
Fターム[2F129GG06]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報の対象となる車両の構成部分 (2,045) | 操舵機構 (425)
Fターム[2F129GG06]に分類される特許
221 - 240 / 425
補給施設案内装置、補給施設案内方法及びコンピュータプログラム
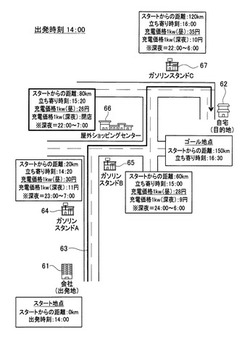
【課題】時間帯によって同一の補給施設でも補給価格が変化することを考慮してエネルギーの補給を行う補給施設を案内する補給施設案内装置、補給施設案内方法及びコンピュータプログラムを提供する。
【解決手段】目的地が設定された場合に、自車の現在位置から目的地までの経路上にある複数の充電施設を検出し、検出されたそれぞれの充電施設について自車が到達する到達予想時刻を算出し、更に、時間帯によって異なる充電価格を考慮して到達予想時刻における充電価格を比較し、充電に必要なコストが最も安くなるように充電を実施する対象となる充電施設を選択とともに、選択された充電施設を案内するように構成する。
(もっと読む)
情報報知装置、情報報知方法及びプログラム

【課題】案内交差点の進行方向を運転者に違和感を感じさせないで的確に報知することが可能となる情報報知装置、情報報知方法及びプログラムを提供する。
【解決手段】案内交差点の進行方向を案内する交差点案内区間内に、この案内交差点の進行方向に対して逆方向に進む逆カーブがある場合には、CPU41は、自車位置が逆カーブのコーナ区間を通過して退出クロソイド区間に進入し、且つ、ハンドル3が案内交差点の進行方向と同じ方向に切られるのを待つ。そして、自車位置が逆カーブのコーナ区間を通過して退出クロソイド区間に進入し、且つ、ハンドル3が案内交差点の進行方向と同じ方向に切られた場合には、CPU41は、案内交差点の進行方向に対応する右側振動体53又は左側振動体54の振動を開始して、該案内交差点の進行方向を運転者に報知する(S11〜S19)。
(もっと読む)
無線通信装置
【課題】ネットワークの通信状態に応じて、最適な通信メディアを選択することを可能とする無線通信装置及び無線通信方法を提供することを目的とする。
【解決手段】複数の通信メディアを介して無線通信を行うための送受信部(13、14、15)と、送受信部を用いて複数の通信メディアにおけるそれぞれのネットワーク状態を検出し、検出結果に基づいて複数の通信メディアの内の1つを選択する制御部(11)を有することを特徴とする無線通信端末(10)。
(もっと読む)
車載ナビゲーション装置
【課題】運転者にとって迷いやすい交差点を精度よく検出可能な車載ナビゲーション装置の提供。
【解決手段】車載ナビゲーション装置1は、位置検出器3によって検出された車両の現在地と、入力された目的地との間で誘導経路を形成する。車両が交差点において誘導経路から外れた場合、速度センサ6、Gセンサ7あるいはジャイロスコープ23によって検出された車両状態が所定状態となり、かつ、生体状態検出センサ19、カメラ20あるいはマイク15によって検出された運転者の身体状態が所定の状態となった場合に、運転者の過誤により車両が誘導経路から外れ、運転者にとって迷いやすい交差点であると判定して、誘導経路から外れた交差点を特定するデータを車両外部の情報センタ26に送信する。情報センタ26は、車両からの交差点を特定するデータを収集し、運転者にとって迷いやすい交差点であることを車両に対して知らせるデータを形成する。
(もっと読む)
自車位置認識装置及び自車位置認識プログラム
【課題】分岐点、特に狭角分岐点において分岐する複数のリンクの中から自車両が通行するリンクを精度良く判定する自車位置認識装置を提供する。
【解決手段】自車位置情報Pと道路情報M、Rとに基づいて自車両が通行するリンクを判定するリンク判定部13により判定されたリンクに基づいて、リンクの分岐点において自車両が通行した経路を示す通行履歴情報Cを生成する履歴情報生成部15を備える。 通行履歴情報Cは学習データベースDB2に記憶される。学習部18は、通行履歴情報Cに基づいて、分岐点において分岐する複数のリンクの中から自車両が通行するリンクをリンク判定部13により判定する際の各リンクの優先度を示す学習優先度情報Rcを生成する。
(もっと読む)
車両自動ガイダンスメモリ
車両自動ガイダンスにおいて使用するためのオンボード・メモリのための方法および機器を開示する。車両のオンボード・メモリは、その特定の車両および/または車両のクラスに特有の自動ガイダンスにおいて使用される情報を記憶し、その情報を車両通信ネットワークを介して受け渡すことが可能である。次いで、その情報は、車両の自動ガイダンスを支援するために、取外し可能なマスタ・コントローラおよび/または取外し可能な衛星測位受信機に転送される。このようにして、マスタ・コントローラおよび/またはGPSユニットは、車両から取り外され、かつ/または車両に再設置されることが可能であり、車両特有の情報を記憶する必要がない。  (もっと読む)
(もっと読む)
車載ナビゲーション装置
【課題】運転者が無意識のうちに普段とは異なる傾向で運転しているときに、運転者に注意を喚起する。
【解決手段】車載ナビゲーション装置1は、運転者が過去に運転した運転パターンを過去運転パターンとして記憶しており、車両が駐車を終了すると、当該駐車に係る駐車終了時刻と駐車時間と駐車位置とを駐車データとして取得し、地図データと駐車データとを解析して駐車期間中に運転者が利用していた施設を利用施設として特定し、特定した利用施設を出発地として目的地に向かって運転を開始したと仮定したときの過去運転パターンと運転者が駐車位置から目的地に向かって運転を開始したときの現在運転パターンとを照合し、両者が合致しないときに、警告を出力する。
(もっと読む)
ナビゲーション装置及び最寄検索方法
【課題】本発明は、ユーザにとって有益な最寄地点を煩雑な操作なしに簡単に検索できるようにする。
【解決手段】本発明は、GPS衛星からの情報に基づいて現在位置を求め、地図画像の上で当該現在位置から目的地までの走行経路を案内するナビゲーション装置の最寄地点を検索する場合、ナビゲーション地図画像NG1をLCD24に表示し、ユーザからのタッチ操作に従ってナビゲーション地図画像NG1上の自車位置マークP1の周辺に存在している最寄地点を検索する際、その検索対象範囲をタッチ操作だけでユーザに指定させ、その検索対象範囲を検索することにより得られた最寄地点をLCD24に表示することにより、ユーザの意図した検索対象範囲に関する有益な最寄地点だけを検索処理結果として提供することができる。
(もっと読む)
駐車支援装置
【課題】より適切に運転者の駐車操作を支援することができる駐車支援装置を提供すること。
【解決手段】本発明による駐車支援装置1は、車両の駐車位置を探索する探索手段2aと、前記駐車位置に対応する一連の駐車操作と駐車軌跡を駐車情報として検出する検出手段2bと、前記駐車情報を記憶する記憶手段73と、前記記憶手段に記憶された前記駐車位置における前回の前記駐車情報と前記検出手段が検出した今回の前記駐車情報とを比較して、今回の前記駐車情報を構成する駐車操作が少ない場合に、前回の前記駐車情報を今回の前記駐車情報に更新する更新手段72を備えることを特徴とする。
(もっと読む)
車両用ナビゲーション装置
【課題】エンジンの燃料消費量を低減可能なハイブリッド車両に取付けられる車両用ナビゲーション装置の提供。
【解決手段】車載ナビゲーション装置2は、駆動輪13を駆動するためにエンジン11、およびモータ14を備えたハイブリッド車両1に取り付けられている。車載ナビゲーション装置2は、モータ14に電力を供給するバッテリ16の充電量を検出し、検出されたバッテリ16の充電量と地図データに基づいて、現在地と目的地との間において形成された各々の走行経路について、ハイブリッド車両1が走行する場合の走行方法に関するシミュレーションを行う。シミュレーションにおいて、各走行経路は走行方法ごとに細分され、細分された各区間は、それぞれ走行方法に従って重み付けされ、車載ナビゲーション装置2は各区間の重み付けの和に基づいて、エンジン11の燃料消費量を低減させる走行経路を提示する。
(もっと読む)
車両挙動学習装置及び車両挙動学習プログラム
【課題】道路上の特定の位置における頻度の高い車両の挙動を、高い位置精度を伴って学習することが可能な車両挙動学習装置を提供する。
【解決手段】自車位置情報Lと、自車両の周辺の画像情報Gと、自車両の周辺の地物情報Fとを取得し、画像情報Gに含まれる対象地物の認識処理が行われる。挙動検出手段7は、画像認識に成功した位置から所定範囲内の自車両の挙動を検出する。検出結果を表す挙動検出情報Bは、検出位置の情報と関連づけて検出結果記憶手段8に記憶される。学習挙動抽出手段29は、自車両が同じ場所を複数回通行することにより検出結果記憶手段8に記憶された、同じ自車両の挙動についての複数の挙動検出情報Bに基づいて、繰り返し検出される自車両の挙動を学習挙動として抽出し、学習挙動の属性情報及び位置情報を対応する対象地物の地物情報Fと関連づけた学習挙動情報Rとして出力する。
(もっと読む)
走行案内装置、走行案内方法及びコンピュータプログラム
【課題】特定施設と自車との位置関係に基づいて案内の制限を行うことにより、不要な案内によって運転者の集中力を低下させることのない走行案内装置、走行案内方法及びコンピュータプログラムを提供する。
【解決手段】学校の周辺エリアを規定するスクールゾーンとして、進入用スクールゾーンと進入用スクールゾーンより広い退出用スクールゾーンの2種類を設定し、自車がいずれかの学校の進入用スクールゾーンに進入し(S11:YES)、スクールゾーンに関する案内を行った(S13)後には、自車が案内対象である学校の退出用スクールゾーンから退出するまでの間、その後のスクールゾーンに関する案内を制限する(S15)ように構成する。
(もっと読む)
車載機器機能説明装置
【課題】状況に応じた機能の説明をユーザに行うことができる車載機器機能説明装置を提供すること。
【解決手段】本発明による車載機器機能説明装置1は、車載機器の各種機能の説明を記憶する記憶手段7と、前記機能を利用することが好ましい状況であるかを判定する判定手段2dと、判定手段2dが前記機能を利用することが好ましい状況であると判定する場合に、前記機能の説明を提示する提示手段2eと、を備えることを特徴とする。
(もっと読む)
車両ガイドシステム
【課題】個々の車両がネットワーク内で自由に走行できるようにすること
【解決手段】所定の経路に沿って車両(10)を管理するための車両ガイドシステムは、車載コンピュータ(26)と、多数の距離センサ(18、20、22、24)と、コンピュータによって制御可能なステアリングシステム(16)とを備える。コンピュータ(26)のメモリ(28)内には所定の経路が記憶されており、作動時に所定の経路に従うようにステアリングシステムが制御される。センサ(18、20、22、24)は、所定の経路に沿って設けられた縁部(30、32)とセンサとの間の、車両の走行方向Aに対する横方向の距離を測定するようになっており、コンピュータ(27)は、センサが検出した所定の経路からの横方向の偏差を補正するように、ステアリングシステム(16)を制御するようになっている。
(もっと読む)
車載機器の誤操作防止装置および誤操作防止方法
【課題】車載機器を操作するための入力部に対する誤操作を適切に防止することができる技術を提供する。
【解決手段】運転操作部に対する操作を行う際に当該操作を行う運転者の手が動作する範囲内に設けられた入力部に対する操作を検出し、前記運転操作部の操作状態を特定するための情報を取得し、前記運転者によって前記運転操作部に対する操作が行われているか否かを前記情報に基づいて判定し、前記運転操作部に対する操作が行われているときは、行われていないときよりも、前記入力部に対する操作が検出されてから当該操作を受け付けるまでの不感時間を長くする。
(もっと読む)
車両運転警告装置
【課題】車両が旋回運動を終了した後に、運転者の車両操作に対する警告を行う車両運転警告装置を提供する。
【解決手段】車両2において各種センサで検出された車両状況とナビゲーション装置10から取得したナビゲーション情報に基づいて車両2の旋回運動が終了したか否かを判定し(S13)、車両2の旋回運動が終了したと判定された場合(S13:YES)には、運転者の車両操作のタイミングが適切であるか否かを判定する際の基準となる地点として旋回開始点Sを検出し(S14)、検出した旋回開始点Sを基準として、旋回運動に対する運転者の車両操作が適切であったか否かを判定し(S16)、判定結果に基づいて運転者に対して警告を行う(S17)ように構成する。
(もっと読む)
走行案内装置
【課題】自車の現在位置のマッチングが一時的に中断される状況となっても、不要な案内によって運転者の集中力を低下させることのない走行案内装置を提供する。
【解決手段】自車の現在位置のマッチングができない状態となった場合に、自車が位置したスクールゾーンの学校の位置座標を学校座標DB23に記憶し、その後、マッチング可能な状態へと復帰した際に、自車が範囲内に位置するスクールゾーンの学校の座標と学校座標DB23に記憶された学校の座標とが一致するか否かを判定し、一致すると判定された場合には、既に同一のスクールゾーンに対する案内を行っているので、スピーカ16による案内を行わずに、ディスプレイ15を用いて自車が位置するスクールゾーンの案内を画像のみにより行うように構成する。
(もっと読む)
ナビゲーション装置における地図データ上に道路指標を配置する方法
【課題】 単位地図データの境界マージン内に配置されるべきシールドアイコンその他の道路指標を、単位地図データ内の好適な位置に再配置する「ナビゲーション装置における地図データ上に道路指標を配置する方法を提供する。
【解決手段】 単位地図データ内におけるシールドアイコンの配置を決定する際に、単位地図データ周囲の境界マージン内に、シールドアイコンの配置位置があるかを判断し、存在する場合、単位地図データ上の該境界マージンに掛からない位置を新たな配置位置として選定する。更に、その所定範囲内に他の地図上情報が存在しているかを判断し、存在していない場合に、この選定された位置をシールドアイコンの最終的な配置位置とする。
(もっと読む)
車両の走行安全装置
【課題】乗員の意思に応じて接触回避支援手段の過剰動作を抑制するようにした車両の走行安全装置を提供する。
【解決手段】検出された物体との接触の可能性があると判断される場合、検出された物体との接触回避を支援する接触回避支援動作を実行すると共に(S18)、車両が走行する道路のデータを記憶し(S20)、車両の位置を検出し(S22)、検出された接触回避支援手段の動作地点を含む道路のデータの所定範囲を接触回避支援手段が動作した後の車両の乗員の操作に応じて接触回避支援手段の過剰動作抑制領域として設定する(S24からS28)と共に、車両が設定された過剰動作抑制領域を走行するとき、接触回避支援手段の動作を抑制する。
(もっと読む)
走行レーン判定装置
【課題】走行環境やドライバ意図、道路形状に影響されることなく精度良く車両の走行レーンを判定する。
【解決手段】情報処理部1は、車速が設定車速以上で、且つ、道路地図情報より複数の走行レーンが存在する道路上を走行している車車間通信が確立されている他車両の中から判定対象とする車両を選択し、判定対象が旋回走行状態の場合は、運転状態を基に判定対象の旋回半径を演算し、該旋回半径と予め設定しておいた閾値とを比較して走行レーンを判定する一方、判定対象が直進走行状態の場合は、過去に走行レーンを走行した車両位置の分布を基に判定対象の位置座標を座標変換し、該座標変換した位置座標の値と予め設定しておいた閾値とを比較して走行レーンを判定する。
(もっと読む)
221 - 240 / 425
[ Back to top ]