
Fターム[3B150LB02]の内容
Fターム[3B150LB02]に分類される特許
161 - 180 / 522
ミシンの生産管理装置
【課題】より好適にミシンの生産管理を行うことが可能なミシンの生産管理装置を提供する。
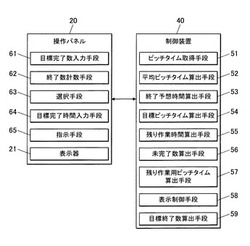
【解決手段】ミシン1は、オペレータによってミシン1に関する各種情報が入力されると共にミシン1の各種情報が表示される操作パネル20と、ミシン1の各種動作制御を行う制御装置40と、を備え、操作パネル20は、所定の縫製作業の目標完了数を入力する目標完了数入力手段61と、現在の終了数Aを計数する終了数計数手段62と、として機能し、制御装置40は、所定の縫製作業のピッチタイムを取得するピッチタイム取得手段51と、ピッチタイムの平均を算出する平均ピッチタイム算出手段52と、平均ピッチタイムと目標完了数とから、目標完了数分の所定の縫製作業の終了予想時間を算出する終了予想時間算出手段53と、として機能する。
(もっと読む)
ミシン

【課題】糸調子皿により糸に付与する張力に応じて、糸取りばねにより糸に付与する張力を調節すること。
【解決手段】天秤を往復運動させて縫い針への糸の供給量を調節しつつ、第1アクチュエータ(41)の駆動により糸に付与する糸張力を調節可能なミシン(1)において、糸調子軸(49)を回動させて、糸取りばね(50)の取付角度を調節する第2アクチュエータ(83)と、第2アクチュエータの駆動を糸調子軸に伝達する伝達機構(80)と、糸張力を入力する入力手段(60)と、入力された糸張力に基づき、駆動軸の移動量及び糸調子軸の取付角度を記憶する記憶手段(70)と、糸張力の入力があった場合に、記憶手段から読み出した駆動軸の移動量及び糸調子軸の取付角度に応じて第1アクチュエータ及び第2アクチュエータを駆動させる制御手段(70)と、を備える。
(もっと読む)
刺繍データ作成装置、刺繍データ作成プログラム、及び、刺繍データ作成プログラムを記録した記録媒体
【課題】ブラインドステッチで画像の印象により近い表現で刺繍を行う刺繍データ作成装置を提供する。
【解決手段】画像が分割領域に分割される(S2)。分割領域ごとに領域内の画素数が計数され(S3)、黒色の画素数が計数され(S4)、分割領域の画素数と黒色の画素数とで排除可能画素数が算出される(S5)。そして、1行目から順に行を排除するか否かの判定が行われ、上排除行が決定される(S6)。具体的には、1行目から判定行までの黒画素数の和が排除可能画素数以下であれば、判定行は排除すると判断される。そして、判定行が排除されないと判断されたら、判定は終了される。次いで、一番下の行から順に行を排除するか否かの判定が行われ、下排除行が決定される(S7)。これにより利用領域が決定される。そして、振り幅最大値及び振り基準位置が算出される(S3〜S9)。全分割領域の処理が終了したら、刺繍データが作成される(S11)。
(もっと読む)
染色式刺繍機
【課題】 糸染色部で染色された上糸の染色糸を一時的に溜めておくことにより、ヘッド部側の縫い速度を本来の速度で制御することができるようにする。
【解決手段】 基台1の背面側に染色ボックス20を設ける。染色ボックス20内には、糸染色部21、糸駆動部27および糸溜まり部28を設け、上糸ボビン8Aからの上糸を糸道ガイド9を介して矢示c方向に糸染色部21へと糸駆動部27により導く。そして、糸染色部21ではインクジェット部22A等で染色を行い、染色糸Sを下流側の糸溜まり部28に導く。糸溜まり部28では染色糸Sを載置ベルト30上に一時的に溜めることにより、ヘッド部2側での縫い速度と糸染色部21での染色速度との速度差を吸収する。その後は染色糸Sを染色ボックス20内から糸道ガイド9側に向けて矢示e方向に送り出す。
(もっと読む)
ミシン
【課題】 持上げ装置とリフト位置調節装置とを設計する労力を低減させるミシンを提供する。
【解決手段】 ミシンは、縫っている間縫い生地を押さえつけるための少なくとも1つのソーイングフット(10)を有している。持上げ装置(13)はソーイングフット(10)を持上げるために機能する。リフト位置調節装置(30)はソーイングフット(10)の送りリフトを設定するために機能する。持上げ装置(13)とリフト位置調節装置(30)とは、共通の駆動装置(22)を有している。以上により、持上げ装置とリフト位置調節装置とを設計する労力が低減されるミシンをもたらす。
(もっと読む)
ミシン
【課題】設定縫い速度での各アクチュエータの動作確認を可能とする。
【解決手段】ミシンモータ2aにより針上下動を行う針上下動機構と、位置決めモータ76a,77aにより布移動を行う位置決め機構と、縫製に関係する動作を実行するアクチュエータ42,79a,80a,81aと、縫製データ71aに基づいてミシンモータ、位置決めモータ及びアクチュエータの動作制御を行う動作制御手段1000とを備えるミシンにおいて、縫製データに定められた縫い速度に従って回転するミシンモータ又はこれにより駆動される主軸の回転同期信号を仮想的に再現し、ミシンモータを駆動させることなく、仮想的な回転同期信号に同期しながら前記縫製データに基づく位置決め機構及びアクチュエータの動作を実行させる確認動作制御手段1000を備えている。
(もっと読む)
ミシン
【課題】糸の切断をより確実に行う。
【解決手段】ミシン10は、二本の縫い針を保持してミシンモータ1により上下動を行う二本の針棒と、針棒の下端部を揺動させる揺動機構110と、針棒の下降時に前記縫い針が挿入される針穴201a,201bを有する送り歯201と、送り歯に送り動作を付与する送り機構200と、送り機構200による送り歯201の送り量を調節する送り量調節機構250と、水平釜101,102と、送り歯201と水平釜101,102の間で進退往復動作を行う動メス151,152を備えたメス機構150と、送り機構200による送り歯201の送り量を0に自動調節する送り制御モータ260と、送り制御モータ260を動作させる動作制御手段70を備える。
(もっと読む)
ミシンの上糸つかみ装置
【課題】挟持している上糸の糸端部の先端側が生地裏の縫い目に縫い込まれて糸捕捉部を通るループが形成されるのを回避することのできる上糸つかみ装置を提供する。
【解決手段】上糸Tの糸端部TAを捕捉し挟持するための上糸挟持手段26と、上糸挟持手段26を駆動するための駆動手段27とにより、縫い始めに、縫い針Nの糸通し穴Naに挿通されている上糸Tの糸端部TAをベッド部2の針板8の下方でかつ縫い針Nの上下動経路NLから離間した位置で捕捉し挟持するとともに、その後予め設定された針数を針落ちした後、挟持した上糸Tの糸端部TAを解放するように形成するとともに、上糸挟持手段26が上糸Tを捕捉し挟持したときに、上糸挟持手段26による上糸Tの挟持箇所から垂れ下がる上糸Tの糸端部TAを上糸ループTLの引き上げ経路から離間するように糸払いする糸払い手段30を設ける。
(もっと読む)
ミシンの縫製データ作成装置
【課題】類似の縫製データの区別をより好適に行えるミシンの縫製データ作成装置を提供する。
【解決手段】ミシンの縫製データ作成装置は、操作パネル20において縫製データ編集画面を介して任意の針落ち位置に対して各パラメータ値を付加可能であり、縫製データ比較画面21Bにおいて二つの縫製データの情報を同時に表示可能であり、縫製データ比較画面21Bに表示された各縫製データについて、任意の開始点Sをそれぞれ個別に指定可能な範囲指定キーAを表示可能である。また、開始点S以降の針落ち位置について、二つの前記縫製データの針落ち位置の座標及び各パラメータ値が一致するかどうかを判定可能な比較処理をCPU31によって実行可能であり、その処理結果を操作パネル20に表示可である。
(もっと読む)
刺繍データ生成装置
【課題】 装飾ステッチデータを生成できる刺繍データ生成装置を提供する。
【解決手段】 イメージスキャナ11又は画像データ入力装置12からの画像データに基づいて装飾ステッチデータ生成装置3により装飾ステッチデータを生成し、同時に縫い目データ生成装置5により縫い目データを生成する。更に表示データ生成装置4により表示データを生成する。装飾ステッチ条件入力装置15により毛糸やリボンの太さ等を指定し、該指定に応じて装飾ステッチデータ生成装置3はステッチ幅W及びステッチピッチPを適当なものに選択して装飾ステッチデータを生成する。これら生成したデータをメモリカード20に格納する。
(もっと読む)
ミシンの制御装置
【課題】 偏差角度を考慮して、各アクチュエータの駆動制御を綿密に行なうことができ、しかも、複数のミシンの機種に汎用可能なミシンの制御装置を提供すること。
【解決手段】
モータ軸基準角度の信号と、エンコーダ信号とにより、ミシンモータの回転軸の回転角度を検出するモータ角度検出手段と、ミシンの複数の機種に対応させて、マーカ一致刻印角度と、制御角度とを角度情報として記憶している記憶手段と、モータ角度検出手段により検出されたミシンモータの回転軸の角度をマーカ一致回転軸角度として記憶手段に入力する入力手段と、ミシンの複数の機種から該ミシンの機種を特定認識する特定手段と、機種が特定された該ミシンのマーカ一致刻印角度とマーカ一致回転軸角度とに基づいて偏差角度(ズレ位相角)を求め、この偏差角度を考慮して制御角度を補正してミシンモータおよびアクチュエータを駆動する駆動制御手段とを備える。
(もっと読む)
布切り装置
【課題】メスとメス受け部との間隔が広がったとしてもサイクルタイムの短縮化を図る。
【解決手段】布切り装置の制御部は合致位置検出モードと布切りモードとを実行可能である。合致位置検出モードは、メスとメス受け部とを原点位置から接近させる際、パルスモータのパルス数をカウントしながら、パルスモータを所定速度で回転させて、メスとメス受け部とを接近させ、回転量検出部からの検出結果とパルスモータの入力パルスとに偏差が生じると、パルスモータを停止させ、当該停止時のカウント値を合致パルス数として記憶する。布切りモードは、パルスモータのパルス数をカウントしながら、当該カウント値が合致パルス数になるまではパルスモータを第1設定速度で回転させ、カウント値が合致パルス数から所定パルス数まではパルスモータを第1設定速度よりも低速な第2設定速度で回転させて、メスとメス受け部とを接近させ布を切断する。
(もっと読む)
刺繍縫い可能なミシン
【課題】トレース線の変形を行うことによりトレース線を境界線内に収めて円滑なトレース動作を得ることができる刺繍縫い可能なミシンを提供する。
【解決手段】トレース線21は刺繍模様20の外形線(輪郭線)よりも大きな刺繍模様20を囲む4角形状であり、境界線判定装置3はトレース線21が境界線11内にあるか否かを判定する。境界線判定装置3においてトレース線21の少なくとも一部が境界線11の外側にあると判断された場合、許容範囲設定装置4により許容範囲線12が設定され、許容範囲判定装置5により、設定された許容範囲線12が限界範囲線15の内側にあるか否か判断され、内側にない場合は、限界範囲線15が許容範囲線12として設定され、更にトレース線21が許容範囲線12内に収まるか否か判定され、収まる場合はトレース可能にする。
(もっと読む)
ミシンの制御方法
【課題】確実に糸払い動作を行うことができるとともに、この糸払い動作によって上糸の切断端縁を確実に針板の下方から縫製物の上方に位置させることができ、これにより、縫製物の製造作業の効率を向上させる。
【解決手段】針棒8を上停止位置に停止させた後であって糸払い動作を行う前に、天秤9と縫い針5との間における上糸6の搬送経路に設けられた糸押さえ手段15によって、上糸6を移動しないように押さえ、ミシン主軸3を逆回転駆動して針棒8を逆方向に上昇移動させ、針棒8を上死点に位置させた状態によって、糸払い手段25により糸払い動作を行う。
(もっと読む)
ミシン
【課題】糸の切断不良を抑止する。
【解決手段】縫い針11,12を保持する針棒13,14を揺動させる揺動機構110と、縫い針が挿入される針穴201a,201bを有する送り歯201を針棒の揺動に同期して送る送り機構200と、送り機構の送り動作量を調節する送り量調節機構250と、送り歯の下側に配置された水平釜101,102と、送り歯の下方で進退往復動作を行う動メス151,152を備えたメス機構50とを備え、メス機構は動メスの進退往復動作を行うためにミシンモータ1とは別の駆動源51,52を備え、動メスの駆動源の動作タイミングを制御する動作制御手段70を備えている。
(もっと読む)
穴かがりミシン
【課題】より良好なかがり縫いを行える穴かがりミシンを提供する。
【解決手段】
穴かがりミシン10は、ベッド部12と、縦胴部17と、アーム部14とからなるミシンフレームと、ベッド部の上部に設けられ、その上面に縫製物を載置して該縫製物を送る送り台13と、アーム部の先端部に上下方向に沿って設けられ、下端部に縫い針18を有し上下動する針棒11と、開閉可能に設けられて上糸を把持可能な上糸掴み部51と、当該上糸掴み部の開閉を切り替えるクランプシリンダ65及び電磁弁68とを有する上糸掴み装置50と、上糸掴み部51の糸掴み52の右側側面に固定されて設けられその弾性によって上糸端部を保持可能な糸切り保持板69と、を備える。
(もっと読む)
ミシン
【課題】縫製速度調節スイッチの設定状態を操作者に認識させることのできるミシンを提供する。
【解決手段】電源スイッチ11と、起動停止スイッチ7と、縫製速度調節スイッチ9と、縫製速度表示手段8と制御手段21とを設け、縫製速度調節スイッチ9により設定された縫製速度の値を記憶部23に記憶するとともに、電源スイッチ11がオン操作されてミシン1が待機状態に保持されたときには、縫製速度表示手段8による表示を実行するとともに、記憶部23に記憶されている縫製速度の値に応じて縫製速度表示手段8による表示色の切り換えおよび表示点滅を単独もしくは組み合わせて変化するように形成する。
(もっと読む)
ミシン
【課題】縫製中の芯紐を安定させて、縫い目からのはみ出しや縫製中の詰まりを防止し、芯紐入りの鳩目縫いを美しく縫製する。
【解決手段】ボタン径から必要な縫製長さを算出すると共に、算出した縫製長さのボタンホール縫いを行う制御手段を備え、ボタンホール縫い目の形成の際に、当該ボタンホール縫い目を補強する芯紐Tをボタンホール縫い目の形成と共に被縫製物Cに縫いつけるミシンは、折り曲げられた芯紐Tの折曲部T1を保持する芯紐保持部Nと、押さえ枠22に形成され、折り曲げられた芯紐の各端部側を係止する芯紐係止部22dと、を備え、制御手段は、芯紐保持部で芯紐の折曲部を保持すると共に芯紐係止部で折り曲げられた芯紐の各端部側を係止した状態で、折曲部に最初に針落ちさせて被縫製物に鳩目ボタンホール縫い目を形成する。
(もっと読む)
ミシン及び縫製方法
【課題】加工布送りデータに基づいて加工布を送りながら模様縫製用の複数の針落穴を縫製進行方向に対して所定角度傾斜状に形成する穴開け装置を備えたミシンと縫製方法を提供する。
【解決手段】ミシンのアーム部に、セリエステッチ状の縫目形成用の針落穴を加工布に形成する鉛直な穴開け針22を保持する針保持体23と、この針保持体23を昇降駆動可能な昇降駆動手段24と、針保持体23を回動駆動可能な回動駆動手段25とを備えた穴開け装置20を設け、穴開け工程では針棒軸心に対する穴開け針の軸心のオフセット量を加味して加工布送りデータを補正した加工布送りデータに基づいて加工布を送りながら模様縫製用の複数の針落穴を形成し、縫製工程では加工布送りデータに基づいて縫製する。
(もっと読む)
自動糸切りミシンの制御装置
【課題】 縫製工程の途中で糸切り操作を行なうときの終り自動返し縫いをスキップさせたい場合に行っていた手動のスイッチ操作を不要とし、返し縫いの実行・非実行を自動で判別して縫製作業の効率改善を実行できるとともに、仕上がりの縫製状態も良好なものとすることができる自動糸切りミシンの制御装置を提供すること。
【解決手段】 予め設定された縫製針数Aで縫製を行なうとともに、その縫製の糸切り前には所定の返し縫いを行なう制御を可能とされた自動糸切りミシンの制御装置であって、前記糸切り操作の指令が出された場合に、前記縫製針数Aと前記糸切り操作の指令までの実縫製針数Eとの差の針数Rを勘案し、前記返し縫いの実行・非実行を決定する制御手段25を備える。
(もっと読む)
161 - 180 / 522
[ Back to top ]