
Fターム[3B150LB02]の内容
Fターム[3B150LB02]に分類される特許
121 - 140 / 522
ミシン
【課題】ミシンモータにより中押さえの上下動ストロークを容易に検出する。
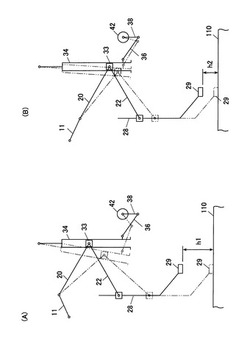
【解決手段】ミシンモータ2aから動力を得て、縫い針の上下動に同期して中押さえ29に上下動させる中押さえ上下動機構M1と、中押さえモータ42を駆動源として、ミシンモータによる中押さえの上下動の上死点位置と下死点位置の高さを上下方向に推移させる中押さえ高さ調節機構M4とを備え、ミシンモータによる中押さえの上死点位置と下死点位置との各々において、中押さえモータによる中押さえの最上位置から針板に当接するまでの下降動作量を検出し、前記ミシンモータによる上死点位置と下死点位置とにおける各下降動作量に基づく中押さえ高さの差からミシンモータによる上下動のストロークを算出するストローク取得制御手段73を備えている。
(もっと読む)
ミシンの糸切断装置

【課題】上糸が内釜回り止めで引っかかってしまうことを防止する。
【解決手段】水平釜の内釜が外釜に追従して回転しないように内釜の回転を規制するため、当該内釜に接触して規制力を付勢する内釜回り止めを有し、水平釜と針穴との間に渡る上糸又は下糸の少なくとも何れか一方の縫い糸を切断するミシンの糸切断装置である。糸切断装置は、針板の下方で進退移動して縫い糸を捕捉する第一糸捕捉部材と、第一糸捕捉部材により捕捉され縫い糸を捕捉して固定刃に案内し切断する第二糸捕捉部材と、内釜回り止めと内釜との間に隙間を形成する隙間形成部と、第一糸捕捉部材による捕捉動作の後に第二糸捕捉部材による捕捉動作と切断動作とを行わせるとともに、第一糸捕捉部材により捕捉された縫い糸が内釜回り止めを通過する際に、隙間形成部による隙間形成動作を行わせる動作装置と、を備える。
(もっと読む)
ボタン付けデータ作成装置及びボタン付けデータ作成方法
【課題】 座標原点から第1針落点までの最初の主移動量と、複数の針落点に順次針落ちさせる為の複数の主移動量と、複数の針落点のボタン穴内の補正移動量とを針落ち順位と対応付けて演算するボタン付けデータ作成技術を提供する。
【解決手段】 複数の針落点の位置情報を針落ち順に入力し、各ボタン穴の基準位置を設定し、針落点の位置情報と各ボタン穴の基準位置とに基づいて、各針落点が属するボタン穴を決定し、各針落点が属するボタン穴の基準位置と各針落点の位置情報とに基づいて、針落ち順に、針落点毎に前記針落点が属するボタン穴の基準位置からの移動量を補正移動量として演算し、各ボタン穴の基準位置に基づいて、針落ち順に、各ボタン穴から次のボタン穴までのボタン穴間の移動量を主移動量として演算し、針落点を規定するデータを、複数の主移動量と、複数の補正移動量とで構成した。
(もっと読む)
ミシン
【課題】縫製パターンデータに被縫製物の高さデータを容易に設定する。
【解決手段】縫い針108を上下動させるミシンモータ2aと、縫製時に被縫製物の浮き上がりを防止する中押さえ29と、縫い針に同期して中押さえに上下動させる中押さえ上下動機構M1と、中押さえモータ42により中押さえの下死点高さを調整する中押さえ高さ調節機構M4と、中押さえの下降接触時の押圧により中押さえが停止するように中押さえモータを制御する中押さえ高さ制御手段73と、中押さえの下降接触による中押さえモータの出力軸の状態変化時の中押さえの高さから被縫製物の厚さを求める厚さ取得処理手段73と、縫製パターンデータに針数の順番に対応づけて被縫製物の厚さを記録する厚さ記録手段73とを備えている。
(もっと読む)
刺繍データ作成装置および刺繍データ作成プログラム
【課題】刺繍模様が自然な縫目によって表現される刺繍データを作成可能な刺繍データ作成装置および刺繍データ作成プログラムを提供する。
【解決手段】刺繍データ作成装置では、画像データに基づいて作成された複数の線分データについて、開始線分L1の終点から候補線分の端点までの距離d1が接続候補距離閾値dの範囲内にあり(S43:YES)、かつ、開始線分L1と候補線分との角度差α1が接続候補角度閾値αの範囲内にある場合に(S45:YES)、その候補線分を開始線分L1と接続される候補線分L2として設定する(S49)。そして、候補線分L2を開始線分L1に接続することで、候補線分L2を現在の角度連続線群データに接続する(S53)。さらに、端点同士が近い順に接続された角度連続線分群データに基づいて、刺繍ミシンでの刺繍縫製に使用される刺繍データを作成する。
(もっと読む)
ミシンの布送り制御装置
【課題】 省スペース化およびコストの削減を図ることが可能であり、さらに、従来の布送り制御装置に容易に取付けることができ、汎用性のある布送り制御装置を提供する。
【解決手段】 揺動ロッド12に位置調節自在に取り付けられ、揺動ロッド12より突出する突出部を有するストッパ板16と、ストッパ板16の突出部に係合する係止部17bを有し、揺動ロッド12の移動を規制する規制位置と規制しない待機位置とを移動可能な係止部17b材と、係止部17b材の係止部17bを待機位置と規制位置との間を移動させるための駆動手段18とを有し、係止部17bを規制位置に移動させて揺動ロッド12の移動を阻止し、送り調節器11の傾斜角度を規制することによって、送りピッチを変更させるように形成されていることを特徴とする角度規制手段10を備える。
(もっと読む)
ボタン表裏判定方法およびボタン表裏判定装置
【課題】多種多様のボタンの表裏を判定することのできるボタン表裏判定方法およびボタン表裏判定装置を提供する。
【解決手段】ボタン表裏判定方法は、相互に色の異なる落射光Laおよび斜光LbをボタンBに照射してボタンBを撮像することにより、ボタンに形成された図柄に基づく画像情報に加えてボタン表面の凹凸形状に応じて色相の異なる色相情報が付加された検出画像データを得、この検出画像データを画像処理してボタンBの表裏を判定する。ボタン表裏判定装置1は、カメラ4、互いに異なる色の落射光Laおよび斜光Lbを照射する照明装置5を備えた撮像手段2と、相互に色の異なる落射光Laおよび斜光LbをボタンBに照射してボタンBを撮像することにより、画像情報に加えて色相情報が付加された検出画像データを得、この検出画像データを画像処理してボタンBの表裏を判定する制御手段3とを設ける。
(もっと読む)
根巻きボタン付けミシン
【課題】ボタン付け・根巻きのそれぞれの工程に対応して、糸繰り出し量を適切にコントロール可能な根巻きボタン付けミシンを提供する。
【解決手段】ボタンを被縫製物に縫い付けるボタン付け工程と、ボタン付け工程によって縫い付けられたボタンと被縫製物との間の縫製糸を補強する根巻き工程とを1サイクルとしてボタン付けを行い、少なくともボタン付け工程と根巻き工程の最後には糸切りを行う根巻きボタン付けミシン10において、通電される電流量によって繰り出す糸の繰り出し量を変更可能な糸繰り出し手段(糸繰り出し装置30)と、糸切り後、前記糸繰り出し手段を駆動して繰り出す糸の繰り出し量を、次の工程に応じて設定する繰り出し量制御手段(マイコン50)とを備える。
(もっと読む)
ミシン
【課題】布厚等にかかわらず、安定した押さえ圧で布を押さえ、損傷を防止すること。
【解決手段】布押さえ機構と、押さえモータ11と、検出手段12と、制御手段100と、を備えるミシン1において、布押さえ21の下降の際に、目標となる下降位置の指令信号を押さえモータに送信すると共に、検出手段により検出された布押さえの位置をフィードバックして押さえモータの駆動を通常電流で制御する位置制御手段100と、押さえモータに通電する駆動電流を通常電流よりも減少することで布押さえがゆっくり降下し被縫製物を押さえる押さえ圧を低下する圧力制御手段と、布押さえの下降制御を位置制御手段から圧力制御手段に切り替える布押さえの切替位置を記憶する記憶手段104と、下降する布押さえが記憶手段に記憶された切替位置に到達したときに、布押さえの下降制御を位置制御手段から圧力制御手段に切り替える切替制御手段100と、を備えた。
(もっと読む)
ミシンのモータ制御装置
【課題】低廉でありながらモータの停針を精度良く行う。
【解決手段】主軸の一回転の範囲を停止位相範囲H6と順回転方向の低速回転範囲H1と順回転方向の高速回転範囲H2と逆回転方向の低速回転範囲H5と逆回転方向の高速回転範囲H4とに分類し、主軸に固定された遮蔽板によりON-OFFされる光学素子を有する二つの主軸検出手段13,16と、前記五つの角度範囲をこれら検出手段によるON-OFF出力の組み合わせから四つの検出状態に識別し、さらに、主軸を回転させた時の検出状態変化ににより五つの範囲を全て識別する主軸範囲判定部43,45と、各低速回転範囲の検出時には各高速回転範囲の検出時よりも低速回転するようにミシンモータ11を制御する停針制御部45とを備えている。
(もっと読む)
ミシン
【課題】操作パネルに表示される操作設定の有効と無効の切り替えの手間を軽減する。
【解決手段】表示部52に表示される画面毎に、入力部51による入力の有効又は無効に連動させる入力部群を記憶する入力部群記憶手段62と、表示部に表示される互いの画面間で入力部による入力の有効又は無効に連動させる入力部群を有する画面群を記憶する画面群記憶手段62と、を備え、制御手段6は、操作条件が第1の条件を満たす場合に、ユーザーにより押下された入力部による入力を有効又は無効に切り替え、第2の条件を満たす場合に、ユーザーにより押下された入力部と同じ群の入力部による入力を有効又は無効に切り替え、第3の条件を満たす場合に、ユーザーにより押下された入力部を含む入力部群を有する各画面の入力部と同じ群の入力部による入力を有効又は無効に切り替えるように連動させる。
(もっと読む)
ミシンの布押さえ昇降装置
【課題】電源遮断時の布押さえ高さの固定状態を解消する。
【解決手段】布押さえ5を昇降するエアシリンダ4と、空気圧供給源20からエアシリンダの各空気室4U,4Dへ空気圧を供給する第一の電磁弁10と、布押さえを操作する操作入力手段30と、第一の電磁弁を制御して布押さえの高さを切り換え、下降時間の長さにより布押さえを中間停止させる制御手段40と、エアシリンダの各空気室に設けられた予備排気経路71,72と、各予備排気経路に設けられた逆止弁73aと、各逆止弁に空気圧を供給する閉塞圧供給経路74と、各逆止弁の排気側に対する空気圧供給状態と大気解放状態とを切り換え可能な第二の電磁弁75と、主電源の通電時には空気圧供給状態とし、主電源の切断時には大気解放状態に第二の電磁弁を切り替える押さえ解放制御回路77を備えている。
(もっと読む)
ミシン
【課題】中間位置の設定を容易に行うことができ、作業効率を向上すること。
【解決手段】布押さえ機構と、押さえモータ11と、操作ペダル70と、制御手段100と、を備えるミシン1において、布押さえを下降させる場合に、当該布押さえが被縫製物に当接して下降が停止したときの検出手段(12)によって検出された押さえモータの駆動量に応じた布押さえの下降量と、下降前の布押さえの針板からの初期高さとから被縫製物の厚さを算出する布厚算出手段(100)と、算出された布厚に加算する補正値を記憶する補正値記憶手段(104)と、算出された布厚に補正値を加算して中間位置を算出する中間位置算出手段(100)と、算出された中間位置を記憶する中間位置記憶手段(104)と、を備え、制御手段は、中間位置の算出後、布押さえで被縫製物を押さえた状態から布押さえを上昇させる際に、記憶された中間位置で布押さえの上昇を停止させる。
(もっと読む)
ミシンの布押さえ装置
【課題】ボタンホール用の布押さえの着脱の際におけるユーザの操作を省くことができ、作業効率を向上すること。
【解決手段】布を押さえる布押さえ11と、布押さえを支持し、布押さえが布を押さえる押圧位置と布の押さえを解除する解除位置との間で昇降する押さえ棒12と、押さえ棒を下方に付勢する付勢部材19と、押さえ棒に係合し、押さえ棒を付勢力に抗して上昇させる押さえ棒駆動機構20と、縫製を行う模様を選択する設定手段40と、を備えるミシンの布押さえ装置1において、押さえ棒にボタンホール縫い用の布押さえが装着されているか否かを検出する検出手段50と、ボタンホール縫いを行う設定がされている場合において、押さえ棒にボタンホール縫い用の布押さえが装着されていないことを検出したときに、押さえ棒駆動機構を動作させて押さえ棒を上昇させる制御手段60と、を備える。
(もっと読む)
ミシン
【課題】ミシンの縫製速度変化にも対応したステッピングモータの制御を行う。
【解決手段】ステッピングモータ76a,77aにより被縫製物の移動位置決めを行う位置決め機構120と、縫製パターンデータ71aに基づいてステッピングモータの動作制御を行う縫製制御手段73とを備え、ミシンの縫製速度を設定に応じて可変とするミシンにおいて、一針分の位置決め動作を行うステッピングモータの駆動パルス列の各パルスの出力時間間隔を定めた駆動パターンPを、複数の位置決め動作量及び複数の縫製速度について個々に記憶するパターン記憶部72を備え、縫製制御手段は、縫製パターンデータに定められた位置情報に基づく位置決め動作量と設定された縫製速度とに基づいて駆動パターンを選択し、ステッピングモータの動作制御を行う。
(もっと読む)
穴かがりミシン
【課題】縫い幅の選択肢を減らすことなく、縫製データの容量を減らすこと。
【解決手段】穴かがりミシンは、縫い幅を入力する縫い幅入力手段60と、入力された縫い幅の比率を算出する比率算出手段3と、一方の側縫い部の外側の針落ち位置の座標データを算出する第1の位置算出手段3と、一方の側縫い部の幅を算出する側縫い幅算出手段3と、他方の側縫い部の外側の針落ち位置の座標データを算出する第2の位置算出手段3と、を備え、制御手段3は、記憶手段32に記憶された双方の側縫い部の内側の針落ち位置の座標データと、第1の位置算出手段により算出された一方の側縫い部の外側の針落ち位置の座標データと、第2の位置算出手段により算出された他方の側縫い部の外側の針落ち位置の座標データと、に基づいて針上下動機構、送り機構及び針振り機構の駆動を制御する。
(もっと読む)
ミシン
【課題】縫製データの入力を簡単に行えるようにする。
【解決手段】ミシンモータ2a、位置決めモータ76a,77a及び縫製に関係する動作を実行するアクチュエータ42,80a,81aと、所定情報の表示を行う表示手段74bと、縫製データ71aに基づいてミシンモータ、位置決めモータ及びアクチュエータの動作制御を行う動作制御手段1000と、を備えるミシンにおいて、縫製データに基づいて縫製動作を再現する動作確認モードを実行する動作制御を行う確認動作制御手段1000と、動作確認モードにおいて針数ごとに順番に動作を再現する過程で、いずれかの針数に設定された項目に対して、項目の設定内容の確認メッセージを表示手段に表示させるか、又は、項目に伴って実行されるべき他の項目の設定が同じ針数に存在しない場合に追加を促す確認メッセージを表示手段に表示させる確認表示制御手段とを備えている。
(もっと読む)
ループ材供給装置
【課題】 ミシンの布送り動作時にループ材におけるミシンの押さえによって押さえつけられた部分と挟持手段に挟持された部分との間において引きつれやねじれが発生してしまうことを防止し、これにより、ミシンによって形状が均一で高品質にベルトループを縫い付ける。
【解決手段】
X方向に挟持手段3を移動するX方向移動手段11と、Y方向に挟持手段3を移動するY方向移動手段12とを備えており、制御手段17は、ミシン2によってループ材20を縫製物本体21に縫い付ける際に、ミシン2が縫製物本体21を縫い形状に合わせて搬送する布送り動作に同期して、縫製物本体21の搬送に倣って挟持手段3を移動するように、X方向移動手段11およびY方向移動手段12の駆動を制御する。
(もっと読む)
穴かがりミシンの異物検知装置
【課題】ユーザの監視負担を軽減し、ハンマーやメスの欠損、布の破損を防止すること。
【解決手段】メス(11)と、送り台(4)と、ハンマー(12)と、支持台(14)と、動作機構(40)と、駆動装置(50)と、制御手段(20)と、を備える穴かがりミシン(1)の異物検知装置において、支持台に設けられてハンマーと共に上下動し、ハンマーが上下動する領域を包囲し、ハンマーよりも下方に配置され、下方に位置する対象物に接する下降位置を検知する検知手段(30)と、被縫製物上に異物がないと認定しうるハンマーの初期位置からの下降量の限界値を記憶する記憶手段(24)と、を備え、制御手段は、検知手段が検知した時点におけるハンマーの初期位置からの下降量が限界値以上である場合に駆動装置の駆動を継続させ、限界値未満である場合に駆動装置の駆動を停止させる。
(もっと読む)
ベルトループ縫いミシンの制御装置およびベルトループ縫いミシンの制御方法
【課題】 挟持手段によるループ材の挟持位置のずれやループ材が挟持手段による挟持から外れてしまうのを防止し、ループ材を縫製物本体の意図する位置に縫い付けることにより、ベルトループの品質の向上を図る。
【解決手段】 1番目の縫製部分であるループ材20の一端部20aを縫い付けた後の、ループ材20を挟持した挟持手段2が押さえ23の下方を通過し、前記1番目の縫製部分を覆うようにループ材20を折り曲げる工程において、制御手段17が、挟持手段3と載置台31とを押さえ23の下方を通過する方向である一方向に移動する第1工程と、制御手段17が、挟持手段3を前記第一方向に移動するとともに、載置台31を前記第一方向と反対の他方向に移動する第2工程とを有する。
(もっと読む)
121 - 140 / 522
[ Back to top ]