
Fターム[3B150NB07]の内容
Fターム[3B150NB07]の下位に属するFターム
反転押え
Fターム[3B150NB07]に分類される特許
61 - 80 / 111
ミシン
【課題】中押さえの下死点位置確認の作業負担の軽減を図る。
【解決手段】縫い針108を上下動させる針上下動機構と、布地を縫い針に相対的に位置決めする位置決め手段と、針上下動機構と連動して中押さえ29を縫い針と同期して上下動させる中押さえ機構1と、中押さえの下死点高さを調整する中押さえ高さ調整手段と、を備え、中押さえ機構は、針上下動機構との連動状態と中押さえを下死点高さに保持しつつ針上下動機構との連動を解除した分離状態とを切り替える中押さえ分離手段を有している。
(もっと読む)
ミシン

【課題】 フリーモーションでキルト縫製を行なう際、設定された縫目ピッチで縫製ができると共に、縫製作業に不慣れな初心者にも何ら不安感を持つことなく楽しみながらキルト縫製を行なうことができる。
【解決手段】 フリーモーション縫製が開始され、ミシンモータ66が駆動され(S41:Yes)、縫針の先端が針板10の下側から上側に移動したときに(S42:Yes、S43:No)、押え足による加工布Wの押圧力が20[N]のときに(S44:Yes)、加工布Wの一部分が撮像される(S45)。押圧力が0[N]に切換えられるので(S46)、作業者により加工布Wが移動され、再度撮像される(S48)。S45の画像データとS48の画像データとに基づいて加工布Wの移動量が演算され(S49)、布移動量が縫目ピッチ以上になったとき(S50:Yes)、押圧力が20[N]に切換えられ(S51)、作業者による加工布Wの移動が不可能になる。
(もっと読む)
ミシン
【課題】上糸保持機構を別途設けずに、縫製開始時に上糸端部が加工布の下側へ抜け出すことを、布押えの上下駆動装置を用いた簡単な構成により確実に防止し、1針目から縫目を形成できるようにする。
【解決手段】布押え上下駆動装置10に布押え上下動位置変更機構13を設け、そのアクチュエータを制御して、縫製動作に同期して上下に移動する布押え6の上下動範囲を、縫製開始から所定針数を縫う間、下方へ変更することで布押えで上糸端部を針板と加工布に押圧すると共に、その後は布押えを通常縫製位置へ切換える布押え制御手段を設けた。縫製開始直後、布押え6は針板上面に押圧されるため、縫針9の目孔から延びる上糸15の端部を針板2a上の加工布Wに押圧することができる。
(もっと読む)
ミシン及びミシンプログラム
【課題】縫製対象布を押える間欠押えを適切な設定位置に設定するミシン及び、当該ミシンに用いられるミシンプログラムを提供すること。
【解決手段】縫製データを記憶したRAMから縫製データを順に読み出し(S22)、縫製データに含まれる縫製順序が最初のステッチデータに基づき縫製する際の間欠押えの使用位置の高さが、縫製データに含まれる間欠押えデータにより指示されていると判断された場合に(S22:Yes)、間欠押え上下駆動装置を駆動させ、間欠押えの設定位置を、待機位置から、間欠押えデータにより指示される高さの使用位置に切り替える(S23)。続いてスタートペダルがONされていると判断されると(S30:Yes)、縫製データが順に読み込まれ(S50)、縫製データに包含されるステッチデータに基づき(S60:Yes)、縫製対象布に縫目が形成される(S62)。
(もっと読む)
ミシンの制御装置
【課題】ミシンに備えられるソレノイドのミシンに対する適正を判断することができるミシンの制御装置を実現する。
【解決手段】ミシンの制御装置100は、布押さえ6を動作させるために押え上げソレノイド6aに供給される駆動電源からの電力の通電と遮断とを切り替えて、その電力をソレノイド6aに連続通電させたり間欠通電させたりする。そして、ミシンの制御装置100は、布押さえ6を動作させる際にソレノイド6aに流れる電流値を検出し、連続通電の際と間欠通電の際とでそれぞれ検出される電流値が、連続通電と間欠通電とに対応してそれぞれ設定されている所定の適正範囲内にあるか否かを判断し、連続通電と間欠通電の少なくとも一方において検出された電流値が所定の適正範囲内にないと判断した場合に、そのソレノイド6aは不適正なものであるとして、そのソレノイド6aへの電力供給を停止することとした。
(もっと読む)
ミシン
【課題】がたつき等による縫い長さの検出や縫製の切り替えタイミングの検出の際の誤差を極力減らし、ボタンホール縫いの品質向上を図る。
【解決手段】ミシン10は、押さえ体21と、押さえ枠22と、固定部23aと摺動部23bとを有するボタン挟持装置23と、押さえ枠に設けられた被摺動部材24aと、押さえ体に連結され、被摺動部材に対して摺動する摺動部材24bとを有する位置検出手段24と、摺動部に設けられた検出部25aと、押さえ体に設けられ、検出部に当接する被検出部25bとを有する検出手段25と、検出手段がボタンの径に相当する長さまで縫製が行われたことを検出した場合に、そのときの押さえ体の変位量を位置検出手段から取得し、ボタンの径に応じたボタンホール縫いを行うように縫い針の駆動や被縫製物の送りに関する制御を行う制御手段と、を備える。
(もっと読む)
多頭式刺繍機
【課題】 刺繍機の運転速度に応じて布押え足の高さを自動的に素早く補正して最適化する。
【解決手段】 多頭式刺繍機1の複数台のミシンヘッド3に下死点位置の布押え足14の高さを調整する調整機構を設ける。各調整機構を連結軸40で連結し、連結軸40をアクチュエータ45で駆動する。操作盤7に刺繍柄データ中の針数情報を画面表示する表示部61と、オペレータが針数情報に関連付けて布厚を入力する入力部60とを設ける。制御盤8は入力された布厚と主軸回転数とに応じてアクチュエータ45を制御することにより下死点位置の布押え足14の高さを補正する。アクチュエータ45に布押え高さの現在値を機械的に表示する表示器46を付設する。
(もっと読む)
ミシン
【課題】 フリーモーションでキルト縫製を行う際において、作業能率を低下させることなく、縫製再開時に加工布の縫製位置がずれるのを防止する。
【解決手段】 ミシンは、実用模様の縫製を行う第1モードと、フリーモーションでキルト縫製を行う第2モードと、縫製模様を選択することで第1モードと第2モードとを択一的に切換え可能な操作用タッチパネルとを備え、第1モードに切換えたとき、縫製の動作状態に関わらず押え足が下降して加工布を押える布押え位置を保持し、一方、第2モードに切換えたときは、縫製の動作中は押え足が加工布から所定小距離だけ上方へ上昇した小距離上昇位置を保持し、且つ縫製停止中は押え足が下降して布押え位置に移動するように制御する。
(もっと読む)
ミシン
【課題】 ワイパーによる不具合を検出することで、中押さえの動作不良の原因を特定し、スムーズな対処を可能とする。
【解決手段】 このミシンには、縫い針を縫製物から抜く際に当該縫製物を針板に向けて押さえ付ける中押さえと、縫製が終了して糸が切られた後に縫い針及び中押さえの間を横切って中押さえに挿通された糸を抜くワイパーとが設けられている。また、ミシンには、電流が付与されると糸を抜く方向にワイパーを移動させて、電流の付与が無くなると元の位置に戻る方向にワイパーを移動させるソレノイドと、ワイパーが元の位置に戻る際に、ソレノイドから発生した電流の有無を検出する検出部とが設けられている。そして、ミシンには、ソレノイドから電流が発生していないと検出部が検出した場合、ワイパーが元の位置に戻っていないと判断して、エラー処理を施す制御部が設けられている。
(もっと読む)
布表面の膨出部に対する刺繍模様の刺繍方法及び刺繍物
【課題】布押さえの下死点位置を、アップリケの表面における凹凸面の夫々の高さに対応する高さ寸法でもって刺繍を施すことができる刺繍方法及び刺繍物を提供する。
【解決手段】刺繍模様を刺繍するに際し布表面の一部に表れる膨出部に対しても刺繍を施す場合には、刺繍データに基づいて刺繍枠を移動させ、針板の針落位置の上位置に布に配置された膨出部の一部が来たときミシン動作を停止し、高さ位置合わせ工程を施して布押え部の高さを定め、さらに、高さデータ変更工程を施し、引続き刺繍データに基づいて刺繍枠を一針毎に移動させ、その都度高さ位置合わせ工程と、高さデータ変更工程を繰り返し、膨出部上面における刺繍予定位置の夫々の高さデータを膨出部の上面高さに対応する高さデータに夫々変更し、上記変更された刺繍データに基づき刺繍模様を刺繍する。
(もっと読む)
ミシン
【課題】ミシンにおいて保持される被縫製物に対する縫い針の針先の位置を確認しやすくすることができるミシンを実現する。
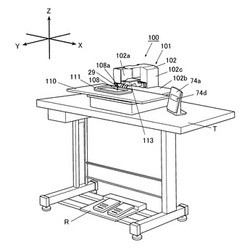
【解決手段】ミシン100を停止して主軸2の回転を止めた状態において縫製パターンを設定する際に、操作パネル300を操作することによって、中押さえ退避機構M3による中押さえ29の退避を解除するとともに、中押さえ高さ調節機構M4を駆動させて中押さえ29の高さを可動範囲の最上点と最下点とに切り替えることなどによって、針板110上の保持枠111に保持されている被縫製物に対する縫い針108の針先位置を確認することや、中押さえ29と保持枠111とが接触してしまわないように確認することを可能にした。
(もっと読む)
ミシン
【課題】簡単な機構でかつメンテナンスを容易に行い、縫製品質の低下を防止する。
【解決手段】押さえ棒の下端に設けられた連結部21と、被縫製物を押さえる押さえ足部22と、押さえ足部に協働してボタンを保持した状態で被縫製物の送り方向に移動するボタン保持部24と、ボタン穴かがり縫いの前位置及び後位置と、さらに鳩目穴かがり縫いの環状部と直線部の境界位置とを、それぞれ指示するように外部に露出して設けた被当接部26,27,28と、を備えたボタン穴かがり押さえ2と、ミシン本体に備えられ、ボタン穴かがり押さえが縫製動作中に移動しているときに、所定位置で各被当接部と接触させて各被当接部を検出する検出手段3とにより、鳩目ボタン穴かがり縫い中に、前位置又は後位置の被当接部を検出したときに鳩目ボタン穴かがり縫いの送り方向を切り替えるとともに、境界位置の被当接部を検出したときに環状部と直線部の縫いを切り替える。
(もっと読む)
玉縁縫いミシン
【課題】 縫い品質を向上する。
【解決手段】 布地の搬送を行う布移動機構40と、フラップ布Fを保持するフラップ保持機構55と、縫製を行う縫製手段と、大押さえの上面の反射面41cからの反射光を検出するフラップ検出手段30と、反射面がフラップ布に遮蔽されて反射光が遮られることでフラップ端部位置を求め縫製手段を制御する制御手段60とを備え、フラップ検出手段は縫い針の並び方向に沿って位置調節可能であって、反射面上で反射光の状態変化を生じさせる指標手段35と、基準位置を記憶する初期位置記憶手段62と、を備え、制御手段は、指標手段が示す基準位置と初期位置記憶手段の基準位置とを比較して位置ズレを求め、位置ズレ分を修正してフラップ布の縫着制御を行う、という構成を採っている。
(もっと読む)
ミシンの布押さえ装置
【課題】操作者の熟練度に関係なく縫製品質を安定させることができ、時間の制限を受けることなく布を正確にセットする。
【解決手段】ミシンの布押さえ装置1は、布押さえ2と、昇降手段3と、昇降手段に対して下降駆動又は下降停止の指示を行う駆動指示手段4aと、縫製終了時は、昇降手段により布押さえを自動的に上昇させ、布押さえ下降時は、駆動指示手段による下降駆動指示又は下降停止指示が交互に出力される毎に、駆動指示手段による下降駆動指示に基づき布押さえを昇降手段により順次下降させ、駆動指示手段による下降停止指示に基づき昇降手段による布押さえの下降を直ちに停止させ、布押さえが被縫製物を押さえた時に駆動指示手段による下降駆動指示を無効にするように昇降手段の駆動を制御する制御手段5と、を備える。
(もっと読む)
ミシン
【課題】簡単な構成で、被縫製物の厚みの変化に対応して縫い始めの上糸端を確実に布の裏側に引き込むことが可能な装置を提供する。
【解決手段】このミシンには、押さえ足を支持する押さえ棒と、押さえ足を移動させるためのアクチュエータと、押さえ足を上昇状態、下降状態、中立状態の各状態にアクチュエータを切り替える切替部と、切替部がアクチュエータを中立状態にした場合、布厚に対応するように、アクチュエータの一端部及び押さえ棒の隙間を補正するか、又は前記アクチュエータの突出量を補正する補正手段とが備えられている。ミシンには、縫製開始時に、アクチュエータにより押さえ足を下降状態にして被縫製物を押圧してから、中立状態とし、被縫製物を貫通した上糸を釜が捕捉する際にアクチュエータが所定時間押さえ足を上昇状態とするように切替部を制御する制御部が備えられている。
(もっと読む)
ミシン及び縫製条件設定方法
【課題】中押さえの下位置高さの設定を忘れて縫製が開始されることを防止する。
【解決手段】ミシン100は、針板上面で保持された被縫製物が縫い針とともに上昇しないように被縫製物を針板に押さえつける中押さえ29と、中押さえ29の下位置高さを調節する下位置高さ調節機構H1と、ユーザの入力により縫製パターンを設定する縫製パターン設定手段200と、ユーザの入力により下位置高さ調節機構H1を駆動させて中押さえ29の下位置高さを設定する下位置高さ設定手段200と、を備え、縫製パターン設定手段200及び下位置高さ設定手段200により設定された縫製パターン及び中押さえ29の下位置高さに基づいて縫製を行うミシン100において、縫製パターン設定手段200による縫製パターンの設定時に、下位置高さ設定手段200による中押さえ29の下位置高さを設定させる下位置高さ設定要求手段200を備える。
(もっと読む)
ミシン
【課題】 稼動休止中のミシンヘッドの針棒を停電時に下降させないようにしたミシンの提供。
【解決手段】 稼動休止中における針棒のジャンプ状態を機械的に保持する保持手段を具える。これにより、停電などの急な電源停止があったとしても、稼動を休止しているミシンヘッドの針棒はジャンプ状態がそのまま維持されて下降せず、従ってユーザの意図しない針棒の下降に伴って引き起こされ得る部品の変形や破損などを防止することができるようになる。
(もっと読む)
ミシン
【課題】縫製物の厚さの変化に対応できる縫いパラメータを自動的に切り替えるミシンを提供する。
【解決手段】押さえは、可動リンク機構2を介して駆動されて、縫製物を解放する上昇位置と縫製物16を押さえ付ける押さえ位置との間を移動可能である。厚さセンサ34を利用して、前記縫目形成地点の領域32外にある縫製物の厚さが検出される。位置センサ17により、前記押さえ位置にある前記押さえ22;28のベッド4に対する相対位置を検出する。前記位置センサ及び前記厚さセンサに信号伝送が行われるように接続19、35される制御装置20、43により、前記位置センサ及び前記厚さセンサの出力値に依存してミシン1の調整値を設定する。その結果、縫製物の厚さが変化する際、又は縫製物の種類が変化する際には、縫いパラメータに微細に適合化されたミシンの自動的な切換えがもたらされる。
(もっと読む)
鳩目穴かがりミシン
【課題】糸切り時における縫製対象物の位置ずれを確実に防止する。
【解決手段】縫製対象物CLが載置され、且つ鳩目穴の形状に沿って移動される送り台7と、送り台7に載置された縫製対象物CLに鳩目穴かがり縫目HNを形成する縫針と、この縫針による鳩目穴かがり縫目HNの形成位置を挟んで一方側及び他方側にそれぞれ設けられ、送り台7上の縫製対象物CLを押圧する一対の布押さえ51,52と、送り台7の一方側に下刃部材22が設けられ、その下刃部材22と上刃部材21との協働により鳩目穴かがり縫目HNから延出する糸を切断する糸切り装置20とを備えた鳩目穴かがりミシン1において、送り台7の一方側に設けられ、糸切り時に送り台7上の縫製対象物CLを押圧可能な補助押さえ18を有する
(もっと読む)
玉縁縫いミシン
【課題】縫い終わった生地を順次重ねていくにあたって、生地の位置が揃うようにすることができる玉縁縫いミシンを提供する。
【解決手段】玉縁縫いミシン1は、大押え17を搬送方向に移動させることで生地を前から後ろに送る布送り機構5と、生地に二本の縫い目を施す二本針ミシン本体7と、生地の端縁を検出するセンサ60と、生地を生地受けバー31に重ねるスタッカー機構9と、玉縁縫いミシン1全体を制御する制御装置70とを備える。制御装置70は、センサ60によって検出された生地の端縁を基準として、布送り機構5により搬送される生地の搬送位置又は搬送量を算出し、算出された搬送位置又は搬送量に基づいて布送り機構5を制御して、コーナーメス機構8による前記V字状切れ目の形成後、生地の端縁が揃うように生地をスタッカー機構9の排出位置に搬送する。
(もっと読む)
61 - 80 / 111
[ Back to top ]