
Fターム[3B150PA03]の内容
Fターム[3B150PA03]の下位に属するFターム
縫製開始時〜縫製中断前 (6)
縫製再開時〜縫製終了前 (5)
Fターム[3B150PA03]に分類される特許
1 - 20 / 104
ミシンの目飛び検出装置
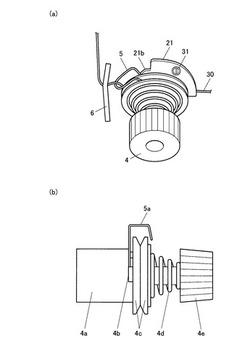
【課題】糸の太さ・種類等変わってもセンサ等の感度調整の必要がなく、ゴミ等の影響も受けずに、目飛びを検出する。
【解決手段】ミシン上軸に連結され、上下動する針棒11と、ミシン上軸に連動して回転し、針棒と協働して縫い目を形成する釜と、糸巻から天秤に至る経路上に配置され、上糸に張力を付与する糸調子器4と、その糸調子器に付設され、上糸張力を受けて初期位置Bと作動位置Aの間を揺動すると共に、糸掛け部を有する糸取りばね5と、を備えるミシンにおいて、糸取りばねが初期位置Bに位置するか否かを検出する検出手段と、その検出手段による糸取りばねの挙動検出に基づいて糸の目飛びを検出する制御手段と、を備える。制御手段は、天秤下死点から所定上軸角度(天秤下死点+60°)の範囲内にあって、検出手段21による糸取りばね5の初期位置の検出により目飛びと判断して、警告信号を出力するか、又はミシンの駆動を停止する。
(もっと読む)
ミシン及びミシンの制御方法

【課題】布送りモータの回動方向の切替頻度を減らし、且つ主軸の駆動と布送り機構の駆動の同期を保持することができるミシン及びミシンの制御方法を提供する。
【解決手段】ミシンは、縫針を上下動する主軸を駆動するメインモータと、布を送る布送り機構を駆動する布送りモータを備える。ミシンが備える動力伝達機構は、布送りモータの出力軸の一方向及び逆方向への夫々の回動動作を、布送り機構が水平に一往復揺動する揺動運動に変換して、布送りモータの動力を布送り機構に伝達する。ミシンのCPUは、メインモータの出力軸の回転角である主回転角を検出する(S11)。CPUは布送りモータの出力軸の回転角である布送り回転角を検出する(S13、S19)。CPUは、布送りモータに指示する回転速度を、主回転角と布送り回転角を用いて算出する(S16、S22)。
(もっと読む)
裁縫機及びその駆動制御方法
【課題】本発明は、回転可能なヘッドを備える裁縫機を提供するためのものである。
【解決手段】本発明の回転可能なヘッドを備える裁縫機は、上記裁縫機を支持固定できるように多数の支持ポストと支持バーを用いてボックス形態に形成される裁縫機フレーム、上記裁縫機フレームの上に載置される裁縫機本体、上記裁縫機本体の先端部に設置されて、ヘッド部回動手段を用いて回動可能に形成されるヘッド部、上記ヘッド部の下部に設置されて、ベッド部回動手段を用いて回動可能に形成されるベッド部、上記裁縫機フレームの上に載置された上記裁縫機本体をX軸方向に移送させるX軸移送手段、上記裁縫機フレームの上に載置された上記裁縫機本体をY軸方向に移送させるY軸移送手段、及び上記裁縫機フレームの前面部に備えられて作業対象である被縫製物が支持固定される裁縫物固定フレームを含む。
(もっと読む)
ミシン
【課題】ヒッチステッチを防止する。
【解決手段】針棒12を上下動軸心周りに回動させる針棒回動機構30と、針板の下側で糸寄せ部材51により下糸の糸寄せを行う糸寄せ機構50と、被縫製物を水平面に沿って任意の移動方向に移動させて任意の位置に針落ちを行わせる布移動機構80と、縫製データに基づいて布移動機構を制御する制御部90とを備え、当該制御部は、前記移動機構による各針落ちごとの前記被縫製物の移動方向が予め定められた第一の角度範囲である場合には糸寄せ機構による糸寄せを実行し、移動方向が予め定められた第二の角度範囲である場合には針棒回動機構による針棒の回動を実行する。
(もっと読む)
ミシン
【課題】布送り機構の水平方向の動作と主軸の回転を別のモータで駆動する場合に、電力供給停止時の不具合の発生を防止することができるミシンを提供する。
【解決手段】ミシンは、縫針を上下動する主軸を駆動するメインモータと、布を送る布送り機構を駆動する布送りモータを備える。ミシンの平滑回路は、メインモータの減速時に生じる回生電力を布送りモータに供給することができる。ミシンは、外部電力の供給がある場合(S11:YES)、メインモータと布送りモータが同期するよう2つのモータを駆動する(S13,S14)。縫製の実行中に外部電力が閾値未満に低下すると(S11:NO)、ミシンは、メインモータと布送りモータの同期を保持しつつ、メインモータの回生電力で布送りモータを駆動し(S23)、2つのモータを停止する(S26)。
(もっと読む)
ミシン及びミシン制御プログラム
【課題】モータのトルク指令値を算出するためのゲイン値を駆動状況に応じて増減することができるミシン及びミシン制御プログラムを提供する。
【解決手段】ミシンのCPUはミシンモータに対する回転速度の指令値Sを取得する(S11)。CPUはミシンモータの回転速度の検出値Nをエンコーダにより取得する(S12)。指令値Sと検出値Nの偏差ΔNを算出する(S13)。CPUはミシンの駆動状況に応じた増減割合で、ミシンモータのトルク指令値Tを算出するためのゲイン値を偏差ΔNの増減に従って増減する(S14〜S17、S21〜S25)。CPUは設定したゲイン値に偏差ΔNを乗じてトルク指令値Tを算出する(S29)。
(もっと読む)
ミシン
【課題】ミシンベッドが大型化することなく、縫製の不具合を早期に検知できるミシンを提供する。
【解決手段】ミシン1は、加工布を載置するミシンベッド2と、ミシンベッド2の内部に設けられ加工布を所定の送り方向に移動させる布送り機構と、ミシンベッド2に設けられ加工布の下面の第一範囲を撮像する第一撮像手段と、加工布の下面の第一範囲とは異なる第二範囲を撮像する第二撮像手段とを備え、第一撮像手段および第二撮像手段により撮像された送り方向に移動する加工布の下面のそれぞれの画像を合成し、合成された合成画像を表示部7に表示する。
(もっと読む)
ミシン
【課題】ミシンの所定の給脂箇所に給脂が必要な時期が近づいたこと、あるいは、給脂が必要な時期となったことを、使用者に精度よく知らせる。
【解決手段】上下動する縫針を有し布地を縫製するための駆動機構を備えたミシンにおいて、布地の移動量を積算するステップSS140の手順と、模様縫いミシン1の給脂箇所である2対のスライドベアリング51,60に対する給脂に関する報知を行う表示部7aと、ステップSS140の手順が積算した移動量に応じて、表示部7aの制御を行う処理とを有する。
(もっと読む)
ミシン
【課題】イサリ量を低減する。
【解決手段】搬送される上布CUと下布CDの終端部をそれぞれ検出する上布と下布の検出手段91、81と、送られる上布のみを押圧する上布送り調節機構9と、送られる下布のみに押圧力を付与する下布送り調節機構5と、布送り機構の送り量と各検出手段の検出タイミングとによりイサリ量を算出する終端部位置算出部51と、イサリ量とそのイサリ量を生じた時の上布と下布の押圧力の差とを対応づけて記録する記録部54と、記録部の二以上の縫製によるイサリ量と上布と下布の押圧力の差との記録から適正な上布と下布の押圧力の差を求め、それ以降の縫製時に適正な上布と下布の押圧力の差を生じるように上布送り調節機構又は下布送り調節機構とを制御する調節制御部51とを備えている。
(もっと読む)
ミシン
【課題】手縫い風縫目を縫製対象物に良好に形成することができるミシンを提供すること。
【解決手段】糸調子調整手段と、移送手段とを備え、上糸とは異なる色の下糸を用いて、上糸と下糸とが交絡する縫目を縫製対象物に形成するミシンにおいて、糸調子調整手段及び移送手段が制御され、上糸と下糸との交絡点が縫製対象物の上面よりも下部にある縫目のみを含む第1縫目と、上糸の張力によって交絡点及び下糸が縫製対象物の上面に引き出された縫目を含み、下糸が第1方向に引き出された部分である第1部分と、下糸が第2方向に引き出され且つ少なくとも一部が第1部分と重なる部分である第2部分とが複数組含まれる縫目である第2縫目とが、縫製対象物に交互に配置される(S70,S80、S90)。
(もっと読む)
ミシン
【課題】心地よさおよび温かさを感じさせ得る縫い目が得られるミシンを提供する。
【解決手段】ミシンは、針12を装着可能な針棒11と、送り方向における縫製対象物の送り量と送り方向に直交する方向において縫製対象物に対する針12の相対的な振れ幅量とを制御可能な制御装置とを有する。縫製対象物の縫い目における下手および上手の程度を調整するへたうまモードを実行する指令を制御装置に出力するへたうま選択要素10が設けられている。へたうま選択要素10は、針12の振れ幅量および縫製対象物の送り量をそれぞれ設定値として設定すると共に、振れ幅量および送り量のうちの少なくとも一方を設定値に対してばらつかせる指令を制御装置に出力する。
(もっと読む)
ミシンの糸供給器
【課題】縫い始めの余分な糸の長さを短くできる、コストを節減したミシンの糸供給器を提供する。
【解決手段】ミシンの糸供給器上には、動力ユニット70を設置し、糸通過軸ユニット30を押して動かし、撥板40の動作を連動し、撥板40が糸挟持ユニット20に分け入り開かせる時、支点と糸掛け板60との間の糸は最も短くなり、また最もスムーズとなり、撥板40が糸挟持ユニット20から退出すると、糸挟持ユニット20はミシン糸1を緊密に挟持し、動力ユニット70は糸通過軸ユニット30を継続して押し、ミシン糸1の張りを締め、支点と糸掛け板60との間の糸は長くなり、糸挟持ユニット20はミシン糸を緊密に挟持する。
(もっと読む)
多針式ミシン
【課題】チューブに糸を通す面倒な作業を要することなく、糸絡みを防止する。
【解決手段】針棒ケース5は針棒ケース移動機構16により移動される。糸案内部46a〜46jを所定間隔で有する糸案内部材39は、支柱24の上端部に上下動可能に設けられ、針棒ケース5には糸を夫々前記複数の針棒側へ導入するための複数の糸導入口13a〜13jが設けられている。上下動機構49は針棒ケース5の移動に伴う糸導入口13a〜13jの移動時に、対応する同士の各糸案内部46a〜46jと前記各糸導入口13a〜13jとの距離がほぼ一定となるように前記糸案内部材39を上下動させる。
(もっと読む)
ミシン
【課題】布送り方向に沿った布端に沿って適切に縫い目を形成する。
【解決手段】針板14上の被縫製物C1,C2に下方から接して送り動作を行う送り歯1と、被縫製物に上方から接する押さえ足19と、送り歯による送り方向に交差する方向について被縫製物の縫い目に沿った端部の位置を移動調節する端部調節機構と、被縫製物の端部が所定位置にあるか否かを検知する検知手段24,25と、端部調整機構を、検知手段が端部ありと検知した場合に検知手段から離れる方向に移動制御し、検知手段が端部なしと検知した場合には、当該検知状態が継続する時間又は送り距離について定めた閾値を超えるまで端部なしの検知が継続した場合に、被縫製物が検知手段から離れる方向に移動するよう制御を行う制御手段13とを備えている。
(もっと読む)
縫製装置の目飛び糸切れチェック装置
【課題】目飛びの検出を簡素な構造でコスト的に有利に実現でき、目飛びや糸切れの検出精度が向上し、良好な作業効率となり生産性の向上に寄与する縫製装置の目飛び糸切れチェック装置の提供。
【解決手段】所定長さDの弛み部分の位置を検出装置8により検出する構成のため、弛み部分の位置が目飛びSや糸切れの有無に確実に対応し、目飛びSや糸切れの検出を誤ることなく高い精度で実現し、目飛びや糸切れ現象を確実に判別することができる。検出装置8は、上糸3に張力を付与できるだけの簡易なエア供給装置19と検出手段としての光電スイッチ23から成る。
(もっと読む)
玉縁縫いミシン
【課題】布地の切断動作を安定して行う。
【解決手段】ミシンモータを駆動源とする針上下動機構と、送りモータを駆動源とする布送り機構と、固定メスに対してメスモータによりセンターメスを上下動させて直線切れ目を形成するメス機構と、被縫製物の搬送速度に応じて定まるセンターメスの上下動頻度に従ってメスモータを制御する動作制御手段とを備え、メスモータの動作速度を検出する検出手段を備え、動作制御手段が、メスモータの指令値に対して検出手段の検出する動作速度が規定値以上の低下を生じた場合に、ミシンモータ及び送りモータを減速させる制御を行うことを特徴とする。
(もっと読む)
繊維強化複合材料用プリフォームの縫合装置及び縫合方法
【課題】幅が変化する形状のプリフォームの場合にも生産性を向上できるようにする。
【解決手段】移送方向Rへのプリフォーム11の移送に伴い、作業幅領域S1に対応するプリフォーム11の幅(移送方向Rと直交する方向のプリフォーム11の長さ)が変化して(作業幅領域S1の幅が変化して)或るステッチ針16が作業幅領域S1から外れた場合、第1支持ブロック15及び第2支持ブロック20が下動されてステッチ針16及び第1接触プレート211が実線で示す作業位置から鎖線で示す退避位置に切り換え配置される。又、糸ガイド33が実線で示す作業位置から鎖線で示す退避位置に切り換え配置されると共に、第2接触プレート411が実線で示す作業位置から鎖線で示す退避位置に切り換え配置される。
(もっと読む)
ミシン
【課題】縫製中でも自在に糸張力を補正する。
【解決手段】縫い針を上下動させる針上下動機構と、縫い針に対して被縫製物を相対的に位置決めする位置決め機構と、糸張力を縫い糸に付与する糸調子装置と、縫製データに基づいて位置決め、糸張力付与及び縫製速度の制御を行う動作制御手段1000とを備え、縫製データ71aに基づく縫製の実行中に当該データに定められた糸張力に対して縫製パターンの全針に及ぶ補正データの入力を受け付ける糸張力補正手段74を備え、動作制御手段は、糸切りを伴うことなく、入力直後の縫い目から補正データに応じた糸張力で縫製を行うことを特徴とする。
(もっと読む)
ミシン
【課題】フリーモーション縫製を簡単な操作によって実行させる機能を備えたミシンを提供すること。
【解決手段】移送手段と、縫製手段とを備えるミシンにおいて、単位縫目を形成するためのデータである単位データが生成される(S70又はS75)。S50で操作手段によって出力された出力信号と、S70又はS75で生成された単位データとに応じて、加工布の移送方向及び移送量を指示する座標データを含む縫製データが作成される(S105)。S105で作成された縫製データに従って、移送手段が駆動され、加工布を移送させるとともに、縫製手段が駆動され、加工布に単位縫目が形成される(S110)。
(もっと読む)
ミシン
【課題】フリーモーション縫製によって所望の形状の縫目を簡単な操作によって形成させる機能を備えたミシンを提供すること。
【解決手段】ミシンは、移送手段と、縫製手段と、操作状態に応じて、1つ以上の縫目によって構成される単位縫目を指定する第1出力信号を出力する第1操作手段と、操作状態に応じて、加工布に単位縫目を形成する位置を指示する第2出力信号を出力する第2操作手段とを備える。第1操作手段によって出力された第1出力信号と、第2操作手段によって出力された第2出力信号とに基づき、単位縫目が縫製される位置を指示する座標データを含む縫製データが作成される(S85からS105)。S105で作成された縫製データに従って、移送手段が駆動され、加工布が移送される。また、縫製手段が駆動され、加工布に単位縫目によって構成される縫目が形成される(S110)。
(もっと読む)
1 - 20 / 104
[ Back to top ]