
Fターム[3C002HH01]の内容
工作機械における自動工具交換 (1,802) | 工具交換における計測、制御、安全 (156) | 工具交換における制御 (65)
Fターム[3C002HH01]の下位に属するFターム
工具貯蔵マガジンの回転速度制御 (2)
工具貯蔵マガジンの位置決め割出し (13)
主軸と工具の駆動キーのキー合せ (2)
Fターム[3C002HH01]に分類される特許
1 - 20 / 48
数値制御装置及び制御方法
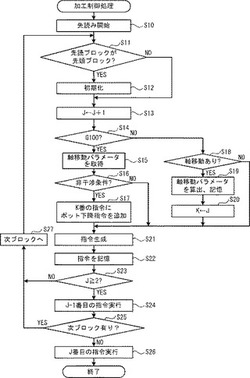
【課題】工具が被加工物やジグに干渉しない場合のみ工具を待機位置まで工具交換前に移動できる数値制御装置及び制御方法を提供する。
【解決手段】CPUは加工プログラム中に軸移動指令がある場合、主軸ヘッドの軸移動パラメータを算出しRAMに記憶する(S19)。軸移動パラメータは次工具の送り軸毎の最小座標値と最大座標値である。加工プログラム中に工具交換指令がある場合、工具交換前の軸移動を指示するブロックの軸移動パラメータをRAMから取得する(S15)。工具が被加工物又はジグ装置に干渉する領域を示す干渉パラメータは不揮発性記憶装置に記憶されている。干渉パラメータに基づき、軸移動パラメータが非干渉条件を満たすか否か判断し(S16)、非干渉条件を満たす場合(S16:YES)、工具交換前の軸移動指令にポット加工指令を追加する(S17)。
(もっと読む)
立形マシニングセンタ

【課題】工作機械のサイズを大きくすることなく、テーブルの上方空間を広く開放して、段取り作業中にワークなどが主軸頭と干渉しないようにした立形マシニングセンタを提供する。
【解決手段】ベッド3の加工領域外の工具交換位置に主軸頭9を移動させて工具交換を行う工具交換装置20と、ワークの段取りを行うための段取りモードが選択されたとき、主軸頭9を工具交換領域に移動させる段取機能を有する制御装置26とを具備する。
(もっと読む)
工作機械及びモータ制御方法
【課題】カム機構を駆動するモータに必要以上の電流が流れることを防止でき、モータの温度上昇を防止することができる工作機械及びモータ制御方法を提供する。
【解決手段】マシニングセンタの制御装置60は、工具交換動作において工具交換アーム30を垂直移動させる高負荷動作の場合に、リレー93を切り替えて抵抗Rが無い経路を選択し、工具交換モータ27へ高電流を通電する。また制御装置60は、工具交換アーム30を旋回させる低負荷動作の場合に、リレー93を切り替えて抵抗Rが有る経路を選択し、工具交換モータ27への電流を低減する。また制御装置60は、高負荷動作と低負荷動作との切替タイミングを予め切替タイミングテーブルとして記憶しておき、工具交換動作の開始からの経過時間をタイマにて計時して、経過時間が切替タイミングに達した場合にリレー93の切り替えを行う。
(もっと読む)
超音波加工機の自動工具交換装置
【課題】低コストかつ小型の超音波加工機の自動工具交換装置の提供。
【解決手段】加工工具3が取り付けられる加工工具ホルダ4と、加工工具ホルダ4を保持するホルダ受け穴が複数設けられたツールストッカ5と、軸線回りに回転駆動されるスピンドルと、スピンドルに形成された中空の本体スリーブの中に配置される超音波振動子と、超音波振動子に同軸上に連接され、かつ本体スリーブの内周壁に拘束固定され、超音波振動子により励起された超音波振動を、加工工具ホルダを通じて加工工具へ伝達する支持ホーンとを含む超音波スピンドルユニット2とを有し、加工工具ホルダ4は、側胴部にツールストッカ5のホルダ受け穴内で回転を拘束される回転拘束部を有し、ツールストッカ5のホルダ受け穴内に保持された状態でスピンドルの回転により支持ホーンに対してねじにより着脱される。
(もっと読む)
工作機械
【課題】、工具交換の時間を短縮して、加工の生産性を向上できる工作機械を提供する。
【解決手段】工具交換動作を開始すると先ず、主軸オリエント動作が行われると同時に、主軸ヘッドは、加工位置からZ軸原点までZ軸最高速度で上昇する(S11)。主軸オリエント動作が完了した場合は(S12:YES)、主軸ヘッドは、Z軸原点から工具交換を行うATC原点までZ軸ATC上昇速度で上昇する(S13)。主軸ヘッドがATC原点(Z615)まで到達すると(S13)、マガジンモータが駆動され、工具マガジンが旋回し、工具交換が行われる(S14)。次いで、主軸ヘッドは、ATC原点からZ軸原点まで前記Z軸最高速度と同じ速度で下降する(S15)。次いで、Z軸原点からワークの加工開始位置までZ軸最高速度で下降し(S16)、工具により、ワークの加工が行われる。
(もっと読む)
加工装置及び三次元加工装置
【課題】比較的簡単な構成で工具の取替え等が可能であり、生産性を向上することができ、低コスト化を図ること。
【解決手段】 加工対象物が取り付けられる加工台11と、加工台11に取り付けられた加工対象物を加工する工具Tを把持する把持部42及び当該把持部42を開閉する開閉レバー43を有する主軸40と、主軸40と加工台11とを相対的に三次元方向に移動させる三次元移動手段と、主軸40の移動経路又はその近傍に設けられて、主軸40の移動に伴って開閉レバー43を衝突させる被衝突部材60とを有し、開閉レバー43は、衝突部材60に衝突されたことにより、把持部42を開状態又は閉状態とする。
(もっと読む)
工作機械及び工具交換方法
【課題】重い工具の移動の際に発生する衝撃を抑制することができると共に、現工程の加工と次工程の工具の移動とを並行して行って、工具交換に要する時間を短縮することができる工作機械及び工具交換方法を提供する。
【解決手段】工具情報テーブルに各工具の重量情報を記憶しておく。マシニングセンタは、工具交換を行う際に工具情報テーブルを読み出して次工程の工具が標準工具又は重い工具のいずれであるかを判断し、工具マガジンにて次工程の工具を収容位置から交換待機位置へ移動する際に、標準工具を高速で移動し、重い工具を低速で移動する。これにより工具の移動に伴う衝撃を抑制することができ、主軸に装着された工具による加工と、工具マガジンにおける工具の移動とを並行して行うことができる。
(もっと読む)
工作機械及び制御方法
【課題】大径工具と交換アームとの接触を回避し、工具を交換する時間を短縮する工作機械及び工具を交換する動作を制御する制御方法を提供する。
【解決手段】加工軸9に装着された工具24及び工具ポット31に格納された工具24がいずれも標準工具である場合に、工具ポット31が交換アーム18に接近する動作と加工軸9(軸台3)が交換位置に移動する動作とを並行的に実行する。標準工具は小型なので交換アーム18に接触せず、交換時間を短縮することができる。
(もっと読む)
工作機械及び工具交換方法
【課題】工具交換の際に加工軸及び工具交換アーム等と工具との干渉を避けることができると共に、工具交換に要する時間を短縮することができる工作機械及び工具交換方法を提供する。
【解決手段】工具情報テーブルに各工具が標準工具又は大径工具のいずれであるかを記憶しておく。マシニングセンタは、工具交換を行う際に工具情報テーブルを読み出して次工程の工具が標準工具又は大径工具のいずれであるかを判断し、工具マガジンにて次工程の工具を収容位置から交換待機位置へ移動する際に、標準工具を高速で移動し、大径工具を低速で移動する。これにより工具交換の際の大径工具及び工具交換アームの干渉が回避でき、主軸ヘッド及び工具交換アーム等の交換位置への移動と、次工程の工具の交換待機位置への移動とを並行して行うことができる。
(もっと読む)
工具交換装置
【課題】工具交換時間を効果的に短縮し、工具交換時間を含めた加工所要時間の短縮を図ることが可能な工具交換装置を提供することを目的とする。
【解決手段】工具3を保持して循環移動する複数の工具ポット6を有する工具マガジン4と、主軸20を支持する主軸ヘッド2に設けた交換アーム5とを備える工具交換装置において、循環移動により割出位置に位置決めした工具ポット6を、工具ポット6の揺動により、割出位置と交換位置との間の中間位置に位置決めできるようにし、前工具での加工中に次工具を中間位置に移動させておく。
(もっと読む)
工具交換装置
【課題】交換アームの動作前の待機時間を適正化し、工具交換時間を含めた加工所要時間を短縮することが可能な工具交換装置を提供することを目的とする。
【解決手段】工具3を保持して循環移動する複数の工具ポット6を有する工具マガジン4と、主軸20を支持する主軸ヘッド2に設けてあり、主軸ヘッド2と共に上昇、下降する交換アーム5とを備える工具交換装置において、工具マガジン4の下部で交換位置に工具3が移動した後、この工具3に対応させて定めた待機時間の経過を待って交換アーム5が動作し、工具ポット6と主軸20との間で工具3を交換するように構成する。
(もっと読む)
ロボットおよびワーク加工システム
【課題】加工装置にワークおよび加工ユニットを着脱するロボット、およびそれを用いたワーク加工システムを提供する。
【解決手段】中空ワークWを回転駆動する主軸21を回転可能に支持した主軸台11と、主軸台に対向して配設された心押台12と、工具42、52を径方向に移動可能に保持した加工ユニット40、50と、主軸台と心押台に進退移動可能に設けられ中空ワーク内に挿入された加工ユニットを両側より回転不能に挟持する一対のユニット保持アーバー25、31と、一対のユニット保持アーバーの協働により加工ユニットを軸線方向に移動させる軸線方向移動手段48と、一方のユニット保持アーバー内を通して工具を径方向に移動させる径方向移動手段47とによって構成された中空ワーク内面加工用の加工装置に用いるロボット140で、ロボットは、加工装置に中空ワークおよび加工ユニットを着脱するものである。
(もっと読む)
工作機械及び工具交換方法
【課題】加工軸に装着する工具を、大径工具から標準工具に短時間で交換することができる工作機械及び工具交換方法を提供する。
【解決手段】標準工具(4番)による加工が終了した後、加工軸9に装着した標準工具(4番)を標準工具(6番)に交換する。工具マガジン10を回転し、大径工具(5番)を開口10bに位置決めする。標準工具(6番)を大径工具(5番)に交換する。大径工具(5番)による加工を行う。標準工具(6番)は大径工具(5番)の工具ポット31に収容される。標準工具(6番)は開口10bに位置決めされる。大径工具(5番)による加工が終了した後、大径工具(5番)から標準工具(6番)に交換する。
(もっと読む)
数値制御工作機械、制御プログラム及び記憶媒体
【課題】工具交換サイクルを短縮できる数値制御工作機械、制御プログラム及び記憶媒体を提供する。
【解決手段】制御装置のCPUは、加工ブロックの1ブロックを読み込んで解釈する(S1)。このS1の処理では、CPUは、タイミングテーブルを参照して、各指令の内容と、実行タイミングを読み取り、タイミング順に指令の内容を並び替えて、制御装置のRAMに記憶する。CPUは、指令が工具交換指令と判断した場合(S3:YES)、工具交換動作を開始する(S4)。ここで、CPUは、Z軸上昇処理を実行する。Z軸上昇処理は、主軸ヘッドが現在位置から工具交換位置(ATC原点)まで上昇する処理である。主軸ヘッド7がR点まで上昇した場合に(S5:YES)、S1の1ブロック読み取り処理でRAM73に記憶した指令の内容にタイミングAで実行する指令がある場合には(S6:YES)、当該タイミングAで実行する指令の内容を実行する(S7)。
(もっと読む)
工具管理機能を備えた数値制御装置
【課題】 複数の工具マガジンで工具管理を効率よく行い、工作機械の加工待ち時間を短縮できる数値制御装置を提供する。
【解決手段】 数値制御装置は、加工プログラム中の次工具指令を実行し、工具番号を識別し、工具番号に対応するポット番号を検索し、ポット番号に対応するマガジン番号を識別する。次工具が格納されている方のマガジンの状態を検知し、そのマガジンが工具を割出可能な状態であるか否かを判定し、割出可能であれば、そのマガジンに割出指令を出力する。マガジン工具交換作業中につき、マガジンが割出不能な場合は、次工具と同じ工具グループに登録されている代替工具番号を検索し、代替工具を格納するマガジンに割出指令を出力する。
(もっと読む)
工作機械の工具交換装置
【課題】加工プログラムの編集や工具の差替えを必要とせず、また装置の構造が複雑化することもなく、加工プログラムで指定された通りの加工を確実に行うことができる工作機械の工具交換装置を提供する。
【解決手段】
加工プログラムO0001で指定されたプログラム内指定工具T0001と、加工プログラムで指定された加工内容に即して実際に使用する実使用工具とT0003の対応関係を示す工具対応表Aを備え、該工具対応表Aを用いてプログラム内指定工具に対応する実使用工具を求め、該実使用工具を前記次工程工具に決定する。
(もっと読む)
工作機械
【課題】回転工具の加工部が摩耗しても、この回転工具の加工部の拡縮を無人で行える構造を実現する。
【解決手段】
制御器19を構成する測定制御手段28により孔の加工精度を測定し、この測定値に基づき前記回転工具の加工部の拡縮の要否を、拡縮要否判定手段29により判定し、拡縮が必要と判定した場合に、拡縮制御手段30により自動的に前記回転工具の加工部を拡縮する。
(もっと読む)
特殊工具による工作機械加工方法と工作機械加工システム
【課題】工具マガジンの工具保持ポッドに収容できない特殊工具を用いて1つのラインで加工を行えるようにした。
【解決手段】工作機械加工システム1は、ワークを搭載するパレット4を搬送手段5に設置して搬送ライン3を搬送させてマシニングセンター7の主軸に装着する。マシニングセンター7にはワーク加工用の工具を収納する工具マガジンを設けた。工具保持ポッドに収納できない特殊工具を取り付けた特殊工具搭載パレット4Aをワークパレット4と共にパレットストッカ12に保管する。ワーク加工制御手段における加工プログラムの制御コードで特殊工具搭載パレット4Aを呼び出して搬送手段5に移送し、マシニングセンター7に搬送して回転テーブルに搭載する。マシニングセンター7に装着した特殊工具によってワークを加工し、終了後に特殊工具搭載パレット4Aをパレットストッカ12に戻す。
(もっと読む)
工具配置算出装置、工具配置算出方法、制御プログラム及び記憶媒体
【課題】加工プログラムにおける工具交換時間の短縮を図ることができる工具配置算出装置、工具配置算出方法、制御プログラム及び記憶媒体を提供する。
【解決手段】数値制御装置は、工具組合せ記憶エリアに記憶している工具組合せCと組合せ回数CNとに基づいて、組合せ回数CNが複数である工具Tについて工具ポットPの特定を行う(S60)。その後、数値制御装置は、工具使用回数記憶エリアに記憶している工具使用回数TNが複数である工具Tについて工具ポットPの特定を行う(S70)。その後、数値制御装置は、1回のみ使用する工具Tについて工具ポットPの特定を行う(S80)。数値制御装置は、工具組合せCの組合せ回数CNが複数回数である場合及び工具使用回数TNが複数回数である場合に優先的に隣接する工具ポットPに工具Tを特定することで、工具交換時に工具マガジンの切替回数を減らすことができる。
(もっと読む)
自動工具交換装置を備えた工作機械におけるタイミング調整方法
【課題】工具交換時における旋回アームの旋回動作とドローバーのスライド動作とのタイミングを容易、且つ、正確に調整することができ、主軸や工具等に負荷をかけることなく工具交換に係る工程の時間短縮を実現することができるタイミング調整方法を提供する。
【解決手段】測定器CH1、CH2を用いてドローバー6の前後位置及び旋回アーム4の位置を測定するとともに、当該測定結果をモニタに表示し、表示されている測定結果にもとづきながらドローバー6をスライドさせるタイミング等を調整することができるようにした。したがって、タイミングの調整に係り十分な経験を有していない作業者であっても、該タイミングを容易且つ迅速に調整することができる。
(もっと読む)
1 - 20 / 48
[ Back to top ]