
Fターム[3C007AS07]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 組立 (282) | 嵌合 (72)
Fターム[3C007AS07]に分類される特許
1 - 20 / 72
ロボットシステム
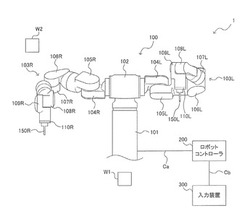
【課題】対象物を固定しつつ旋回が必要となる作業を1台のロボットで行うことができるようにする。
【解決手段】ロボットシステム1は、ロボット100と、このロボット100の動作を制御するロボットコントローラ200とを備えている。ロボット100は、先端にツール150L,150Rを備えた2つのアーム103L,103Rと、これら2つのアーム103L,103Rを支持し、旋回させる胴体部120とを有している。ロボットコントローラ200は、2つのアーム103L,103Rのうち、少なくとも1つのアーム103の先端に備えられたツール150が旋回の前後を通じて同一の位置及び姿勢に保持されるように、ロボット100を制御する。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法

【課題】物体の位置を高速に且つ高精度に検出する。
【解決手段】位置検出装置30は、微細な軸穴とこの軸穴を含むマーカーとを設けたオブジェクトを含む画像データを取得する画像データ取得部31と、マーカーをゴール位置に対応付けたマーカーゴール画像データを記憶するマーカーゴール画像記憶部32と、軸穴の軸中心をゴール位置に対応付けたターゲットゴール画像データを記憶するターゲットゴール画像記憶部36と、マーカーゴール画像データを用いて、画像データ取得部31が取得した画像データからマーカーを検出するマーカー検出部33と、ターゲットゴール画像データを用いて、画像データ取得部31が取得した画像データにおける、マーカー検出部33が検出したマーカー内から軸穴を検出するターゲット検出部37とを備えた。
(もっと読む)
探索装置、自動組付け装置、探索方法、およびプログラム
【課題】部品のワークへの組付け位置を精度よく探索できる探索装置を提供する。
【解決手段】ワークは、バカ穴とバカ穴の底面に形成されたネジ穴とを有する。探索装置は、ネジと底面とを接触させた状態で、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを移動させる。探索装置は、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを各々移動させたときに反力が閾値Th1以上となる位置Pα,Pβ,Pγ,Pδを特定する。探索装置は、位置Pαと位置Pβとの間の距離が閾値Th2未満の場合には、位置Pαと位置Pβとの中間位置を起点としたv軸方向への移動と、位置Pγおよび位置Pδの特定とを実行する。探索装置は、位置Pγと位置Pδとの間の距離が閾値Th2未満の場合には、位置Pγと位置Pδとの中間位置をネジの組付け位置と判断する。
(もっと読む)
自動組立システムおよび自動組立方法
【課題】要求される組立精度より繰り返し位置精度が大きい場合であっても、自動で部品組付けを行う。
【解決手段】第2部品画像に基づいて、組付け部位の位置を認識する第2部品認識手段と、組付け部位の位置に第1部品51を移動させる部品移動手段と、部品移動手段により移動された第1部品51を第2部品52に組付ける組付実施手段と、組付けが成功したかを判断する組付判断手段と、組付けが失敗した場合に、突き当て画像に基づいて、第1部品51の位置を認識する第1部品認識手段と、組付け部位の位置および第1部品51の位置に基づいて、第1部品51に対する位置補正量を算出する補正量算出手段と、位置補正量に基づいて、第1部品51を移動させる部品位置補正手段とを備え、組付実施手段は、部品位置補正手段により移動された第1部品51を第2部品52に組付ける。
(もっと読む)
作業の良否判定システム及び良否判定方法
【課題】ロボット1等の機械装置においてワークの保持部近傍の大型化やケーブル数の増加を抑制するとともに、センサ等の故障を防止する。
【解決手段】ロボット1等の機械装置におけるワークの保持部(例えばチャック8)と、その支持部(例えば手首部6)との間に可動部(例えばコンプライアンス装置7)を設け、作業に伴う保持部及び支持部の位置の変化からその良否を判定する。例えば、可動部の保持部側及び支持部側の部材に夫々マーカーMを設けて、カメラ11により撮影した画像中のマーカー位置を画像処理により検出し、保持部及び支持部の間隔の変化から作業の良否を判定する。
(もっと読む)
ロボットハンド
【課題】種々の大きさや形状の部品を十分な把持力で把持することが可能なロボットハン
ドを提供する。
【解決手段】互いの距離を変更可能に設けられた複数の指部の間で対象物を把持する動作
を行うロボットハンドにおいて、複数の指部の間に、指部の根元側と指部の先端側とを結
ぶ方向に沿って移動可能な掌部を設けておく。こうすれば、複数の指部の間に対象物を把
持するとともに、把持した対象物に掌部を当接させることができる。従って、対象物と複
数の指部との間に生ずる摩擦力と、掌部が対象物を支持する力とによって、種々の大きさ
や形状の対象物を十分な把持力で把持することが可能となる。
(もっと読む)
コンプライアンス装置及びこれを備えたロボットアームの構造
【課題】ロボットのアーム等に用いてワーク(例えばボルト)を適度に押し出しながら、その位置ずれを吸収できるコンプライアンス装置を、低コストにて提供する。
【解決手段】ワークを保持する保持部(例えばチャック)と、これを支持するアームとの間に介設するコンプライアンス装置7は、一対のブラケット70,71と、その一方を貫通して、当該一方のブラケット70を他方のブラケット71に対し近接/離遠するよう、スライド可能に支持するガイドシャフト72とを備える。両ブラケット70,71に互いに離遠するように付勢力を付加する付勢手段(例えばコイルばね73)を備える。ガイドシャフト72に括れ部72bを設け、ここにおいて一方のブラケット70がガイドシャフト72と直交する方向にも変位可能とする。
(もっと読む)
組立ロボットとその制御方法
【課題】単一のワークを複数の動作で対象物に組み付ける際に、各動作における条件の変化を考慮して、各動作においてその成功又は失敗を逐次判定することができる組立ロボットとその制御方法を提供する。
【解決手段】単一のワーク1を複数の動作で対象物2に組み付ける組立ロボット10であって、外力を計測する力センサ14を有しワークを把持するロボットハンド12と、ロボットハンドを3次元空間内で位置と姿勢を移動可能なロボットアーム16と、各動作におけるワークの動作条件を記憶しロボットアームを制御するロボット制御装置20とを備える。ロボット制御装置20により、各動作において、ワーク1の位置と計測された外力を動作条件と照合し、各動作の成功又は失敗を判断する。
(もっと読む)
組立ロボットとその制御方法
【課題】画像センサを用いずに、ワークと中間部材の嵌合状態を判断することができる組立ロボットとその制御方法を提供する。
【解決手段】外力を計測する力センサを有しワークを把持するロボットハンドと(S1)、ロボットハンドを3次元空間内で位置と姿勢を移動可能なロボットアームと、ロボットアームを制御しワークに嵌合された中間部材を対象物に嵌合させる組立作業を実行するロボット制御装置とを備える(S2)。ロボット制御装置により、組立作業中のワークの位置と計測された外力から組立作業の成功又は失敗を判断し(S3)、組立作業が失敗であるときに、ワークを組立作業前の位置へ戻し(S4)、次いで、中間部材が嵌合不能な固定部材5に対して固定部材を仮想的に対象物とみなして組立作業を再実行し(S5)、再実行中のワークの位置と計測された外力からワークと中間部材の嵌合状態を判断する(S6)。
(もっと読む)
部品組み付け装置及び機械部品の製造方法
【課題】機械部品の取り付け孔にボルトを挿入することが可能な部品組み付け装置及び機械部品の製造方法を提供する。
【解決手段】磁石66を用いてボルトの頭を保持する穴65が形成されたボルト保持部58を有する多関節ロボット11bを備え、
多関節ロボット11bが、ボルト保持部58に保持されたボルトの先端部を被固定部品Aに載せられた固定部品Cの取り付け孔に挿入し、ボルトを傾けて、ボルト保持部58からボルトを分離する。
(もっと読む)
位置および姿勢の補正機構
【課題】高速に動作可能である、位置および姿勢の補正機構を提供する。
【解決手段】減速機を介さない複数のリニアモータ101A〜Fの組み合わせによって構成されるリンク機構と、複数のリニアモータ101A〜Fのそれぞれの位置を測定するリニアエンコーダ120A〜Fと、複数のリニアモータ101A〜Fのそれぞれに流れる電流値を測定する電流センサ110A〜Fと、リニアエンコーダ120A〜Fにより測定された上記位置および電流センサ110A〜Fにより測定された電流値が入力される制御部130とを備えている。制御部130は、算出された上記力と入力された複数のリニアエンコーダ120A〜Fのそれぞれの位置に基づいて、リンク機構の位置および駆動力を制御するリンク機構駆動指令部140を含む。
(もっと読む)
ハンド装置及び多関節ロボット
【課題】ライナーのピッチを設備の段替え作業や段替え交換後の調整等を必要とすることなく簡単に変更できるようにする。
【解決手段】ハンド本体2に、筒状のライナー5を挿入保持可能なチャックユニット31を、所定のピッチで複数並設したハンド装置1において、ハンド本体2に、チャックユニット31を並設方向へそれぞれ直線移動可能に設けるスライド機構10と、チャックユニット31を所定の位置に位置決めする位置決め機構15とを設け、この位置決め機構15を、並設方向に配置されて、並設方向での中心を境にして互いに逆向きとなるネジ部16,16を有し、このネジ部16に螺合させた一対のナット部18にチャックユニット31をそれぞれ連結したボールネジ17で形成して、ボールネジ17の回転により、ナット部18と共にチャックユニット31を同時に相反方向へ直線移動させて、ピッチを変更可能とした。
(もっと読む)
ハンド装置及び多関節ロボット
【課題】ライナー径を変更しても、設備の段替え作業や段替え交換後の調整等を必要とすることなく簡単に変更できるハンド装置及び多関節ロボットを提供する。
【解決手段】
ハンド本体2に、筒状のライナー5を挿入保持可能なチャックユニット31を、所定のピッチで複数並設したハンド装置であって、チャックユニット31に、ライナー5の挿入保持位置に対してライナー5の半径方向へ移動可能で、ライナー中心側への移動によってライナー5の端部を外側からクランプする複数のスライドプレート34を設けて、このスライドプレート34におけるライナー5の端部との当接部位を、ライナー5の端部外周面に当接するクランプ35と、ライナー5の軸方向の端面に当接する円形凸部35aとからなる段部形状としたことにある。
(もっと読む)
力制御装置
【課題】力制限を超過した際にロボットを停止処理する場合においても、作用力が許容値以下となる制約を満たす範囲で、動作時間の短縮化、立上げ調整時間の短縮化を図る。
【解決手段】対象物に対するロボットの目標位置指令を生成する指令生成手段(10)と、目標位置指令に応じて追従制御を行うロボット制御手段(20)と、対象物からロボットへ働く作用力が所定の力制限値を超過した場合に停止指令を生成する力制限超過判別手段(30)と、ロボットを減速停止させる場合を考慮して、対象物の特性および所定の力制限値に基づいて、減速停止中において作用力が所定の許容値以下になる制約を満たす範囲で動作速度を最大にする最適速度を算出する速度最適化手段(40)とを備え、指令生成手段(10)は、最適速度に応じた目標位置指令を生成し、停止指令を受信した場合には、ロボットを減速停止させる指令を生成する。
(もっと読む)
ロボットシステム
【課題】嵌合・挿入作業において、様々な原因に依存する作業良否を正確に判定する。
【解決手段】特徴量抽出部113と特徴量履歴記録部114と作業良否・原因入力部115と作業良否・原因履歴記録部116と特徴量存在範囲算出部117と特徴量存在領域記録部123と作業良否判定部118と作業良否・原因表示部119とを備え、特徴量存在範囲算出部117は特徴量履歴記録部114と作業良否・原因履歴記録部116の2つの履歴データから、作業成功時の特徴量の存在範囲と作業失敗時の特徴量存在範囲を失敗原因ごとに算出して、各特徴量の存在領域を特徴量存在領域記録部123に記録し、当該特徴量存在領域に基づいて、作業良否判定部118は特徴量抽出部113から得られる作業実行時の特徴量がどの特徴量存在領域内にあるかによって作業良否と失敗時の原因を判定し、作業良否・原因表示部119はその判定結果を表示する。
(もっと読む)
ロボットの教示再生装置および教示再生方法
【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
力制御ロボット
【課題】力制御ロボットのエンドエフェクタの振動を抑制し、エンドエフェクタに作用する力の検出精度を向上させる。
【解決手段】一方が固定端、他方が可動端となるロボットアーム1の可動端に弾性部材3aを介して接続されたエンドエフェクタ2は、エンドエフェクタコントローラ6によって開閉動作等を制御される。力覚センサ3は、エンドエフェクタ2に作用する外力を、弾性部材3aの変形量より検出する。エンドエフェクタコントローラ6は、弾性部材3aよりロボットアーム1の固定端側に支持され、ロボットコントローラ5は、力覚センサ3の検出値に基づいてロボットアーム1の動作を修正する。
(もっと読む)
ロボットを用いた嵌合装置
【課題】嵌合方向への押付により十分なモーメントが検出できない状況下でも、ワークを傷付けずに嵌合作業が行える嵌合装置及び嵌合方法を提供する。
【解決手段】嵌合ワークW2を把持したロボット11により、該嵌合ワークを定位置に設置された被嵌合ワークW1に嵌合する嵌合装置10は、被嵌合ワークに対する嵌合ワークの嵌合が進行しているか否かを判断する嵌合進行判断部と、嵌合が進行していないと判断された場合に、嵌合ワークの現在の姿勢を変化させ、変化させている間に力測定部(14)により得られた嵌合方向の力、又は嵌合ワークの嵌合方向の速度に基づいて、嵌合ワークの適正姿勢を探索するワーク姿勢探索部と、探索された嵌合ワークの適正姿勢を用いて、嵌合ワークを把持したロボットに嵌合動作を継続させる嵌合動作指示部と、を備える。
(もっと読む)
コネクタ自動挿抜装置
【課題】 多数のRFコネクタを有した供試体において、予め手作業でRFコネクタに終端器を装着することなく、複数のRFコネクタに対して終端器を自動挿抜してRFコネクタのRF特性計測を行うコネクタ自動挿抜機構を得る。
【解決手段】 終端器及びRFコネクタの端末位置を計測する画像処理装置と、終端器を保持器から取り出して把持する把持部と、把持部を3次元方向に移動させる駆動部を有したロボットハンドと、計測用ケーブルを3次元方向に移動可能な計測用ハンドと、ロボットハンドにおける把持部の把持または解放動作、およびロボットハンド及び計測用ハンドの移動動作を制御する制御装置とを備える。
(もっと読む)
ロボットシステム、その制御装置及び方法
【課題】サイクルタイムを増加させることなく、ハンドで把持した作業対象物の位置姿勢計測及び位置姿勢修正を行えるようにする。
【解決手段】アーム先端部11の位置姿勢を制御可能なアーム1と、アーム先端部11に取り付けられ、作業対象物3を把持する把持機構21を具備し、把持した作業対象物3のアーム先端部11からの相対位置姿勢を制御可能なハンド2と、把持した作業対象物3のアーム先端部11からの相対位置姿勢計測を行う位置姿勢計測装置22とを備えたロボットシステムにおいて、把持機構21で作業対象物3を把持した後、アーム先端部11が移動している最中に、作業対象物2のアーム先端部11からの相対位置姿勢の計測を行い、その位置姿勢計測の結果に基づいて、作業対象物3がアーム先端部11からの所定の相対位置姿勢をとるように、ハンド2のアーム先端部11からの相対位置姿勢の修正を行う。
(もっと読む)
1 - 20 / 72
[ Back to top ]