
Fターム[3C007AS23]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 自動車製造用 (107)
Fターム[3C007AS23]に分類される特許
1 - 20 / 107
ケーブル支持装置
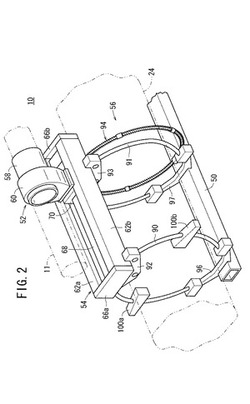
【課題】ケーブルのたるみを大きくすることなく且つ保持部のストロークを長大化することなく、ロボット手首の自由度に十分に追従させることができるケーブル支持装置を提供する。
【解決手段】ケーブル11を保持する保持部52と、第2アーム24の長手方向に沿って移動自在な直動スライダ70を有する直動機構54と、第2アーム24の周方向に沿って回転自在な回動スライダ92、93を有する回動機構56とを備える。直動機構54及び回動機構56により、保持部52が第2アーム24の長手方向及び周方向に変位自在となっている。
(もっと読む)
車体のドア開け方法及び装置

【課題】ロボットの設置箇所を小さくすると共に、サイクルタイムの短縮を図ることが可能な、ドア開け方法及び装置を提供すること。
【解決手段】双腕ロボットにおいては、2つのアームがS1軸及びS2軸の各々によって回動される。その結果、S1軸を用いた回動により、ドア開き動作(ステップST2)が実現される。そして、S1軸とS2軸とを用いた回動により、ボルト緩め動作を行うための、ドア91のインナ側に入り込む移動(ステップST3)が実現される。この場合の移動は、ドア91の方向を向くような移動である。その結果、ドア把持位置まで移動したとき(ステップS26)、双腕ロボットは、ボルト緩め動作を行い易い姿勢となっている。
(もっと読む)
ドア把持装置及び方法
【課題】小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能な、ドア把持装置及び方法を提供すること。
【解決手段】双腕ロボット11は、ドア91等の重力方向の力を受ける荷重受けとしてのドアH受け部材(その構成要素であるウレタンパッド42)と、ドアを把持する第1把持治具23R1と、を備えている。第1把持治具23R1は、2点PA,PBの相対距離が可変な、ドア91の開口部120等に当接する2つのドア把持パッド53,54を有している。一方のドア把持パッド53は、ドアの荷重方向の力を受ける方向に開口部の点PAに当接し、他方のドア把持パッド54は、荷重受け(ウレタンパッド42)とドア把持パッド53とにより発生するモーメントを受ける方向に開口部の点PBに当接する。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】サスペンションアッセンブリを車両ボディに接近させていく過程でダンパーが車両ボディ側と干渉する場合でも、外部センシング機器を用いずに、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サス整列・搭載ロボット4の上昇と同期させて、下廻り締付・ダンパー挿入ロボット5によりダンパーの位置を必要に応じて変更することで、ボディに対するダンパーの干渉を回避する。所定の高さに到達したとき、ダンパー取付孔13L,13Rの位置に関連して動作するエンジンルーム内締付ロボット6のエンドエフェクタ61の位置を測定し、測定した位置からダンパー取付孔の位置を算出し、算出した位置を下廻り締付・ダンパー挿入ロボットに伝送し、伝送された位置に応じてダンパーをダンパー取付孔に位置合わせする。
(もっと読む)
投影面情報提示装置と方法
【課題】ロボットハンドと対象物との相対位置誤差を拡大表示することができ、これにより目視かつ手動操作によりロボットハンドを対象物に対して正確に位置決めすることができる投影面情報提示装置と方法を提供する。
【解決手段】 ロボットハンド12に設けられたプロジェクタ22により、原パターンAを対象物2に固定された投射面3上に投射し(S1)、ロボットハンド12に設けられたカメラ24により、投射された原パターンである投射パターンBを撮影し(S2)、撮影した投射パターンである撮影パターンCを、ロボットハンド12が対象物2に対し予め設定した位置と姿勢をとる基準位置において、原パターンAと一致するように変形し(S3)、変形した変形パターンDを原パターンAに重畳する(S5)。(S1)〜(S5)を順に繰り返す。
(もっと読む)
ワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法
【課題】高精度なワークの位置決めを必要とせず、大まかに位置決めされたワークの位置・姿勢を精度良く検出することが可能なワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法を提供すること。
【解決手段】第1のビジョンカメラ7が作業姿勢のキャブ2の第1基準孔17を二次元検出位置から撮像し、撮像された画像を解析して第1基準孔17の位置を求めることによって、基準位置に対する作業姿勢のキャブ2の概略変位が暫定的に演算される。概略変位が演算されたとき、塗装ガン4c及びシーリングガン5c,6cが制御されて、第1の補正位置及び第2の補正位置に塗装ガン4c及びシーリングガン5c,6cが設定され、第1のビジョンカメラ7の第1の画角よりも狭い第2〜第4の画角に設定された第2〜第4のビジョンカメラ8,9,10が、作業姿勢のキャブ2の第1〜第3基準孔17,18,19を撮像する。
(もっと読む)
作業補助装置
【課題】従来に比して、製造ラインでのレイアウト性及び生産効率を向上できる作業補助装置を提供すること。
【解決手段】ワークWを保持するアタッチメント5を有し、作業者Sが付加する操作力に基づいてワークWを搬送するアーム3と、アーム3を駆動させるエアシリンダ21と、エアシリンダ21に出力するエアの圧力を調整する電空レギュレータと、電空レギュレータと通信可能に設けられて、電空レギュレータの出力エア圧を制御する制御装置7と、を備えることを特徴とする作業補助装置1である。
(もっと読む)
ワーク把持装置およびワーク把持方法
【課題】互いに隣接しつつこの隣接する方向に対して交差する方向にずれた位置にある複数のワークであっても容易に把持できるようにする。
【解決手段】ワーク把持装置1は、4つのワーク把持ユニット5,7,9,11により4つの部品13,15,17,19をそれぞれ個別に把持する。部品13,15の上に部品17,19が載せられる。部品13,15を把持するワーク把持ユニット5,7は、上下シリンダ27,27Aを備えており、下端のアーム37,37Aが把持フレーム3に対して上下動可能である。4つのワーク把持ユニット5,7,9,11で4つの部品13,15,17,19を把持した状態で、ワーク把持装置1全体を上昇させると、上下シリンダ27,27Aが伸長して部品13,15が部品17,19に対して下方に離間した位置関係となる。
(もっと読む)
加工システム及び加工方法
【課題】加工装置による加工動作の最中やその直前においても、加工装置の位置決め制御の精度を向上させ、ひいては加工装置による加工精度も向上させること。
【解決手段】加工機12が取り付けられたロボット11は、ワーク2の加工対象の目標位置41までの移動動作と、加工対象に対する加工動作とを行う。ロボット移動機構14は、ロボット11を、搬送台車18により搬送されているワーク2と並走するように移動させる。ロボット制御装置17は、同期センサ15の検出結果を用いてロボット移動機構14の移動を制御し、視覚センサ13又は同期センサ15の検出結果を用いてロボット11の位置決め制御を実行する。
(もっと読む)
作業補助システム及び作業補助方法並びに該作業補助方法を記録した記録媒体
【課題】工場内の生産ラインにおいて、ロボットと一人の作業者が協調して作業を行うシステムを提供する。
【解決手段】作業者の手に装着され、当該手による作業動作を経時的に測定してその測定結果である動作情報を3次元座標データとして送信するモーションキャプチャ2と、作業者の手に装着され、部品に加わる荷重を経時的に測定してその測定結果である圧力検出データを送信する圧力センサ23と、前記3次元座標データ、及び前記圧力検出データに基づき産業用ロボット4を制御する制御部31とを備える。制御部は、モーションキャプチャから得られた3次元座標データにロボットを追従させ、作業者の手が標準作業位置に到達したと判定すると、作業者が手で部品を押圧することで圧力センサから送信される圧力検出データの値に応じた圧力値で、ロボットの保持部で部品を押圧させる保持部押圧機能31bとを有する。
(もっと読む)
加工システム及び加工方法
【課題】ワークの加工ラインの製造コストを減少させ、かつ、ワークを効率的に加工すること。
【解決手段】加工システム1において、連続搬送機構20は、ワーク2を連続搬送させる。加工機12は、ワーク2に対して所定の加工動作を行う。ロボット11は、加工機12が先端に取り付けられているアーム23と、アーム23が取り付けられるロボットベース22と、を有する。ロボット移動機構14は、ロボットベース22が取り付けられ、ロボット11を移動させる。ロボット制御装置16は、アーム23の移動制御と共に、ロボット移動機構14に対する移動制御を実行する。即ち、ロボット制御装置16は、ロボット移動機構14の移動制御として、連続搬送機構20によるワーク2の連続搬送とは独立して移動させる制御を実行する。
(もっと読む)
教示ライン補正装置、教示ライン補正方法、及びそのプログラム
【課題】基準部位の相関関係が異なっていた場合も、その誤差の影響を緩和し、ティーチングデータを精度良く補正するための教示ライン補正装置、教示ライン補正方法、及びそのプログラムを提供する。
【解決手段】予め設定された基準部位の第1基準位置aと第2基準部位の第2基準位置bとを通る線を含む平面であり、且つ、第3基準部位の第3基準位置cで決定される第1平面を規定し、検出した第1基準部位の位置a´と、検出した第2基準部位の位置b´とを通る線を含む平面であり、且つ、検出した第3基準部位の位置c´で決定される第2平面を規定し、第1基準部位を原点とし、原点の前記第1基準部位の前記第1基準位置が、検出した原点の前記第1基準部位の位置と同じ位置になり、且つ、該第1平面が該第2平面と同一平面上となる補正量を算出し、該算出した補正量に基づいて、動作ポイントが教示された基準座標を補正する教示ライン補正部とを備える。
(もっと読む)
塗装システム
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物が検知されていない場合、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS1)。装置は、対象物が検知された場合、目標位置よりも対象物に近い位置を新たな目標位置として、新たな目標位置までの新たな経路を設定して、移動制御を切り替えるための切替条件が満たされるまでの間、新たな経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3及びS4)。装置は、切替条件が満たされた場合、視覚サーボ制御を実行する(ステップS5)。
(もっと読む)
ハンドガイドシステムの視覚情報支援装置
【課題】作業対象物の狭所へワークを挿入して組付ける場合や、ハンドガイドシステムの操作部と作業対象物の組付け位置が離れている場合でも、人の死角となる狭所での作業を可能にすることができるハンドガイドシステムの視覚情報支援装置を提供する。
【解決手段】手動操作盤によりロボットハンドを操作して作業対象物にワークを組付けるハンドガイドシステムの視覚情報支援装置であって、ロボットハンドのワーク近傍に設けられ作業対象物2の死角領域の画像を取得するカメラ32と、ロボットハンドのワーク近傍に設けられ作業対象物の前記画像領域にスリット状、円弧状、スポット状又はこれらの組合せのレーザ光を照射するレーザ装置34と、手動操作盤近傍に設けられ前記画像を表示するモニタ36とを備える。
(もっと読む)
ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付を完了できるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ハンド14は、作業対象物2にワーク3を組付ける際に、オンハンド操作盤18が作業対象物からロボットの反対側に突出する長さを有している。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行中に、対象物が検知された場合、視覚サーボ制御を実行する。装置は、この視覚サーボ制御を実行する上で、マニュピュレータの所定の状態に基づいて、視覚サーボ制御係数に含まれる係数の少なくとも一部を変更する(例えば実施形態におけるビジュアルインピーダンス制御の移動処理のステップS32,S33,S36,S37)。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】マニュピュレータを対象物まで短時間で移動させること。
【解決手段】対象物であるボルト穴を視認可能なカメラが取り付けられたマニュピュレータを、複数の対象物まで移動させる制御を行う装置が、複数の対象物の各々の位置に対応させて予め設定された目標位置TPi’に向けて、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3)。装置は、マニュピュレータが目標位置TPi’に移動した場合、目標位置TPi’に対応する実穴位置Hiについての実誤差量diを検出する(ステップS5)。装置は、実誤差量d1乃至diの履歴のうち、少なくとも1回分の履歴を用いて、次のi+1回目の目標位置TPi+1’を更新する(ステップS10,S12,S13)。
(もっと読む)
外部操作ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付作業を完了することができる外部操作ハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボットエリアと組立ラインの間に、ハンド14が移動可能な作業エリアとハンドが侵入できない安全エリアとが隣接して設けられ、オンハンド操作盤18は、作業対象物にワークを組付ける際に、作業エリア内に位置するように設定されている。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有している。
(もっと読む)
ハンドガイド装置とその制御方法
【課題】単純作業はロボットに任せ、人の判断や経験を必要とする作業時のみ、人がロボットを操作して、組立ライン上を移動する作業対象物にワークを組付けることができるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア4a内で移動可能なロボット16と、ハンドのワーク把持装置近傍に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
1 - 20 / 107
[ Back to top ]