
Fターム[3C007AS34]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | サービス用 (240)
Fターム[3C007AS34]に分類される特許
1 - 20 / 240
コンテンツ提供システム、コンテンツ提供方法、及びコンテンツ提供プログラム
【課題】ユーザのコンテンツに対する反応を容易に取得でき、ユーザ嗜好に合ったコンテンツを提供する。
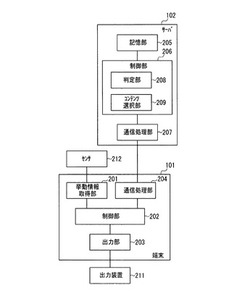
【解決手段】コンテンツ提供システムは、コンテンツを出力する出力部203と、ユーザの挙動を検出するセンサ212から得られる情報に基づいて、ユーザの挙動の種類を判定する判定部208と、出力部203で出力されたコンテンツに対応する判定部208による判定結果に基づいて、出力部203がさらに出力するコンテンツを決定するコンテンツ選択部209とを備える。
(もっと読む)
移動ロボット、移動ロボット用の学習システムおよび移動ロボットの行動学習方法

【構成】 移動ロボット10は、周囲反応情報データベース88を備え、イベント会場や街中などの人と共存する様々な環境に配置され、案内および荷物運搬などの様々なサービスを提供する。そして、サービスを提供する際には、複数種類の移動の仕方によるサービスの提供を試み、自身の行動に対する周囲の人の反応状況から適切な行動を学習して、その後のサービスの提供に生かす。
【効果】 周囲の人の反応状況から適切な行動を学習するので、人と共存する環境において効果的にサービスを提供できる。
(もっと読む)
マスタ・スレーブ型ロボット操作システム
【課題】安価で操作性に優れたマスタ・スレーブ型ロボット操作システムを提供する。
【解決手段】マスタ・スレーブ型ロボット操作システムは、操作者によって操作されるマスタ操作装置10と、遠隔操作されるスレーブロボット装置と、マスタ操作装置とスレーブロボット装置との間で両装置の状態情報を双方向通信する情報通信手段30とを備える。スレーブロボット装置は、任意の姿勢又は動作を実現するために複数のアクチュエータを備えている。マスタ操作装置10は、スレーブロボット装置が備える構造に対応する構造を備えることでスレーブロボット装置が取り得る任意の姿勢又は動作と同様の姿勢又は動作を実現可能であり、且つ、スレーブロボット装置に設置された複数のアクチュエータに対応した複数のアクチュエータ13a〜13hを備えている。
(もっと読む)
外力判定用パラメータ決定装置及びプログラム、並びに移動体装置
【課題】ロボットに与えられている外力判定を高精度に行うための閾値を決定する。
【解決手段】近似部142が、ロボットに対して人的操作による外力及び積載による外力をそれぞれ与えたときにロボットに加わる垂直抗力を所定のサンプリング周期(Δt)で取得し、各サンプリング間隔における垂直抗力の変動量を指数関数で近似する。また、取得部144が、f0の値を変更しつつ、各外力における垂直抗力の変動量がf0を超える確率GL、GHをそれぞれ求め、それらの確率の差分を取得する。そして、パラメータ導出部146が、取得部が取得した確率の差分に基づいて選択されるf0の値を、外力の判定に用いるパラメータ(閾値fc)とする。
(もっと読む)
ロボットによるサービス提供システム、ロボット管理装置及びロボット管理方法
【課題】人間のように柔軟性の高い知識構造を実現可能とする。
【解決手段】ロボット3によるサービス提供システム1は、それぞれ異なる性質の情報元から得られる情報に基づいて各レイヤーが生成され、かつ、各レイヤーにおいて、所定の観点から要素間の関係性が構築されている複数のレイヤーであって、当該複数のレイヤーを備える知識NW11と、ユーザからの要求タスクに含まれる情報に基づいて、知識NW11が備えるレイヤーから前記情報に関連する要素を抽出し、その抽出した要素と前記情報との関係性を記述することで、要求タスクに応じたタスクベースオントロジーを生成するオントロジー生成部12と、生成したタスクベースオントロジーを用いて、ロボット3の動作を制御するロボット動作制御部13と、を備える。
(もっと読む)
移動ロボット
【解決手段】移動ロボット10は、移動速度データベース88を含み、人と共存する様々な環境内を自律的に移動する。移動速度データベース88には、人の移動速度の傾向を表す代表値に応じて定められる最大移動速度が、環境内の各エリアのそれぞれと対応付けて記憶される。移動ロボット10は、移動する際には、現在地に対応する最大移動速度を移動速度データベース88から読み出して設定し、設定した最大移動速度を上限とした移動速度となるように移動する。
【効果】周囲の人と調和した移動が可能となるので、周囲の人の邪魔になることなくスムーズに移動できる。
(もっと読む)
ロボットシステム
【課題】自走式のロボットを適用して、被検者である人間に対して所定の処置を確実にかつ低コストで行うことができるロボットシステムを提供する。
【解決手段】移動可能なロボット100と、シート状に形成され、上面における被検者200の位置および姿勢を検出するシートセンサ10と、シートセンサ10に設けられ、シートセンサ10により検出された被検者200の位置および姿勢に関する情報、ならびに、シートセンサ10の位置および向きに関する情報を送信する第一,第二送信部23,32と、ロボット100に設けられ、第一,第二送信部23,32により送信される情報を受信する受信部111と、ロボット100に設けられ、受信部111により受信した情報に基づいて、ロボット100が被検者200に対する所定の処置を行うようにロボット100を制御するロボット制御部112を備える。
(もっと読む)
ロボット制御方法及びプログラム
【課題】サービスロボットの利用効率を向上すること。
【解決手段】ロボット制御方法において、ロボットの状態遷移の履歴を保持し、制御装置で発生されたロボットに対する割込要求を受け付け、ロボットが割込要求を割込可能の状態にない場合はロボットの状態遷移の履歴に基づいて割込要求に対して推定される割込処理の待ち時間を算出し、前記制御装置に対して待ち時間を提示するように構成する。前記状態遷移の履歴を保持する工程は、前記ロボットの状態遷移の履歴を状態遷移列の形で保持し、前記ロボットが任意の状態から異なる状態に遷移する状態遷移列の出現回数を求める工程を更に含み、前記待ち時間を算出する工程は、前記状態遷移列とその出現回数に基づいて前記待ち時間を算出する。
(もっと読む)
自律移動サービス提供システム
【課題】券売機等で利用者によるサービス要求の呼出行為に応じて自律移動ロボットが利用者との間の本人照合を通して迅速に対応し、作業効率を高め、かつサービスの品質を高めることができる自律移動サービス提供システムを提供する。
【解決手段】この自律移動サービス提供システムは、所定の位置に居る利用者300の要望に応じて利用者との間で音声会話または表示情報を介して通信を行う手段23,24,26、利用者に係る音声データまたは画像データを取得する手段31,32,33、音声データまたは画像データと利用者の位置データを送信する手段28を備える専用端末200と、位置データに基づいて利用者の居場所までの移動経路を自動生成する手段52、利用者との間で音声会話または表示情報を介した通信に基づき本人照合を行う手段55、利用者の要求する案内サービスを提供する手段52を備える自律移動ロボット400とから構成されている。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物の移動時及び静止時にかかわらず脚の特徴を抽出して人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と略垂直な平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定してレンジデータを出力する走査部と、レンジデータを所定周期でサンプリングしてセグメントを形成し、セグメントに基づいて脚の特徴を抽出する抽出部と、抽出した特徴の運動特性及び幾何情報に基づいて人物を検出する検出部を備え、抽出部は、最短距離近傍法を用いて取得した2つのセグメントペアの移動特性に基づいて、各セグメントペアが静止している静止セグメントを分類する静止特徴強分類器と、各セグメントペアが移動している移動セグメントを分類する移動特徴強分類器を含み、分類されたセグメントの特徴に基づいて2つのセグメントペアから脚ペアを抽出するように構成する。
(もっと読む)
ロボットの動作制御装置及びプログラム
【課題】ロボットに外力が作用したときに、状況に拘らずロボットの衝撃吸収性能を良好に保持できるとともに、ロボットの動作遅れによる振動の発生を抑制する。
【解決手段】本発明の動作制御装置12では、変位量xを時間tで分数階微分(微分階数r)し、定数Pを乗じた値が、ロボット10に作用した外力に等しくなる関係を維持するように、ロボットアーム11の動作を制御する処理がなされる。
(もっと読む)
ロボットの軌道計画システム及び軌道計画方法
【課題】ロードマップを用いて軌道計画を行う場合に、複雑な環境下でも指定されるタスクに応じた軌道計画を実現可能とし、かつ、軌道算出可能性を保証しつつ軌道計画に要する処理コストを低減可能とする。
【解決手段】ロボットの軌道計画システム20は、タスク種類と、初期姿勢と、最終姿勢と、に応じて構成された複数のノードがそれぞれ登録された複数のロードマップを記憶するロードマップ記憶部21と、入力されるタスク種類と、入力される初期姿勢及び最終姿勢と、から、対応するロードマップIDを特定するロードマップ選択器22と、周辺の環境情報を取得する環境情報取得器23と、ロードマップIDから対応するロードマップを特定して、入力される初期姿勢及び最終姿勢と、環境情報と、から、軌道を計画する軌道計画器24と、を備える。
(もっと読む)
ロボット制御方法、プログラム、及びロボット
【課題】ロボットの自律動作における不自然さを軽減させる。
【解決手段】可動部を有するロボットが、センサから出力される音声データまたは画像データに基づいて、ロボットに対する対話要求を検出し、検出された対話要求を示す検出データに検出の信頼度を含めて出力し、信頼度が所定レベルより高い場合は、検出データに基づいて可動部を動作させ、信頼度が所定レベルより高くない場合は、予め登録された動作データに基づいて可動部を動作させる。
(もっと読む)
サービス提供システム及びサービス提供方法
【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
給仕サービスのためのロボットシステム
【課題】複数台の移動型ロボットを合理的に運用して省エネルギのもとに質の高い給仕サービスを提供すること。
【解決手段】各移動型ロボット100の状態情報に基づいて移動型ロボット100が調理物引渡場所14に到着できる時刻を予測演算し、予測演算された各移動型ロボット100の到着時刻のうち最も到達時刻が早い一台の移動型ロボット100を選択して当該移動型ロボット100に調理物配達を実行させる処理を行う。
(もっと読む)
ロボットアームのためのハンドカメラ装置
【課題】 ハンドに突出部を形成することなく、しかも、ロボットアームの制御系を複雑にすることなく、把持した把持対象物を正確に目標位置に移動、位置決め可能とする。
【解決手段】 ロボットアームのハンドに、把持対象物の位置及び方向を観測するカメラを設置し、その撮像情報に基づいて把持対象物を認識し、ハンドで把持させた後、目標位置を探索及び認識して、把持対象物を目標位置に移動させるロボットアーム及びハンドの制御装置において、ハンドの把持部に前方カメラを設けるとともに、側方にも側方カメラを設置し、ハンドが把持対象物を把持する直前あるいは直後において、前方カメラの撮像情報に基づく制御から、側方カメラの撮像情報に基づく制御に切り換える切換手段を具備させ、把持した把持対象物に視界を妨げられることなく、把持対象物を正確に目標位置に移動、位置決めすることができる。
(もっと読む)
静電容量型センサおよびセンサ取付構造
【課題】柔軟で、荷重の測定レンジが広い静電容量型センサを提供することを課題とする。
【解決手段】静電容量型センサ5は、エラストマー製であって、積層方向のばね定数が異なる複数の誘電層500、501が積層されてなる誘電体50と、誘電体50の表側に配置され、エラストマーと、エラストマーに充填される導電性フィラーと、を有する表側電極01X〜12Xと、誘電体50の裏側に配置され、エラストマーと、エラストマーに充填される導電性フィラーと、を有する裏側電極01Y〜12Yと、を備える。
(もっと読む)
基板搬送システムおよび基板処理システム
【課題】ロボット設置領域を小さくして小型化を図ることが可能な基板搬送システムを提供する。
【解決手段】この基板搬送システム10は、アーム部(第1アーム部123および第2アーム部124)およびハンド部125を水平面内で回動させることによって、処理装置20側に設けられた開口部202を介して基板収納装置11内から処理装置20内に基板110を搬送するとともに、ハンド部125により基板110を支持した状態の最小旋回領域の外縁が開口部202を介して処理装置20内に突出するように構成された基板搬送ロボットを備えている。
(もっと読む)
案内ロボット、案内方法、及び案内制御用プログラム
【課題】対象を指し示す動作を適切なアームで行うと共に、データ容量の削減を図る。
【解決手段】案内情報の出力に合わせて対象を指し示す動作を含む第1のジェスチャを行うための関節機構の少なくとも回転方向及び回転量を規定するデータであって、第1のアーム部14の軸構成に適合するように構成された第1のジェスチャデータ21を記憶し、位置関係と第1のジェスチャにおけるアーム部の移動方向とに基づいて第1のジェスチャを第1のアーム部14又は第2のアーム部15のどちらで実行するかを決定し、第2のアーム部15が第1のジェスチャを行う場合に第1のジェスチャデータ21を鏡像反転させる。
(もっと読む)
力覚提示装置
【課題】視覚障害者等の使用者に、提示方向への力覚を明確に付与すること。
【解決手段】力覚提示装置10は、回転軸12と、回転軸12を回転させるモータ13と、回転軸12の外周側一部分に配置されて偏心回転可能に設けられた重量ユニット14とを備えている。モータ13は、提示側領域に重量ユニット14が存在するときに第1の回転速度で回転軸12を回転させ、そうでないときに第1の回転速度よりも遅い第2の回転速度で回転軸12を回転させる。重量ユニット14は、回転半径が可変になるように設けられた錘16と、回転軸12に固定配置された固定磁石17と、錘16と一体移動可能に配置された可動磁石18とを備えている。各磁石17,18は、それらの間の磁力と錘16の遠心力の大きさとのバランスに応じて相対移動可能に設けられ、回転軸12が第2の回転速度のときには、第1の回転速度のときよりも錘16の回転半径が小さくなる。
(もっと読む)
1 - 20 / 240
[ Back to top ]