
Fターム[3C007BS17]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | ヘビ型 (68)
Fターム[3C007BS17]の下位に属するFターム
関節が連動するもの (8)
各関節が独立して動くもの (25)
多自由度で屈曲するもの (18)
Fターム[3C007BS17]に分類される特許
1 - 17 / 17
軌道計画方法、軌道計画システム及びロボット
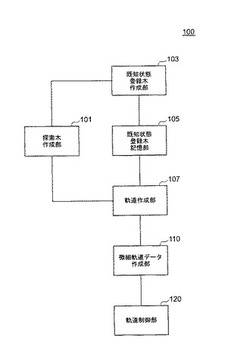
【課題】計算コストを抑えながら状態空間の探索に制約が生じることのない軌道計画方法及び軌道計画システムを提供する。
【解決手段】物体の状態を状態空間において探索木の根として定め、所定の時間間隔における力学的な関係から時間経過した後の該物体の次の状態を状態空間において探索木の枝として定める探索木作成部101を備える。さらに既知状態登録木を記憶する既知状態登録木記憶部105と、予め区分された状態空間の複数のセルから次の状態が属するセルを定め、該セルに属する状態が既知状態登録木の枝としてすでに登録されているかどうか判断し、登録されている場合に次の状態を破棄し、そうでない場合に次の状態を該既知状態登録木の枝として登録する既知状態登録木作成部103と、を備える。既知状態登録木の枝として登録された状態の中から目標状態までの距離がもっとも小さい状態を選択し、その状態から軌道を求める軌道作成部107を備える。
(もっと読む)
遠隔操作型アクチュエータ

【課題】 細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で確実かつ精度良く変更することができ、しかもパイプ部としてのスピンドルガイド部が湾曲した状態でも姿勢変更させられて、全体構成がコンパクトな遠隔操作型アクチュエータを提供する。
【解決手段】 スピンドルガイド部3の先端に先端部材を姿勢変更自在に取付け、先端部材に工具を回転自在に設ける。スピンドルガイド部3の内部に、工具回転用駆動源41の回転をスピンドルに伝達する回転軸22と、姿勢変更用駆動源42で進退動作させられて先端部材を姿勢変更させる姿勢操作部材31とを設ける。姿勢変更用駆動源42の回転を減速する減速機構43と、減速された出力を回転運動から進退運動に変換する動作変換機構44Aと、この動作変換機構44Aの出力により姿勢操作部材31を進退動作させる出力部材51とを設ける。
(もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】基部アーム及び回動アームの端部同士を連結し、端部を支点として前記回動アームを回動させるマニピュレータ用関節部である。マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アームの端部に形成されたユニット装着孔に嵌合する円筒状のハウジングと、該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する複列の転がり軸受と、を有する軸受ユニットと、を備える。ハウジングには、軸方向一方側の外周面に外径側に突出する鍔部が形成され、軸方向他方側の外周面に雄ネジ部が形成され、雄ネジ部にナットを螺合させることにより、回動アームが鍔部とナットに挟まれて軸受ユニットに固定される。
(もっと読む)
フレキシブルセンサチューブ
【課題】瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
マニピュレータ及びこれを用いたマニピュレーション装置
【課題】簡易でかつ新規な構造を持つ、屈曲動作が可能なマニピュレータを提供する。
【解決手段】第1駆動シャフト101は、それ自身の中心軸を中心として回動する。第2フレーム104は、第1フレーム102に対して回動する。第1フェースギヤ部材103は、第1駆動シャフト101により、正逆方向に回転駆動される。第3フレーム108は、第2フレーム104に対して回動する。第1ギヤ部材105は、第2フレーム104に固定されている。第1ギヤ部材105及び第2ギヤ部材106は、いずれも、第1フェースギヤ部材103によって回転駆動される。第2フレーム104は、第1ギヤ部材105の回動に伴って回動する。第3ギヤ部材107は、第2ギヤ部材106によって回転駆動される。第3ギヤ部材107は、第3フレーム108に固定されている。第3フレーム108は、第3ギヤ部材107の回動に伴って回動する。
(もっと読む)
ハンドリングシステム
【課題】本発明は、段取り換えを容易にでき、1つのロボットの動作に複数の機能を備えたハンドリングシステムを提供する。
【解決手段】双腕ロボットを用いた組立作業をするハンドリングシステムにおいて、前記双腕ロボットが、線状体送給部に対面するように配置されたものである。
(もっと読む)
原点位置調整機構、及びロボット
【課題】原点位置調整冶具の基部に対する位置決め精度が従来のものより低くても、回動部の原点位置を所望の位置に調整可能な原点位置調整機構を提供する。
【解決手段】原点位置調整機構30は、調整アーム体14dが基準アーム体14cに対して回動する多関節マニピュレータ10において、調整アーム体14dの原点位置を調整するためのものである。原点位置調整機構30は、位置調整冶具32と、位置決めピン31とを備える。位置調整冶具32は、基準アーム体14cの取付け部26に取り付けられ、前記原点位置を規定するための基準面39を有する。位置決めピン31は、調整アーム体14dに挿入され、前記基準面39に沿わせることで調整アーム体14dの前記原点位置が決まるように構成されている。そして、前記原点位置調整冶具32は、取付け部26に沿って相対変位しても、位置決め部材31と基準面39とによって決まる調整アーム体14dの原点位置が変わらないように構成されている
(もっと読む)
連続軌道を有する蛇行ロボットクローラ
蛇行ロボットクローラ(10)は、直列に連結される少なくとも2つの本体セグメントを有する多関節体(12)と、多関節体(12)の外周に沿って動作可能に支持される連続軌道(18)とを含む。蛇行ロボットクローラ(10)は、さまざまな移動態様および移動姿勢が可能である。  (もっと読む)
(もっと読む)
マニピュレータの形状制御システム及び形状制御装置
【課題】多関節構造のマニピュレータを簡単な操作で所望の形状にすること。
【解決手段】 複数の形成部材M1〜M5を相互に屈曲自在に連結してなる多関節型のマニピュレータ11と、各形成部材M1〜M5を独立して屈曲させる動力となるアクチュエータ12と、アクチュエータ12の駆動を制御してマニピュレータ11を所定の形状にする形状制御装置14と、形状制御装置14に対してマニピュレータ11の形状を指令する操作装置13とを備えて形状制御システム10が構成されている。形状制御装置14は、仮想円Sを使ってマニピュレータ11の目標形状を決定する演算部41を備え、この演算部14は、マニピュレータ11が、その基端側の基準点Oから先端側に向って、仮想円Sの円周上の接点Pまで直線状に延びた後で円周に沿って屈曲する目標形状とする。操作装置13は、仮想円Sの位置及び大きさを任意に指定可能に設けられる。
(もっと読む)
ロボットの教示支援装置
【課題】 最適な移動点毎の各関節の角度位置の組合せを短時間で演算可能な教示支援装置を提供する。
【解決手段】 解候補の組合せごとに移動点間の移動時間を全て求め、下流側の解候補に対して、移動時間が最も短い上流側の解候補の組合せを抽出する。その抽出結果に基づいて、始点から終点まで手先を移動させる全体的な移動時間が最も短くなる解候補の組合せを探索する。このようにして、全ての組合せを対象としたうえで、最適な解候補の組合せを求めることで、局所解に陥る可能性のある勾配法に比べて、最適な解候補の組合せを確実に得ることができる。また評価の低い組合せを除いて、最適な解候補の組合せを探索することで、評価の低い組合せを除かずに行う全域探索法に比べて、短時間に最適な解候補の組合せを得ることができる。
(もっと読む)
ロボットアーム
ロボットアームは、複数のセグメント(10)を含み、各セグメントは、関節リンク(11)と、各セグメントを湾曲させる手段(24)とを含み、それによって、該アームは、蛇行経路を追従できるようになる。らせんばね(37)が、該アームと同軸状に設けられ、該リンクを初期基準位置に向かわせ、各セグメントのリンクにわたって曲げを分布する。  (もっと読む)
(もっと読む)
位置決めロボット
【課題】 破損を防いでワークを協働して目標位置に位置合わせすることができる位置決めロボットを提供する。
【解決手段】 各多関節アーム30A〜30Cに設けられる各関節部Jt1〜Jt6のうちで、少なくとも1つが非駆動関節部となる。非駆動関節部が連結するアーム体は、駆動関節部に設けられるサーボモータ41によるアーム体の変位に追従して、受動的に相対変位する。ハンド部27の把持位置のずれ、アーム体の機械的誤差およびサーボ遅れなどの誤差によって駆動関節部に設けられるアーム体がずれたとしても、このずれに追従して非駆動関節部に連結されるアーム体が変位することによって、ワークなどに生じる変形力を逃すことができ、ワーク40および位置決めロボットの破損を防ぐことができる。
(もっと読む)
屈曲駆動機構
【課題】横断面積を小さくする構造とすることを可能とする屈曲駆動機構を提供する。
【解決手段】外皮チューブの先端に設けられ、外皮チューブ内を通る複数のワイヤの伸縮に応じて屈曲動作する作動部と、外皮チューブ内に配置され、複数のワイヤのそれぞれを伸縮駆動する互いに独立した複数のアクチュエータとを備え、複数のアクチュエータが外皮チューブ軸線方向に配置されている屈曲駆動機構。さらに、外皮チューブ内を通る複数のワイヤのそれぞれの長さが、ワイヤと外皮チューブとの摩擦によってワイヤの伸縮動作が妨げられない長さとなるように、複数のアクチュエータのそれぞれを作動部に近接して配置した。
(もっと読む)
三次元多目的素子システムおよび三次元多目的素子を生成するための方法
【課題】移動および他の素子との連結、他の素子からの分離をコンピューターによって制御することのできる単一の一体型素子を備えた三次元多目的素子システムを提供する。
【解決手段】システムの単一素子は壁部(6)から作成されるケーシングから構成され、単一素子のケーシング壁部の相互位置を変化させるエレクトロプラスチック作動装置(3)により互いにリンクされる。壁部の相互位置は、プログラム可能な集積回路(1)から伝送される励起信号により変化が起こる。熱エミッタ(14)はシステム装置から余剰熱を運び去る。単一素子内には、各単一素子を連結するためのインターロック(7)と磁気コイル(8)とが設けられ、さらに集積回路(1)と、インターロックと、磁気コイルと、エレクトロプラスチック作動装置とに電圧を供給する電圧源(5)が設けられている。 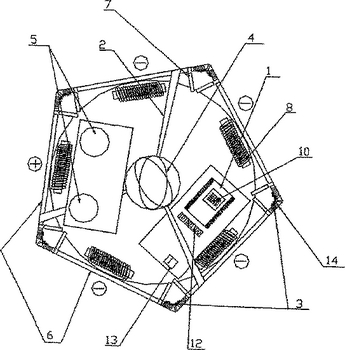 (もっと読む)
(もっと読む)
ミミズ型ロボット
【課題】 ミミズ型ロボットを動作させるために必要なアクチュエータとすべり止め(ゴム等の弾性体)を浮かせる機構を提供すること。
【解決手段】 本体を伸縮させるアクチュエータに袋の伸縮を利用した。またすべり止めの周りにビニール等の合成樹脂材料からなる袋をつけた。
(もっと読む)
関節ロボット
【課題】超音波モータの予圧力を小型かつ単純な機構により適宜調節することが可能な関節ロボットの提供。
【解決手段】圧電体11,12,13,14と、さらに外周端部を張り出した固定子フランジ4と、をともに積層し、圧電体11,12,13,14とこの固定子フランジ4とを一体に縦貫して両端面中央に開口する中空孔1aが形成された固定子1と、この固定子1の振動端面上に載置されて、この固定子1の中空孔1aの延長上に貫通する貫通孔2aが形成された回転子2と、中空孔1aと貫通孔2aとを一連に挿通し、その両端を固定子1と回転子2とのそれぞれに協調して張力を伝達可能に相対峙する2つの固定部材に固定されて張架されたワイヤ3と、を具備させる特徴的構成手段の採用。
(もっと読む)
超柔軟身体を有するロボットシステム
【課題】使いやすい感覚系(センサ系)を備えた,無限次元の運動学的自由度を有する柔軟な身体をもつロボットシステムとその制御方法を提供する.
【解決手段】無限次元の運動学的自由度を有する身体と,上記身体に力を印加することのできるアクチュエータと,上記身体の特徴量を検出する内界センサと,上記センサからの情報から適切な制御入力を計算しアクチュエータに指令するコントローラと,から構成されるロボットシステムを構築する.
感覚系(センサ系)をうまく選択することで,超駆動系,超劣観測系でありながら,所望の作業を内界センサの情報のみで達成できる.
(もっと読む)
1 - 17 / 17
[ Back to top ]