
Fターム[3C007BS21]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕並列配列 (242)
Fターム[3C007BS21]の下位に属するFターム
Fターム[3C007BS21]に分類される特許
1 - 10 / 10
吸着装置及びロボットシステム
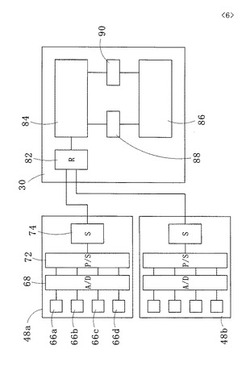
【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
移送ロボット

【課題】本発明は、2組のリンク機構から構成された、昇降機構において、リンクへの負荷を軽減する機構を提供する。
【解決手段】搬送物を載置するハンド部と、前記ハンド部と連結され少なくとも2つ以上の回転関節を備え前記ハンド部を一方向に移動するように伸縮し旋回軸方向に対向するように配置された2組の水平アームからなる水平アーム機構30と、前記水平アーム機構30の支持ベース8に連結され水平アーム機構30を昇降する少なくとも2組のリンク機構から構成される昇降機構20と、から構成され、前記支持ベース8と前記昇降機構20の第3関節部8bとの間には水平アーム機構30をX方向に移動自在に支持する直動機構が配置されたものである。
(もっと読む)
吸着装置及びワーク搬送装置
【課題】吸着パッドを所定の真空度にする時間を短縮することができる吸着装置及びワーク搬送装置を提供する。
【解決手段】本発明のワーク搬送装置1は、搬送対象物であるワークwの表面に配置される吸着パッド21を真空ポンプ22により真空引きしてワークwを把持する吸着装置2と、吸着パッド21を支持するクロスバー31とクロスバー31を移動させる駆動アーム32と駆動アーム32を移動可能に支持する支持部材33とを有する構造部材3と、を備えており、前記吸着装置2は、支持部材33に形成された真空タンク4と、真空タンク4と吸着パッド21との間に配置された第一吸気流路5と、第一吸気流路5に配置された電磁弁6と、真空タンク4と真空ポンプ22との間に配置された第二吸気流路7と、を有する。
(もっと読む)
移送ロボットの制御方法
【課題】本発明は、比較的小さな設置面積に配置でき、上下への昇降範囲が広くできるとともに、安全にワークを移送することが可能な移送ロボットを提供する。
【解決手段】搬送物を載置するハンド部14と、前記ハンド部14を一方向に移動させる水平アーム機構30と、前記水平アーム機構30を上下に移動する昇降機構20を備えた移送ロボットにおいて、前記昇降機構20が、ベース部材2に備えられた少なくとも2組のリンク機構から構成され、2組のリンク機構の第2関節部6が互いに内側になるように動作させながら、ハンド部14のローリング方向、横ずれ動作、ヨーイング方向の動作を行なう。
(もっと読む)
外科用マニプレータ
【課題】
【解決手段】本発明は、外科用すなわち医療用ツールが6自由度までの動きをするよう操作することのできる外科用マニプレータを提供する。該マニプレータは、接触型インターフェースと、それに関係した位置検知システムとを有している。マニプレータ及び接触型インターフェースの互いに相対的な向きに基づく、動きの情報が、接触型インターフェースから与えられる。この動きの情報を調節するため使用することのできるコントローラが提供される。
(もっと読む)
パラレルリンク式搬送装置の制御装置及び制御方法
【課題】搬送物を移動させている最中においてもリンク先端の位置精度を向上させることができるパラレルリンク式搬送装置の制御装置及び制御方法を提供する。
【解決手段】複数のモータドライバ25,26に与える各トルク指令値に、パラレルリンク機構の先端の位置目標値[X,Y]と搬送物の質量mに基づいて求めた複数の補正トルク指令値Kfp、Kfqをそれぞれ加算する。慣性力の影響を反映した補正トルク指令値Kfp、Kfqを、モータドライバ25,26へ与えるトルク指令値に加算することによって、パラレルリンク機構を構成する各リンクの運動に対する補償制御を行うことができるので、搬送物を移動させている最中においてもリンク先端の位置精度を向上させることができる。
(もっと読む)
五節リンク型ハプティックデバイス
【課題】XY軸とZ軸の操作が干渉しない五節リンク型ハプティックデバイスを提供する。
【解決手段】五節リンク機構2を有する五節リンク型ハプティックデバイスにおいて、五節リンク機構2の所定位置に設けられ五節リンク機構2を操作する操作部3と、Z軸方向を指示する回転型指示機構4とを備え、操作部3の姿勢を五節リンク機構2の姿勢によらず一定にするための平行リンク機構5とを備えた構成とすることで、XY軸とZ軸の操作が干渉しないようにする。。
(もっと読む)
平行リンク機構、ワーク搬送装置
【課題】 一対の長尺アームの一方に発生する横振動を効果的に抑制することができる平行リンク機構、及びそれを用いたワーク搬送装置を提供する。
【解決手段】 基端部材9と、基端部材9に対して回転可能に支持される長尺アーム7bと、長尺アーム7bの先端に回転可能に支持されと共に基端部材9に対して平行に配置される出力部材19と、出力部材19及び基端部材9にそれぞれ回転可能に支持されると共に長尺アーム7bから所定間隔をおいて平行に延設される第二長尺アーム7aと、を有する平行リンク機構25において、長尺アーム7b及び第二長尺アーム7aにそれぞれ回転可能に支持されると共に第二長尺アーム7aの横振動を抑制する制振部材25を備える。
(もっと読む)
嚥下ロボット装置
【課題】 嚥下のメカニズムを解明すべく嚥下動作をロボットによって再現する。
【解決手段】 嚥下ロボット装置は、口腔期においては、板バネ12の舌尖側の取り付け孔12を凹状に変形し、その位置の形状を元に戻すと共に隣り合う舌根側の取り付け孔12位置を凹状に変形することを、舌尖側の位置から前記舌根側の位置まで順次行う。その結果、舌部材10の舌背10Aが舌尖方向から順に隆起して、舌部材10と上顎部材160との間にある食塊が、咽頭壁シート120の方向へ運搬される。
(もっと読む)
基板搬送装置
【課題】 本発明は搬送構造を改善した基板搬送装置を提供する。
【解決手段】 本発明による基板搬送装置は、ベース部20と;ベース部20上に直線運動ができるように設置されて、回転体32が備わっている運動部30と;運動部30の両側に並立設置されて、高さ調節が可能な一対のフレーム部40a、40bと;一対のフレーム部40a、40bの間に連結されて、フレーム部40の高さ調節動作に連動して、上下直線運動する搬送部50と;を含んで構成される。これにより、構造的な安全性を確保した状態で、簡便で精密に基板、特に大型基板を搬送させることが可能になる。
(もっと読む)
1 - 10 / 10
[ Back to top ]