
Fターム[3C007BS24]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕並列配列 (242) | パラレルリンク型 (135)
Fターム[3C007BS24]に分類される特許
1 - 20 / 135
パラレルリンクロボット
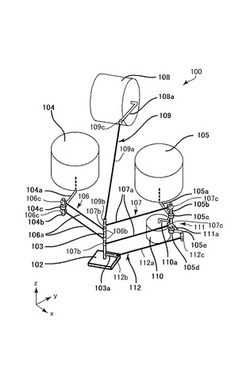
【課題】クリーンな環境でワークに対して作業等を行える構造を実現する。
【解決手段】第1、第2モータ104、105により出力部材102を水平方向に移動させる。第3モータ108により出力部材102を鉛直方向に移動させる。第4モータ110により出力部材102を鉛直軸回りに回動させる。出力部材102と第1、第2、第3、第4モータ104、105、108、110との間にそれぞれリンク機構106、107、109、112を設ける。そして、出力部材102を鉛直方向に対して傾斜させることなく、鉛直方向及び水平方向に移動可能、且つ、出力部材102を鉛直軸回りの回転可能とする。更に、第1、第2、第3、第4モータ104、105、108、110を、出力部材102の移動領域に対して水平方向に外れた位置に配置する。
(もっと読む)
パラレルリンクロボット

【課題】出力部材102のx、y、z方向の移動、及び、出力部材102の回動を、簡単な制御で行える構造を実現する。
【解決手段】出力部材102と第1、第2モータ104、105との間にそれぞれ第1、第2リンク機構106、107を設ける。そして、出力部材102の回転軸とz軸との平行を保持しつつ、第1、第2モータ104、105の駆動により出力部材102をxy平面に沿って移動させる。出力部材102と第3モータ108との間に第3リンク機構109を設け、出力部材102のxy平面の移動に追従しつつ、第3モータ108の駆動により出力部材102をz軸方向に移動させる。出力部材102と第4モータ110との間に第4リンク機構112を設け、出力部材102の位置に拘らず第4モータ110の駆動により出力部材102を回転させる。
(もっと読む)
立体視ロボットピッキング装置
【課題】カメラとワークの間隔が長くなるのを抑制し、ステレオ方式でワークの3次元位置を算出しロボットの吸引部の配置位置を決める立体視ロボットピッキング装置を提供する。
【解決手段】コンテナ11内のワーク12を順次ロボット13によって別位置に移動する立体視ロボットピッキング装置10において、ワーク取出し位置18までコンテナ11を送る移動手段14と、ワーク取出し位置18にあるコンテナ11全体を撮像するカメラ15と、ワーク取出し位置18にあるコンテナ11を部分的に撮像するカメラ16と、カメラ15、16が撮像した各画像中のワーク12をパターンマッチングによって検出して、各画像中でのワーク12の2次元位置を算出する画像処理手段23とを有し、カメラ15、16は、コンテナ11の移動方向に沿って配置され、画像処理手段23は、カメラ15、16の各画像中のワーク12の2次元位置からワーク12の3次元位置を算出する。
(もっと読む)
基板移載装置
【課題】ベルヌーイチャックで吸引保持した基板を、規制体で所定姿勢に位置保持する基板移載装置において、規制体の規制機能の回復をより少ない手間で簡便に行うことができるようにする。
【解決手段】基板Wの表面に平行な方向の滑り移動を規制するガイド53をガイド取付部材51に対して着脱自在に構成する。これにより、規制体50の全体の交換を要することなく、ガイド53のみを交換するだけで、規制体50の規制機能を回復することができる。従って、規制体50の全体を交換する形態に比べて、規制体50の規制機能の回復に要する費用や手間を抑えることができる。
(もっと読む)
棒状部材の搬送装置
【課題】複雑な機構を利用せずに、ランダムに配置された棒状部材を逐次的に効率よく取出し、取出した棒状部材を所定の場所に搬送することができる搬送装置の提供。
【解決手段】吸引装置18は、ロボットハンド22に取付けられたノズル24を有し、取出し対象の棒状部材14aの第1の円柱状部分30の端部にノズル24を接近させ、第1の円柱状部分30をノズル24内に吸引しながら、ノズル24を上昇させて棒状部材14aを保持するように構成されている。
(もっと読む)
パイプ成形体
【課題】剛性を確保しつつ連結部材との接合を強化可能なパイプ成形体を提供する。
【解決手段】
パイプ成形体であるロワーアーム7は、炭素繊維強化プラスチックにより円管状に形成された外側層71を備えているので、金属製のものに比べて高い剛性が確保される。さらに、ロワーアーム7においては、外側層71の一端71aを含む一端部に、雄ねじ74aが設けられている。このため、ロワーアーム7と連結部材9との接合に際して、接着剤での接着に加え、雄ねじ74aと雌ねじ9aとの螺合を用いることが可能となる。したがって、ロワーアーム7によれば、連結部材9との接合を強化することが可能となる。
(もっと読む)
パイプ成形体
【課題】ロボットアームの剛性の確保及び振動減衰特性の向上を図ることを可能とするパイプ成形体を提供する。
【解決手段】
パイプ成形体であるロワーアーム7は、CFRPにより円管状に形成された外側層71と内側層72とを備えているので、剛性が確保される。さらに、ロワーアーム7は、外側層71と内側層72との間に配置された制振層73を備えているので、振動減衰特性が向上される。よって、ロワーアーム7を用いたロボットアーム3においては、剛性が確保されると共に振動減衰特性が向上される。
(もっと読む)
剛性を有する複数の弾性ワイヤーを用いたパラレルメカニズム
【課題】従来のパラレルメカニズム等の多自由度機構は、一般的に構造が複雑で、柔軟性も低い。
【解決手段】本発明のパラレルメカニズムは、剛性を有する複数の弾性ワイヤーを合理的に用いて構成することにより、従来のパラレルメカニズムでは不可能であった柔軟な動きを行えるようにした多自由度機構を提供するものであり、即ち、剛性を有し、円形断面で単線の弾性ワイヤー1の複数本が、被駆動側部材2と駆動側部材3の各支点位置において同一配置となるように接続されており、また被駆動側部材と駆動側部材間には弾性ワイヤーを、横断面方向から見た配置を維持しつつ、軸方向に移動及び軸方向の回りに回転可能に支持する中間支持部材4が設けられているパラレルメカニズムである。
(もっと読む)
パラレルリンク機構および駆動ステージ
【課題】パラレルリンク機構のテーブルの位置精度を向上する。
【解決手段】パラレルリンク機構1は、ベース2と、ベース2に対して6自由度を有し、ベース2と対向して配置されるテーブル3と、一端がベース2に取り付けられ、他端がテーブル3に取り付けられる伸縮可能なロッド4を有する複数の連結部10と、テーブル3の位置の算出に用いる複数のセンサ部14とを備えている。センサ部14は、一端がベース2に取り付けられ、他端がテーブル3に取り付けられるワイヤ12と、ワイヤ12の長さを計測するセンサ13とを有している。
(もっと読む)
操作機構
【課題】 可動部の可動範囲が広く、可動部をスムーズな動きで精度良く操作することができる操作機構を提供する。
【解決手段】 操作機構1は、3組以上のリンク機構11Aを介して、固定部材4に対し入力部材15Aを姿勢変更可能に連結した入力側リンク作動装置2Aと、3組以上のリンク機構11Bを介して、固定部材4に対し出力部材15Bを姿勢変更可能に連結した出力側リンク作動装置2Bとを備える。リンク機構11A,11Bは、固定側の端部リンク部材1aと、入力側または出力側の端部リンク部材1cと、これら両端部リンク部材1a,1cを連結した中央リンク部材1bとでなる。入力側リンク機構11Aの固定側の端部リンク部材11aの回転を出力側リンク機構11Bの固定側リンク部材11aに伝達する回転伝達機構5を2組以上設ける。
(もっと読む)
多自由度位置決め装置および多自由度位置決め方法
【課題】簡易な構成で、エンドプレートおよびツールや治具の重量を支えることができ、また、駆動電流による発熱を抑制し、作業を行う際の駆動力を確保する。
【解決手段】ベースプレート2とエンドプレート4との間に接続された複数のリンク3と、各リンク3に取り付けられ、リンク3を駆動させるアクチュエータ6と、ベースプレート2とエンドプレート4との間に接続され、定常位置でのエンドプレート4およびエンドプレート4に取り付けられた物体の重量を支える重力補償装置5とを備えた。
(もっと読む)
5軸を有する力覚提示マニピュレータ
【課題】エンドエフェクタがマニピュレータのベースに対して、3自由度の並進運動および2自由度の回転動作を出力可能であり、小型で、広い範囲の回転動作が可能な力覚提示マニピュレータを提供する。
【解決手段】力覚提示マニピュレータは、マニピュレータのベース10と、エンドエフェクタ60と、エンドエフェクタ60を支持する3本のアーム20a、20b、20cと、エンドエフェクタ60と3本のアーム20a、20b、20cを連結する3本の連結リンク23a、23b、23cと、3本のアーム20a、20b、20cを駆動する駆動手段と、を備える冗長パラレルメカニズムを用いた構成となっている。
(もっと読む)
位置および姿勢の補正機構
【課題】高速に動作可能である、位置および姿勢の補正機構を提供する。
【解決手段】減速機を介さない複数のリニアモータ101A〜Fの組み合わせによって構成されるリンク機構と、複数のリニアモータ101A〜Fのそれぞれの位置を測定するリニアエンコーダ120A〜Fと、複数のリニアモータ101A〜Fのそれぞれに流れる電流値を測定する電流センサ110A〜Fと、リニアエンコーダ120A〜Fにより測定された上記位置および電流センサ110A〜Fにより測定された電流値が入力される制御部130とを備えている。制御部130は、算出された上記力と入力された複数のリニアエンコーダ120A〜Fのそれぞれの位置に基づいて、リンク機構の位置および駆動力を制御するリンク機構駆動指令部140を含む。
(もっと読む)
多自由度移動体
【課題】可動部を高速移動できるようにする。
【解決手段】ベース部10と可動部5との間の距離が変化しても、伸縮リンク機構により構成された伝達機構7が伸縮して距離の変化に対応しつつ、電動機2dの回転運動を回転部8に伝達することができる。伸縮リンク機構として構成した伝達機構7は軽量なカーボン製とすることができるため、伝達機構7を軽量化でき、その結果、可動部5を高速動作させることが可能な多自由度移動体1を実現できる。
(もっと読む)
パラレルメカニズム及びパラレルメカニズムを用いた位置決め装置
【課題】部品等を高精度に、高い自由度で移動可能であり、また小型、軽量なパラレルメカニズム及びパラレルメカニズムを用いた位置決め装置を提供すること。
【解決手段】位置決め装置1は、パラレルメカニズム2と、パラレルメカニズム2を駆動するリニアアクチュエータ61,62,63,64と、リニアアクチュエータ61,62,63,64が載置されるベース3と、リニアアクチュエータ61,62,63,64を制御する制御部5とから構成されている。パラレルメカニズム2は、アーム10,20,30,40と、可動先端部60とから構成され、アーム10,20,30,40には、側面視円弧型のばね関節14〜16,24〜26,34〜36,44〜46が設けられている。従って、パラレルメカニズム2内の複数のばね関節の形状により変形方向を制御し、これら複数のばね関節の復元力を拮抗させることで動作精度と剛性を高めることができる。
(もっと読む)
電動アクチュエーター
【課題】電動アクチュエーターの握力トルクを高めることを目的とする。
【解決手段】電動アクチュエーターであって、回転運動をする電動駆動部200と、前記電動駆動部に接続される直進運動機構であって、前記電動駆動部と接続される第1のネジ部230と、前記第1のネジ部と嵌合する第2のネジ部240を有し、前記第1のネジ部に加えられる回転運動を前記第2のネジ部の直線運動に変換する直進運動機構と、屈曲可能な屈曲機構(101〜104、111〜113)と、前記屈曲機構と前記第2のネジ部とを連結し、前記第2のネジ部の直線運動に基づいて前記屈曲機構を屈曲させる連結部材130と、を備える。
(もっと読む)
パラレルメカニズムロボット
【課題】 軸回転機構を繰り返し回転したとしても軸回転機構における回転方向の位相ずれを僅かなものに維持する。
【解決手段】 軸端部36と軸受カップ37との連結部において、角柱形の軸端部36の少なくとも2つの外側面43a,43bを軸受カップ37の2つの内側面44a,44bに押し付けた状態で軸端部36を軸受カップ37に連結固定する。
(もっと読む)
リンク作動装置
【課題】 可動部が自由度機構として構成され、可動部の可動範囲が広く、可動部が軽量で、可動部の位置決め精度が高いリンク作動装置を提供する。
【解決手段】 入力部材104に対し出力部材105を、3組以上のリンク機構101を介して姿勢を変更可能に連結する。リンク機構101は、入力側および出力側の端部リンク部材101a,101cと中央リンク部材101bとでなる。リンク機構101は、各リンク部材101a,101b,101cを直線で表現した幾何学モデルが、中央リンク部材101bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。リンク機構用駆動源121により2組以上のリンク機構101を動作させて、出力部材105の姿勢を制御する。各リンク機構101の配置の内側に通して、可撓性を有し入力部材104および出力部材105の並び方向に回転力を伝達する可撓性ワイヤ4Aを設ける。
(もっと読む)
パラレルリンクロボット
【課題】一般に、ロボットの駆動源であるモータの取り付け方法として、モータフランジ面をプレートに固定し、このプレートを、ロボット本体に結合する構造を採用することが多い。パラレルリンクロボットにおいても、この構成が一般的である。しかしながら、従来の技術では、高速動作時の振動等の影響で、モータの主軸がぶれ、取り付け面とモータの相対位置がずれることにより、ロボットの位置決め精度が低下するという課題がある。
【解決手段】本発明のパラレルリンクロボットのモータ取付け方法は、対向するモータを取り付ける部材を有し、これを一体のブロック構造とするものである。これにより、従来の課題を解決し、少なくとも対向する2つのモータ主軸の中心軸を一致させ、高速動作時におけるロボットの位置決め精度低下を軽減する方法および装置である。
(もっと読む)
パラレルリンクロボットの動作方法
【課題】パラレルリンクロボットの駆動モータには、常に過大な負荷が繰返しかかることが多い。更に高速な動作や、過大な負荷をかける必要があるときには、一般には、より大型で高出力なモータを採用するか、減速機等をもちいて、トルクを増大する方法を採択することになる。しかしながら前記従来の技術では、パラレルリンクロボット自体の構成が、高出力化、大型化するために、コストアップを伴うという課題がある。
【解決手段】本発明のパラレルリンクロボット21は、移動開始点と移動終了点座標情報から、適切な移動姿勢を演算する機能を有し、移動開始前もしくは、移動中に、駆動負荷が軽減する姿勢をとり、移動を行うことを可能とする。
(もっと読む)
1 - 20 / 135
[ Back to top ]