
Fターム[3C007BS22]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕並列配列 (242) | 平行リンク (97)
Fターム[3C007BS22]の下位に属するFターム
フロッグレッグ型 (60)
Fターム[3C007BS22]に分類される特許
1 - 20 / 37
搬送ロボット
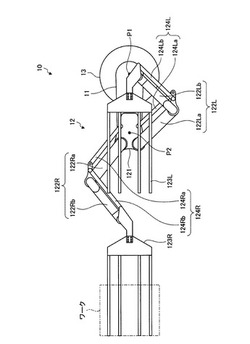
【課題】直動搬送機構を用いることなく省スペース化を図ること。
【解決手段】搬送ロボット10は、スイングアーム部11と、アームユニット12とを備える。スイングアーム部11は、基端部に設けられたスイング軸P1を中心として水平方向に揺動する。アームユニット12は、スイングアーム部11の先端部に設けられた鉛直な旋回軸P2を中心として回転する本体部121と、本体部121に連結され水平方向に伸縮する右伸縮アーム部122Rおよび左伸縮アーム部122Lと、右伸縮アーム部122Rおよび左伸縮アーム部122Lの先端にそれぞれ設けられたワーク保持部123R,123Lとを備える。
(もっと読む)
搬送アーム装置

【課題】可動範囲が広く、位置決め精度やメンテナンス性に優れた搬送アーム装置を提供する。
【解決手段】基台2上に基部111を枢設された第1アーム11と、その先端部112に基部121を枢設された第2アーム12と、その先端部122に基部131を枢設されたハンド部13と、第1アーム回動手段6と、第2アーム回動手段7とを有し、基台2に対する第1アーム11および第2アーム12の角度をそれぞれ変化させることでハンド部13の基部131を所定の位置に移動させる搬送アーム装置1であって、第2アーム回動手段7が、基台2上に枢設され第1アーム11と同一の回動中心114を有する回動部材14と、回動部材14と第2アーム12とを連結する連結手段20とを備えており、基台2に対して回動部材14および第2アーム12が同一方向に同一角度連動して回動するように構成した。
(もっと読む)
ロボット
【課題】ロボットの稼働中におけるアーム機構の脱落を抑制し、必要に際してアーム機構を簡便に着脱可能とし、ロボットを容易に運用可能にする。
【解決手段】ロボット1のアーム機構7が、アーム20に連結された一対のリンク21,22の間に架け渡された付勢ユニット24を備え、各リンク21,22が被係止部81,82を有し、付勢ユニット24が、付勢部材66を収容するハウジング60と、各リンク21,22の被係止部81,82にそれぞれ係止される一対の係止部61,62を有し、係止部61,62は被係止部81,82が挿通される取付孔73,78と、取付孔72,77を取り囲む周縁部74,79の一部が切除されて形成された切除部75,80とを有し、取付孔73,78が切除部75,80を介して係止部61,62の外方に開放されている。
(もっと読む)
ロボット
【課題】簡素な構成にすることができ、しかも省エネ型に構成することができるロボットを提供する。
【解決手段】少なくとも複数本の可動脚2を備えたロボットであって、可動脚2は、胴体部に回転自在に備えた股関節部5と、股関節部5から一対の大腿部平行リンク7A,7Bを介して連結される膝関節部6と、膝関節部6から一対の下腿部平行リンク9A,9Bを介して連結される足関節部8と、大腿部平行リンク7A,7Bのうちの一方の大腿部リンク7Aの膝関節側端部に固定されたギヤ12と、ギヤ12と噛合うようにギヤ12を備える大腿部リンク7Aと同一側の下腿部リンク9Aの膝関節側端部に固定された連動ギヤ13と、股関節部5を回動させるためのアクチュエータ16とを備えさせた。
(もっと読む)
産業用ロボット
【課題】本発明は、簡単に手首部フランジ面の傾きが調整できる産業用ロボットを提供することを目的とする。
【解決手段】固定ベース2に一端を固定された旋回ヘッド3と、前記旋回ヘッド3に連結された下部アーム4と、前記下部アーム4に連結された上部アーム5と、前記上部アーム5の先端に手首部6を備え、4自由度を有し、前記旋回ヘッド2に連結された第1の補助リンク7の他方端と一端が連結された第2の補助リンク8の他方端と前記手首部6の間に長さ方向に分割連結された第3の補助リンク9を備えたものである。
(もっと読む)
医学用ツールを患者の体内で操作する装置
【課題】 最小侵襲外科手術に適したマニプレータを提供する。
【解決手段】 医学用ツールを患者の体内で操作する装置は、患者の体内に挿入可能な管321と、該管321により支持され且つ第一及び第二の軸線を有するジンバル継手330と、第一及び第二の軸線の周りで枢動し得るようにジンバル継手330により支持されたツール322と、管321を通ってジンバル継手330まで伸びる第一及び第二の細長いコネクタ350と、第一及び第二のコネクタ350を通じてジンバル継手330に力を加え、ツール322を第一及び第二の軸線の少なくとも一方の周りで枢動させ得るように第一及び第二のコネクタ350にそれぞれ作用可能に接続された第一及び第二のアクチュエータ355とを備えている。第一及び第二のコネクタ350は圧縮状態及び張力状態にて作用可能である。
(もっと読む)
多軸ロボット及びその速度制御装置
【課題】多軸ロボットの表面部位の移動速度を適正に規制しつつもその移動速度をなるべく高くする。
【解決手段】基台2に連設された複数の連結部材3〜8の先端にツール部材9を取り付けてなり、基台2及び複数の連結部材3〜8が互いに相対回転可能な多軸ロボット1であって、ツール部材9の移動時に各回転軸A1〜A6の角速度を制御する速度制御装置を備え、速度制御装置が、複数の連結部材3〜8及びツール部材9において予め設定された複数の表面部位の最高移動速度が所定の制限移動速度となるように当該回転軸の角速度を求める制御を実行する構成となっている。
(もっと読む)
多関節ロボットおよびそれを用いたロボットシステム
【課題】本発明は、空間的に自由に移動することができる旋回ユニット搭載ロボットを用い、軽量化され密集配置に適した多関節ロボットおよびそれを用いたロボットシステム提供する。
【解決手段】水平面内を旋回するリンク機構5の先端に3次元空間を自在に移動可能なロボット1を備えた多関節ロボットであって、前記ロボット1が双腕ロボット1から構成されるものである。
(もっと読む)
パラレル型リンクロボットにおける関節角の誤差検知装置
【課題】パラレル型リンクロボットにおいて、その関節角を検出する検出部の検出誤差を的確に検知する。
【解決手段】n角形リンク機構(nは4以上の整数)を有するパラレル型リンクロボットにおいて、関節角の検出部における検出誤差を検知する誤差検知装置であって、n角形リンク機構を構成する関節部のうち、n−1個の関節部における関節角をそれぞれ検出する関節角検出部と、n角形リンク機構の構造的条件の下、該n角形リンク機構の各リンク部材の長さと、関節角検出部によって検出されたn−1個の関節部の関節角とに基づき、関節角における角度誤差に関するパラメータを取得する角度誤差パラメータ取得部と、角度誤差パラメータ取得部によって取得されたパラメータに基づいて、n−1個の関節部のうち何れの関節部において角度誤差が生じているかについての判断を行う誤差判定部と、を備える。
(もっと読む)
力覚提示マニピュレータ
【課題】エンドエフェクタが並進3自由度運動を行う力覚提示マニピュレータを提供する。
【解決手段】本発明の力覚提示マニピュレータは、マニピュレータのベースと、エンドエフェクタと、駆動手段と、駆動手段の動力をエンドエフェクタの並進3自由度動作に変換する一対のリンク機構と、を備える冗長パラレルリンク機構を用いる。また、エンドエフェクタは、一対のリンク機構それぞれからの拘束により、空間位置に依らず姿勢を維持する。
(もっと読む)
フォース感応触覚インターフェース
【課題】第1ユーザローカル環境に存在するユーザとフォースを物理的に交換する装置を提供すること。
【解決手段】第1ユーザローカル環境に存在するユーザとフォースを物理的に交換する装置である。この装置は、a)ユーザの身体部に接続するための接続要素202と、b)接続要素を基準118と物理的にリンクさせるリンケージ手段とを含んでおり、リンケージ手段は、i)基準118に対して接続要素202の少なくとも3つの独立自由度にパワー供給するパワー手段120、130、140と、ii)基準118に対して接続要素202の少なくとも2つの独立自由度をパワーが供給されない状態に維持する手段とを含んでいる。
(もっと読む)
伸縮アーム
【課題】 プーリとベルトとを用いることなく、安定した動作を行うことが可能な伸縮アームを提供する。
【解決手段】 第1腕要素(20)が、第1回転中心(10)を中心として回転可能であり、第2回転中心(11)を画定する。第2腕要素(60)が、第2回転中心を中心として回転可能であり、第3回転中心(12)を画定する。第1平行リンク機構(21)で画定される相互に平行な一対の辺の一方が第1回転中心を中心として回転可能であり、他方が第2回転中心を中心として回転可能である。第2平行リンク機構(61)が画定する相互に平行な一対の辺の一方が第2回転中心を中心として回転可能であり、他方が第3回転中心を中心として回転可能である。関節機構(40)が、第1平行リンク機構の、第1回転中心を通過するリンクの姿勢を固定した状態で、第1腕要素が第1角度だけ回転したとき、第2腕要素を第1腕要素に対して、第1腕要素とは反対向きに、第1角度の2倍の角度だけ回転させる。
(もっと読む)
マニピュレータおよびこれを用いたマニピュレータ装置
【課題】小型でしかもマニピュレータ先端での移動量が大きい処置が可能なマニピュレータとすること。
【解決手段】マニピュレータは、マニピュレータ軸部110と、マニピュレータ軸部110に対して直動自在に支持されると共に駆動源の駆動力により駆動される第1ロッド109と、第1ロッド109に対して回転可能に支持された第1歯車112と、マニピュレータ軸部110に対して支持される第1ラック113と、マニピュレータ軸部110に対して第1ロッド109と同一方向に直動自在に支持された第2ラック115と、第2ラック115の駆動力により駆動される処置具400とを備える。第1ラック113と第2ラック115とは、互いの歯面が向き合うよう配置されている。第1歯車112は、第1ラック113と第2ラック115との間に挟持されて噛み合った状態に配置されている。
(もっと読む)
マニピュレータ装置
【課題】マニピュレータ装置において、オートクレーブ滅菌を可能としつつ、高帯域の力覚をフィードバックでき、安定性と応答性を向上すること。
【解決手段】マニピュレータ装置は、スレーブマニピュレータ1、マスタマニピュレータ2、制御装置3を備える。スレーブマニピュレータ1及びマスタマニピュレータ2は、ジンバル部に平行リンクを介して結合した並進軸をそれぞれに備える。制御装置3はスレーブエンコーダとマスタエンコーダの検出信号に基づいて生成した広帯域の力覚を術具17からマスタマニピュレータ2の手元操作部27にフィードバック制御する。
(もっと読む)
伸縮アーム
【課題】 プーリとベルトとを用いることなく、安定した動作を行うことが可能な伸縮アームを提供する。
【解決手段】 第1腕要素(20)が、第1回転中心(10)を中心として回転可能であり、第2回転中心(11)を画定する。第2腕要素(60)が、第2回転中心を中心として回転可能であり、第3回転中心(12)を画定する。第1平行リンク機構(21)で画定される相互に平行な一対の辺の一方が第1回転中心を中心として回転可能であり、他方が第2回転中心を中心として回転可能である。第2平行リンク機構(61)が画定する相互に平行な一対の辺の一方が第2回転中心を中心として回転可能であり、他方が第3回転中心を中心として回転可能である。間接機構(40)が、第1平行リンク機構の、第1回転中心を通過するリンクの姿勢を固定した状態で、第1腕要素が第1角度だけ回転したとき、第2腕要素を第1腕要素に対して、第1腕要素とは反対向きに、第1角度の2倍の角度だけ回転させる。
(もっと読む)
物品の直線搬送装置、及び当該装置におけるベルト体の張力調整方法
【課題】
第1及び第2の各平行リンク機構の連結部に設けられたベルト伝動機構を構成する一対のベルト体の張力調整を容易にすることである。
【解決手段】
第1及び第2の各平行リンク機構LD1 ,LD2 が中間リンク台Eで連結されて、当該中間リンク台Eを構成する上下一対の中間リンク板5が左右一対の中間連結軸S3a, S3bで連結されて、当該中間連結軸S3a, S3bに支持された左右一対の各プーリ体P1,P2 に互いに逆方向の第1及び第2の各ベルト体V1,V2 が部分巻回されて、中間リンク台Eにおいて第1平行リンク機構LD1 の正逆両方向の回動力を第2平行リンク機構LD2 に伝達させる構成の物品の直線搬送装置において、前記一対のプーリ体P1,P2 の一方を軸方向に二分割して、各分割プーリ体P1a, P1bに対して前記一対のベルト体V1,V2 の一端部をそれぞれ固定した構成とする。
(もっと読む)
日常生活支援マニピュレータ装置
【課題】日常生活で、自らの腕のように操作できる小型、軽量、安全な日常生活支援マニピュレータ装置を実現する。
【解決手段】互いに多関節状に接続される複数のアーム構成要素は、平行リンクを構成する駆動リンク6、12および従動リンク5、11を備えたアーム構成要素を含み、駆動リンク17を備え従動リンクを備えていないアーム構成要素を含み、駆動リンク6、12、17および従動リンク5、11は、それぞれ両端が、支持体3、9、15、20に回転可能に取り付けられており、駆動リンク6、12、17は、その一端において回転軸を介して支持体3、9、15に付設されたモータにより駆動され、従動リンク5、11や駆動リンク17には、支持体9、15、20との間でバネ8、14、19が装着されていることを特徴とする日常生活支援マニピュレータ装置29を提供する。
(もっと読む)
清潔空間用ロボット
【課題】 大型の滅菌装置を用いることなく、効果的に滅菌可能なロボットを提供する。
【解決手段】 封止部188によって、清潔空間外107から清潔空間104内に汚染物質が侵入することを防ぐことができ、滅菌駆動部120を清潔空間104に配置し、動力伝達部121を清潔空間外107に配置することができる。滅菌駆動部120を動力伝達部121から分離させて、高温高圧滅菌することで、清潔空間104に属するロボット部分で雑菌が繁殖することを抑えて清潔空間104を清潔に保つことができる。また滅菌駆動部120を、動力伝達部121に対して分離することで、ロボット全体を滅菌する場合に比べて、小形の滅菌装置を用いて滅菌することができる。
(もっと読む)
産業用ロボット
【課題】薄型ガラス基板等を搬送する産業用ロボットにおいて、制御軸数を増やす事無く、安価な方法で、上下軸の姿勢変化によるガラス基板の角度変化量を最少にする産業用ロボットを提供。
【解決手段】基台0上の第1軸aに回転移動する第1リンク 1・1と、基台0上に固定されたブラケット 0・1上の第2軸bにに回転自在に支持された第1補助リンク 1・2とが第1の平行4辺形を構成し、第1リンク 1・1先端部の第3軸cとに回転移動する第2リンク 2・1と、第1ヒンジ1上の第5軸eに回転自在に支持された第2補助リンク 2・2とが第2の平行4辺形を構成し、複数の平行四辺形リンクを直列に並べた形態で構成される上下軸において、1つ以上のリンク1・1、2・1 又は補助リンク1・2、2・2 の長さを意図的に短くし、又は、平行四辺形を成す1つの軸 a〜fの軸位置を意図的に変更した。
(もっと読む)
平行保持機構
【課題】リンクの干渉を避け、比較的大きい作業領域を確保することができ、部品点数が少なく組立が容易であり製作コストを減少することができる平行保持機構を提供する。
【解決手段】平行保持機構10は、回転ジョイント22aが固定され所定長dの直径を有するプーリー12aと、回転ジョイント22bが回転ジョイント22aに対して平行を保持する位置に固定され直径dを有するプーリー12bと、両プーリーを各々回転自在な状態で接続したリンク14と両プーリーを繋ぎ且つ両プーリーを同期して回転させるタイミングベルト16とを備えている。固定された状態で両回転ジョイントの長手方向は相互に平行となっている。タイミングベルト16により両プーリーが回転すると、両回転ジョイント長手方向はyz平面内で常に平行となるため平行リンク機構の動きと同様の動きを実現できる。3自由度の空間並進平行保持機構30には平行保持機構10を用いる。
(もっと読む)
1 - 20 / 37
[ Back to top ]