
Fターム[3C007BS23]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕並列配列 (242) | 平行リンク (97) | フロッグレッグ型 (60)
Fターム[3C007BS23]に分類される特許
1 - 20 / 60
基板搬送ロボット
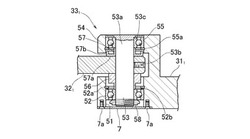
【課題】真空処理装置内で使用される基板搬送ロボットであって、ロボットアームの関節部は、一方のアーム部材に形成した上下方向に貫通する軸支孔と、軸支孔に装着したベアリングと、他方のアーム部材に固定した、ベアリングに挿入される支軸とを備えるものにおいて、ベアリングでの発塵で生ずるパーティクルによる真空処理装置内の汚損を防止できるようにする。
【解決手段】一方のアーム部材311の下面に、軸支孔51を下方から覆うカバー7が着脱自在に取り付けられる。また、支軸53が他方のアーム部材321上方に突出する上部軸部53aを有し、一方のアーム部材311に、上部軸部53aが挿入される上部ベアリング55を装着した筒部54を設ける場合には、上部ベアリング55の内輪と他方のアーム部材321との間に介設するカラー57の下端に、外周に立上り部57bを有するフランジ部57aを形成する。
(もっと読む)
直線運動リンク機構とこれを用いた布物のたぐり展開装置

【課題】小さな形状で布辺を把持し、2つのグリッパーで持った布辺部をたぐりだし両端を把持して展開して排出するロボットハンドおよび行程長よりも本体サイズが小さな直線運動機構を提供する。
【解決手段】菱形リンク機構と、その対角線上の両支点を両端で挟むように連結した2つの同じ長さの挟持リンク機構と、挟持リンク機構どうしを連結する支点と菱形リンク機構の他の一つの支点を両端で連結した2つの同じ長さの駆動リンク機構からなる直線運動リンク機構。および前記直線運動リンク機構と2連の平行四辺形4節リンクを結合するリンク機構。2連の平行四辺形4節リンク機構を連結するリンクは支点を共有しない選択肢を持つリンク機構およびこれをもちいた布物のたぐり展開装置。
(もっと読む)
基板位置検出方法
【課題】搬送ロボットにより基板を搬送する際に、ハンド上の基板の中心位置の検出精度を向上できるようにした基板位置検出方法を提供する。
【解決手段】ハンド7に、搬送経路上の所定位置に設定した検出点PSに基板の周縁があるか否かを検出するセンサで検出可能な指標として、R方向に所定距離LR0離れた第1指標73と第2指標74とを設ける。第1指標73が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を基準位置として、基準位置から、第2指標74が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置までの変位量LRを算出し、この変位量LRと指標73,74間の距離LR0との比を補正係数として算出する。そして、基板の周縁の各箇所が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を、当該R方向位置と基準位置との偏差に補正係数を乗算して補正する。
(もっと読む)
真空処理装置、電子部品の製造方法及び真空処理プログラム
【課題】 基板搬送用ロボットのフィンガーの変形を精度よく検出する。
【解決手段】 基板を保持可能なフィンガーを有した基板搬送用のロボット、及び、前記ロボットにより基板を搬出入させるための基板搬送口を備えた搬送チャンバと、前記基板搬送口に着脱可能に接続され、前記搬送チャンバ内部に連通する開口を有し、外部に対して密閉された内部空間を形成する筐体、及び、前記内部空間に挿入される前記フィンガーの変形を検出するための変位センサを備えたセンシングポートと、前記搬送チャンバに設けられる排気口を介して、前記搬送チャンバ及び前記筐体内部を排気する排気手段と、前記排気手段により前記搬送チャンバ及び筐体内部を減圧させた状態で、前記筐体の内部空間に挿入されたフィンガーの形状の前記変位センサによる検出結果を取得する制御手段と、を備える。
(もっと読む)
搬送装置、基板処理システム及び姿勢制御機構
【課題】保持台の姿勢を正確に制御することができ、また高速で移動させても保持台がふらつくことがない搬送装置を提供する。
【解決手段】搬送装置に、第一の姿勢保持リンク56、及び第二の姿勢保持リンク57を設ける。第一の姿勢保持リンク56の一端と第二の姿勢保持リンク57の一端とは連結軸53によって回転可能に連結される。保持台21の基部プレート27にレール51,52を取り付ける。連結軸53にローラ54,55を所定の軸線の回りを回転可能に取り付ける。ローラ54,55はレール51,52のローラ転走部51a,52aに接触するように配置される。保持台21を移動させるとき、ローラ54,55がローラ転走部51a,52aを転がり運動する。
(もっと読む)
ダブルスカラーアーム
【課題】
ダブルスカラーアームの左右一対のアームを、バックラッシなしで同期させる。
【構成】
ダブルスカラーアームの先端のハンドにより、物品を移載する。左右一対のアームの先端の軸を上下一対の屈曲部材により互いに連結する。屈曲部材の一方を、一方の軸に一端を固定して時計回りに巻回し、他方の軸に反時計回りに巻回して他端を固定する。屈曲部材の他方を、一方の軸に一端を固定して反時計回りに巻回し、他方の軸に時計回りに巻回して他端を固定する。
(もっと読む)
搬送装置及び真空装置
【課題】搬送物や周囲の雰囲気温度が比較的低い環境下においても当該温度が高い環境下においても搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、駆動源からの動力が伝達される複数のアームを有する伸縮自在なリンク機構20と、リンク機構20の動作先端部において第3の左アーム3L、第3の右アーム3Rを介して連結され基板10を載置するための載置部5とを備える。載置部5の基板搬送方向下流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10をリンク機構20に向かう方向へ付勢する下流側付勢機構7が設けられ、載置部5の基板搬送方向上流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10を基板搬送方向へ付勢する上流側付勢機構9が設けられている。
(もっと読む)
ロボットの動作診断方法、ロボットの制御装置、ミニエンバイロメントシステムの制御装置、ロボット、及びミニエンバイロメントシステム
【課題】ロボット動作を診断して不具合を回避することができ、かつ、異常部位の詳細表示やパネル上でのロボット動作の再現により、メンテナンス時間を短縮できるロボットの動作診断方法を提供する。
【解決手段】複数の駆動軸をそれぞれ駆動する複数のモーター、マニピュレータ、及びセンサを有し、駆動軸によりマニピュレータを移動させるロボットの動作診断方法において、少なくとも1つの駆動軸に対し、ロボットの診断対象とする動作パターンを設定し、ロボットの初期状態での動作パターンにおいて、複数回計測したモーターを制御する制御装置の複数の入出力信号と、センサまたはマニピュレータを制御する機器の複数の入出力信号とを判定データとし、新たに計測した判定データを診断データとし、統計的パターン認識方法により診断データが判定データに含まれるかを判別することにより、新たに計測した時のロボットの動作が正常であるか判定する。
(もっと読む)
基板搬送ロボット
【課題】大重量の基板を高い信頼性で搬送できる基板搬送ロボットを提供する。
【解決手段】本ロボットは、それぞれが基板を保持する第1及び第2基板保持部11,12を有し、さらに、第1及び第2基板保持部11,12が装着された第1及び第2アーム機構13,14を備える。第1アーム機構13は、主旋回軸を含む平面に関して互いに対称に配置された一対の第1アーム19を有し、第1アーム19のそれぞれが、その中間部にて内向きに折曲可能に構成されている。第2アーム機構14は、主旋回軸を含む平面に関して互いに対称に配置された一対の第2アーム20を有し、第2アーム10のそれぞれが、その中間部にて外向きに折曲可能に構成されている。
(もっと読む)
ダイレクトドライブモータ
【課題】雰囲気汚染を回避しながらも、高精度にロータの回転角度を検出でき、更に信頼性を確保できるダイレクトドライブモータを提供する。
【解決手段】隔壁13の円板部13aの肉厚が、円筒部13bの肉厚より厚くなっているので、寸法精度や機械精度および温度変化に起因して、隔壁13に変形が生じた場合でも、薄肉の円筒部13bが先に変形することで、隔壁13の軸方向応力や曲げ応力を緩和することができ、それによりシール不良や破壊などを防ぐことができる。
(もっと読む)
移載機の給電及び信号伝送方法
【課題】代替装置を持たない搬送設備の移載機においても、移載機に搭載した各種センサに断線などのリスクをなくして効率的に電源を供給し、かつ信号をも伝送するようにした移載機の給電及び信号伝送方法を提供すること。
【解決手段】アーム3の伸縮により搬送物の移載を行う移載機Tにおいて、アーム3の伸縮と干渉しない領域に固定側給電線54を敷設し、稼動体側に受電コイル53を設置し、移載機の伸縮領域の範囲内で非接触で連続給電あるいは間欠給電を行うようにする。
(もっと読む)
吸着装置及びワーク搬送装置
【課題】吸着パッドを所定の真空度にする時間を短縮することができる吸着装置及びワーク搬送装置を提供する。
【解決手段】本発明のワーク搬送装置1は、搬送対象物であるワークwの表面に配置される吸着パッド21を真空ポンプ22により真空引きしてワークwを把持する吸着装置2と、吸着パッド21を支持するクロスバー31とクロスバー31を移動させる駆動アーム32と駆動アーム32を移動可能に支持する支持部材33とを有する構造部材3と、を備えており、前記吸着装置2は、支持部材33に形成された真空タンク4と、真空タンク4と吸着パッド21との間に配置された第一吸気流路5と、第一吸気流路5に配置された電磁弁6と、真空タンク4と真空ポンプ22との間に配置された第二吸気流路7と、を有する。
(もっと読む)
フロッグレッグ型移載装置
【課題】ワークを同一水平面内で直線移動させて移載するフロッグレッグ型移載装置において、横揺れ防止を実現すると共に、パーティクルの発生を減らす。
【解決手段】フロッグレッグ型移載装置において、2本のフリーアームは、基台に一端が第1回動軸を介して取り付けられている。移載アームは、2本のフリーアームの他端に第2回動軸34を介して連結され、ワークを載置する。同期機構35は、2本のフリーアーム同士を連結して横揺れを抑制する。同期機構35において、直線移動部材47は、移載アームの移動方向にスライド自在に支持されている。回動部材48は、直線移動部材47に回動自在に支持されている。2本のロッド部材45は、第2回動軸34に軸支された第1端57と、回動部材48に軸支された第2端58とを有する。
(もっと読む)
移載機
【課題】フォークに光センサの配線をすることなくワークの有無を検知することができる移載機を提供すること。
【解決手段】屈伸可能に連結された第1アーム1及び第2アーム2を左右に1対配設し、第1アーム1の基部をそれぞれ駆動軸3に接続するとともに、第2アーム2の先端部でフォーク4を支持し、各アーム1、2の屈伸によりフォーク4を進退するようにした移載機において、フォーク4上のワークWの有無を検知する光センサ10を移載機本体7に設けるとともに、フォーク4上のワークWの有無によって開閉する遮光板12と、その作動機構13からなるシャッタ機構を有するミラー11を配設し、光センサ10の光をミラー11に反射させることによりワークWの有無を検知できるようにし、かつ、光センサ10をミラー11が通過する経路から外れた位置に取り付ける。
(もっと読む)
相対ティーチング方法
【課題】 高い信頼性を持って迅速に相対ティーチングができるようにした搬送ロボットの相対ティーチング方法を提供する。
【解決手段】 基板Sをロボットハンド13にて支持した状態で同一平面内を旋回及び伸縮動作させ、前記旋回方向に沿って配置された複数の処理室L、P1乃至P3間で基板を搬送する搬送ロボット1に対し、その搬送動作を教示するとき、いずれか一の処理室に対して伸縮動作する際に基準となる座標データを教示し、この座標データに基づいて他の処理室に対して伸縮動作する際に基準となる座標データを教示する。一の処理室における座標データを教示する際にその伸縮軌道データを取得し、他の処理室における座標データを教示する際に、前記一の処理室及び他の処理室への搬送ロボットの伸縮ストロークが相互に異なると、前記伸縮軌道データから前記ロボットハンドの位置を補正する。
(もっと読む)
搬送装置及び真空装置
【課題】高温環境下において搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、複数のアームを有する伸縮自在なリンク機構20と、その動作先端部において第3の左アーム3L、第3の右アーム3Rを介して連結され、基板10を載置するための載置部5とを備え、載置部5には、基板10の側部と当接して係止する係止部5a、5bが設けられる。第3の左アーム3L、第3の右アーム3Rの先端部には、第3の左アーム3L、第3の右アーム3Rに設けられた凸状の駆動支持部31L、31Rと、凸状の駆動支持部31L、31Rによって駆動される従動機構部6とを備える付勢手段9が設けられる。従動機構部6は、凸状の駆動支持部31L、31Rと係合摺動可能な長孔62を有する従動部61と、従動部61の長孔62内における凸状の駆動支持部31L、31Rの移動に応じて載置部5の係止部5a、5bに向って案内移動される付勢部6aとを有する。
(もっと読む)
基板搬送装置
【課題】
基板の搬送方向の直進性に優れた基板搬送装置を提供する。
【解決手段】
基板搬送装置1は、補助回動ギア32と回動プーリ31とを連結するリンク部材33を備え、リンク部材33はリンク部材33の連結長(貫通孔33Aの中心P−貫通孔33Bの中心Qの間の長さ)を調整するためのリンク長さ調整部34とを備えている。このため、各部材の機械加工精度に依存して組立誤差が生じても、リンク部材33の長さ(連結長)を調整部34により調整して、補助回動ギア32の中心Oと回動プーリ31の中心Rとの間の長さと、連結長とを同じに調整できる。従って、リンク部材33により、回動プーリ31と補助回動ギア32との回動量つまり回動プーリ31と回動ギア30の回動量を一致させて、基板の搬送方向の直進性を向上させることができる。
(もっと読む)
搬送装置及び真空処理装置
【課題】簡素な構成で旋回半径を小さくすることができ、しかも搬送速度が大きい搬送装置を提供する。
【解決手段】本発明の搬送装置1は、一方の端部A、Bに第1及び第2の駆動軸11、12が同心状に配設された第1及び第2のアーム21、22を有する。第1及び第2のアーム21、22の他方の端部C、Dには、第3及び第4のアーム23、24の一方の端部E、Fが、支軸23a、24aを中心としてそれぞれ回転自在に取り付けられている。第3及び第4のアーム23、24は、その他方の端部G、Hが、連結軸30aを中心として同心的に回転できるように構成されている。第2のアーム22の駆動軸12の回転動力を第3のアーム23に伝達するための第1の動力伝達機構4と、第1のアーム21の一方の端部Cにおける回転動力を連結軸30aに伝達するための第2の動力伝達機構5が設けられている。
(もっと読む)
回転駆動装置
【課題】2本の駆動用回転軸を回転駆動させるための各モータユニットが、両駆動用回転軸共通の回転中心軸方向における同一位置に設けられた回転駆動装置における駆動用回転軸が短く、小型化及び軽量化を図れることを利用し、装置を大型化することなく、設計上及びコスト上の負担の少ない上下移動機構を有する回転駆動装置を提供すること。
【解決手段】駆動用回転軸117,127の下方に、前記回転中心軸の延長線上に中心軸を有する昇降軸139の昇降により前記駆動用回転軸117,127を同時に上下に移動させる上下移動機構を配置する。
(もっと読む)
搬送装置及び真空装置
【課題】高温環境下において搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、駆動源からの動力が伝達される複数のアームを有する伸縮自在なリンク機構20と、リンク機構20の動作先端部において隣接する第3の左アーム3L、第3の右アーム3Rによって連結され基板10を載置するための載置部5とを備える。載置部5には、基板10の側部と当接して係止するための係止部5a、5bが設けられる。リンク機構20の隣接する第3の左アーム3L、第3の右アーム3Rには、基板10の側部と当接し基板10を載置部5の係止部5a、5bに対して付勢する付勢部6aを有する弾性の付勢部材6が固定される。付勢部材6は、第3の左アーム3L、第3の右アーム3Rの相対的な角度関係に応じて載置部5の係止部5a、5bに対する付勢部6aの距離が変化するように構成されている。
(もっと読む)
1 - 20 / 60
[ Back to top ]