
Fターム[3C007ES08]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 指部材を有するもの (1,203) | 多節型 (279) | 各関節ごとに独立した駆動源を有するもの (122)
Fターム[3C007ES08]に分類される特許
1 - 20 / 122
ロボットハンドの制御装置
【課題】簡易な構成で硬さの異なる被接触体に対応することができるロボットハンドの制御装置を提供する。
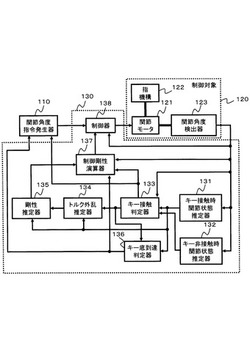
【解決手段】本発明の一形態に係るロボットハンドの制御装置は、指が被接触体に接触した時における関節の状態を推定する接触時関節状態推定器131と、指が被接触体に接触していない時における関節の状態を推定する非接触時関節状態推定器132と、指が被接触体に接触したか否かを判定する接触判定器133と、関節に印加されるトルク外乱を推定するトルク外乱推定器134と、被接触体の剛性を推定する剛性推定器135と、接触判定結果が接触状態の場合、関節の制御剛性を、指が被接触体の押し込み状態を維持できる最小値に演算する制御剛性演算器137と、関節モータ121を制御する制御器138と、を備える。
(もっと読む)
ハンドおよびロボット

【課題】異なる大きさや形状のワークを確実に把持すること。
【解決手段】直線軸に沿って互いに接近する向きあるいは遠ざかる向きにスライドする1組のスライド部と、スライド部のそれぞれに固定され、先端部分に把持爪を有する把持部とを備え、把持部は、上記の直線軸および把持爪の先端を含む平面と直交する向きの回転軸まわりに回転する関節部、たとえば、把持爪の先端向きを変更するように回転する第1の関節部と、第1の関節部の位置を変更するように回転する第2の関節部とを備えるようにハンドおよびロボットを構成する。
(もっと読む)
モーター、ロボットハンドおよびロボット
【課題】モーターの用途に最適なモーター出力(トルク)とトルクリップルのバランスを容易に調整することができるモーターを提供する。
【解決手段】円柱形状の回転体と、回転軸と、前記回転軸を回転可能に支持する基体と、前記回転体の外周に対向配置される円筒形状のステーターと、を備え、前記回転体は円周方向にN極とS極とが交互に配置される磁石を有し、前記ステーターは空芯巻線を複数有し、前記空芯巻線は、前記回転体の回転方向に直交する第1配線、および第2配線と、前記回転体の回転方向に延伸する第3配線、および第4配線と、前記第1、第2、第3および第4配線の各配線端部を繋ぎ、8角形形状の斜辺を形成する4つの第5配線と、を有し、前記空芯巻線が、前記磁石の磁極の幅に相当する幅をa、相数をm(m:3以上の整数)とした場合に、前記空芯巻線の中心間の間隔がa/mで配置されるモーター。
(もっと読む)
コアレスモーター、コアレスモーターを搭載したロボットハンド、およびロボット
【課題】巻線効率が高く、且つ、高トルクなコアレスモーターを提供する。
【解決手段】中空の空芯巻線の内側に、円筒形状の永久磁石を設けてコアレスモーターを
構成する。また空芯巻線は、電線を菱形形状に巻回することによって形成する。そして、
菱形形状の一方の対角線は永久磁石の中心軸と平行とし、他方の対角線は、永久磁石の中
心軸に対して、永久磁石の磁極が切り換わる角度の1.2倍から1.6倍の角度範囲とな
る長さに設定する。こうすれば、菱形形状に巻回して空芯巻線を構成するコアレスモータ
ーの回転トルクを向上させることができる。また、電線が菱形形状に巻回されているので
、高い巻線効率を実現することが可能となる。
(もっと読む)
電気機械装置およびそれを用いたアクチュエーター、モーター、ロボット、ロボットハンド。
【課題】電気機械装置を小型化する技術を提供する。
【解決手段】電気機械装置の一種である動力発生装置100は、中心軸110と、永久磁
石123を有するローター121と、ローター121の外周に配置されたステーターであ
る電磁コイル124と、ローター121に連結され、回転駆動力の伝達に用いられる回転
機構部130と、前記回転機構と負荷とを接続する負荷接続部133とを備える。ロータ
ー121には、中心軸110と永久磁石123との間において、少なくとも中心軸110
の軸方向の一方に開口し、回転機構部130の少なくとも一部を収容する収容空間として
の凹部1212が形成されている。回転機構部130は、ローターと接続または一体に形
成される入力部と、ステーターと接続または一体に形成される固定部と、負荷接続部13
3と接続または一体に形成される出力部とを有する。
(もっと読む)
モーター、ロボットハンドおよびロボット
【課題】コイル端部ロスを生じない巻線構造によって、コアレスでありながら高トルクのモーターを提供する。
【解決手段】円柱形状の回転体と、前記回転体の中心軸方向に延設される回転軸と、前記回転軸を回転可能に支持する基体と、前記回転体を覆う円柱缶状のステーターと、を備え、前記回転体は、円柱底面部に円周方向にN極とS極とが交互に配置される第1磁石と、円柱側面部に円周方向にN極とS極とが交互に配置される第2磁石と、を有し、前記ステーターは、前記回転体の前記円柱底面部に対向する部位と、前記回転体の前記円柱側面部に対向する部位と、中央に空隙部と、を備える複数の空芯巻線を有するモーター。
(もっと読む)
モータ装置及びロボット装置
【課題】高トルクの出力が可能であるモータ装置及びロボット装置を提供することができる。
【解決手段】回転可能に設けられた回転子と、当該回転子の軸周りに捩れ振動を発生させる駆動用振動部と、回転子の回転軸方向に当該回転子を挟む位置に設けられ、回転軸方向に振動して回転子と駆動用振動部との回転力伝達状態及び回転力伝達状態解除を切り替える一対の伝達用振動部と、駆動用振動部による振動が回転子に伝達されるように駆動用振動部の振動及び一対の伝達用振動部の振動を調整する制御部とを備える。
(もっと読む)
モーター、ロボットハンドおよびロボット
【課題】高出力が得られるコアを備えるコイルと、コアを備えない配線と、を備え電流の切換頻度を少なくすることにより、ブラシの長寿命化を実現する小型モーターを提供する。
【解決手段】回転可能に支持された回転軸の中心に直交し、前記回転軸に固定される回転体と、基体に固定され円周方向にN極とS極とが交互に配置された磁石と、を備え、前記回転体は、前記回転軸の回転中心を通る放射状の直線に平行に延伸された1以上の駆動配線と、円周状に配置された複数の渦巻状導体配線と、前記渦巻状導体配線内に配置されたコアと、前記駆動配線に接続された第1整流子と、前記渦巻状導体配線に接続された第2整流子と、を備え、前記第1整流子に接触し、電力を供給する第1ブラシと、前記第2整流子に接触し、電力を供給する第2ブラシと、を備え、前記渦巻状導体配線は、前記回転軸の軸方向の平面視において、前記駆動配線と重ならないモーター。
(もっと読む)
側面設置型力覚提示インターフェイス
【課題】
操作空間が広く、人間の指へそれぞれ3次元の力覚及び仮想物体の重量感を提示でき、さらに、圧迫感や装置の重量感を与えることがなく、安全で、小さな仮想物体を扱うことが可能な側面設置型力覚提示インターフェイスを提供する。
【解決手段】
力覚提示インターフェイスは操作者Hの手の指の運動に追従可能な複数の触覚指21〜25を有する触覚指ベース16と、触覚指ベースの空間運動を可能とするアーム機構110と、操作者Hの手の位置及び姿勢に連動させてアーム機構110を駆動制御するとともに、指の動きに連動させて触覚指を駆動制御するコントローラを有する。力覚提示インターフェイスは触覚指ベース16を操作者Hの手の甲側において甲から離間した状態で、触覚指に対して前記操作者の指に取付けするための指フォルダ26が設けられている。
(もっと読む)
モーター、ロボットハンドおよびロボット
【課題】半導体上のパターン配線と、半導体内に位置検出回路、制御回路を形成することによってブラシレスの簡単な構造の小型コアレスレスモーターを提供する。
【解決手段】対向配置された基体と、前記基体に回転可能に支持された回転軸と、前記回転軸に直交し、前記回転軸に固定され前記基体の対向領域内で回転可能に配置される磁石と、を備える回転子と、前記基体の対向する一方の面、または両方の面に固定され、前記磁石と前記基体との間に配置される半導体装置と、を備え、前記磁石は、前記回転軸中心に対して円周方向にN極とS極と、を交互に配置され、前記半導体装置は、前記回転軸中心を通る放射方向の直線に平行に延伸された1以上の駆動配線と、前記駆動配線の電流を制御する制御回路と、前記磁石の前記半導体装置との相対位置を検出するセンサーを含む検出回路と、を含むモーター。
(もっと読む)
直流モーター、直流モーターを搭載したロボットハンド、およびロボット
【課題】小型で高トルクの直流モーターの提供。
【解決手段】回転軸112の中心から所定角度毎に、N極またはS極の何れかの極性に交互に着磁した円板形状の永久磁石をローター110とし、ローター110の着磁面と向かい合わせて電流経路基板120を設ける。電流経路基板120には、ローター110の回転軸112を中心として所定角度の中心角を有する扇形形状の半径部分に沿って形成した往き側経路と、扇形形状の円弧部分に沿って形成した戻り側経路とを少なくとも一部に含んだ第1の電流経路と、第1の電流経路の往き側経路と戻り側経路とに囲まれた扇形形状の領域内の位置に、渦巻き状に形成した電流経路を少なくとも一部に含む第2の電流経路とを形成する。ローター110からの磁界の下で第1および第2の電流経路に電流を流すと、ローレンツ力および磁力を用いて回転トルクを発生させることができるので、小型で高トルクな直流モーターを構成できる。
(もっと読む)
モーター、ロボットハンド及びロボット
【課題】位置センサー及び制御回路を備え、信頼性が高く小型のブラシレスモーターを提供する。
【解決手段】モーターは、円柱状であり、円周方向にS極及びN極を交互に有する回転子と、回転子の円形面に接続された回転軸と、円形面に対向する第1の面を有し、第1の面に円周方向に沿って配列された複数の渦巻状導体パターンを有する半導体素子と、を備え、前記半導体素子は、前記渦巻状導体パターン内に位置するコアと、前記渦巻状導体パターンに流れる電流を制御する制御回路と、前記回転子の磁極の位置を検出する位置センサーと、を含む。
(もっと読む)
コアレスモーター、ロボットハンドおよびロボット
【課題】同一方向の回転であれば電流の流れる方向を切り替える必要が無く、よって簡単な構造でブラシレスとし、且つコアレスレスモーターを提供する。
【解決手段】回転軸と、前記回転軸に固定され、前記回転軸の軸方向にN極とS極とを配置し、前記回転軸の回転中心を中心として円柱状に形成された永久磁石を備える磁石体と、前記磁石体の前記永久磁石の前記N極面、もしくは前記S極面に対向配置される第1の面を有し、前記磁石体の前記回転中心において前記磁石体と相対的に回転可能に配置される半導体装置と、を備え、前記半導体装置は、前記第1の面に前記回転中心から放射状に配置される1以上の導体配線と、前記半導体装置は、少なくとも前記導体配線に流す電流の方向を切り替える回路を含む駆動回路と、前記磁石体と前記半導体装置との相対的な回転位置を検出する検出回路と、を含むコアレスモーター。
(もっと読む)
作業システムおよび作業方法
【課題】沸騰水型原子炉のジェットポンプ近傍などの狭隘な領域に設置された配管の溶接部の洗浄、点検、検査予防保全、補修などの作業を容易に行えるようにする。
【解決手段】作業システムに、ベース24と、ベース24を水平に対して傾斜させる第1ロータリシリンダ27と、ベース24を上下に移動させる伸縮ガイド19と、アーム20と、アーム20を回動させる回転ローラ25と、アーム20に取り付けられた検査プローブ23とを備える。アーム20は、リンク22で結合された複数の部分からなる。アーム20は、隣り合う部分を結合するエアシリンダ21の伸縮により、その形状が変化する。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
多指ハンドユニットおよびロボット
【課題】骨格フレームの曲げ剛性およびリンク部の収納スペースを維持しながらリンク部の小型化を図ることが可能な多指ハンドユニットを提供する。
【解決手段】この多指ハンドユニット1は、複数の指部10、20および30を備え、少なくとも指部10は、内部に収納部141dが配置される中空の骨格フレーム141を有する根元リンク部14と、根元リンク部14を回動させる関節駆動部11とを含む。
(もっと読む)
ロボットハンド
【課題】把持部の把持面を把持対象物の形状に良好に倣わせることができるロボットハンドを提供する。
【解決手段】本発明の実施の形態に係るロボットハンド100は、基部110と、把持対象物を把持する把持部120(第1把持部121、第2把持部122)と、把持対象物を把持したとき、把持部121、122の把持面1212a、1222aが把持対象物の形状に倣うように、把持部121、122における基部110からの延在方向軸回りへの回転と、把持部121、122の開閉方向への回転と、を許容するなじみ部130と、を備える。
(もっと読む)
ロボット用ハンドユニットおよびロボット
【課題】指部の複数の姿勢において、関節駆動部に対する負荷を軽減することが可能なロボット用ハンドユニットを提供する。
【解決手段】このハンドユニット1(ロボット用ハンドユニット)は、根元リンク部124および中間リンク部125と、中間リンク部125を根元リンク部124に対して相対的に回動させる関節駆動部122と、中間リンク部125の根元リンク部124に対する複数の回動位置において、作業対象を把持する際に根元リンク部124に対して係合することによって中間リンク部125が根元リンク部124に対して相対的に回動するのを規制するストッパ部16とを含む人差し指部12を備える。
(もっと読む)
ロボットアームの制御方法及びプログラム
【課題】作業性の高いロボットアームの制御方法を提供する。
【解決手段】ロボットアームの制御方法は、外表部が柔軟部材600で覆われたロボットハンド(ハンド部120)を備えるロボットアームの制御方法であって、被挟持部材が置かれる載置面に柔軟部材600を押し付け、推定した柔軟部材600のつぶれ量を予め設定されたつぶれ量より大きくする工程と、ロボットハンドで被挟持部材を挟持する工程と、を備える。柔軟部材600を所定のつぶれ量で押し潰して被挟持部材を挟持するので、被挟持部材を確実に挟持でき、作業性を向上させることができる。
(もっと読む)
1 - 20 / 122
[ Back to top ]