
Fターム[3C007ET01]の内容
マニピュレータ、ロボット (46,145) | 指部材の動作形態 (600) | 揺動型 (249)
Fターム[3C007ET01]の下位に属するFターム
支軸が1つ (87)
支軸が2つ以上 (99)
交差型 (10)
平行移動型(平行リンク機構によるもの) (24)
Fターム[3C007ET01]に分類される特許
21 - 29 / 29
ナノピンセット装置および微小試料の把持方法
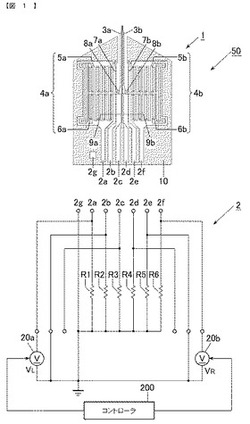
【課題】 微小物体を正確に把持したり解放したりすることができるナノピンセット装置を提供すること。
【解決手段】 ナノピンセット1の静電アクチュエータ4a,4bを構成する固定電極5a,5bおよび可動電極6a,6bは、いずれも櫛歯形状を呈しており、相互に複数の櫛歯が噛み合うように対向配置されている。固定電極5a,5bは台座10に固定され、可動電極6a,6bは細いビーム状の支持部7によって台座10に弾性的に固定されている。電源回路2により固定電極5a,5bと可動電極6a,6bとの間に直流電圧を印加すると、クーロン力により可動電極6a,6bが移動してアーム3を駆動する。ナノピンセット装置50では、静電アクチュエータ4a,4bをロック状態とすることにより、微小物体を確実に把持することができる。
(もっと読む)
ハンドリング装置

【課題】 成膜装置において、真空容器の真空状態を維持したまま真空容器内の被移送物を容易に移送できるハンドリング装置を提供する。
【解決手段】 ハンドリング装置4は、把持部4a、操作部4b、連結部4c、及び連結部支持部4dを備える。把持部4aは、真空容器10の内部に配置され、互いに開閉可能に結合された一対のロッド43及び44を有する。操作部4bは、真空容器10の外部に配置され、ロッド43及び44の開閉を操作するためのハンドル41a及び41bを有する。連結部4cは、把持部4aと操作部4bとを互いに連結し、操作部4bの動きをロッド43及び44へ伝達するシャフト42a及び42bを有する。連結部支持部4dは、連結部4cが挿通された屈曲可能な筒状部分47を有し、筒状部分47の一端及び他端のそれぞれにおいて真空容器10及び連結部4cに気密に固定されている。
(もっと読む)
ロボットの制御装置
【課題】 バックラッシを生じる減速機を用いても十分な精度が得られ、かつ余分なエネルギの消費を抑制できる。
【解決手段】 ロボットの制御装置は、モータ11と、モータ軸12に接続されるエンコーダ13と、モータ軸12に接続され、モータ軸12の回転を減速する減速機14と、減速機14の駆動軸16に接続される位置検出器10と、駆動軸16に接続される駆動用フレーム15と、減速機14と駆動用フレーム15との間に設けられ、駆動用フレーム15に、駆動軸16の回転方向と逆方向の外部拘束力を負荷するねじりバネ18と、駆動用フレーム15の向きが所定の範囲内にある場合、ねじりバネ18から駆動用フレーム15への外部拘束力の負荷を制限する制限ピン21と、エンコーダ13および位置検出器10からの出力に基づいて、モータ11の回転を制御するモータ制御部17とを含む。
(もっと読む)
積層型多関節部駆動機構及びその製造方法、それを備えた把持ハンド、ロボットアーム、ロボット
少なくとも2つの弾性変形部(1A)を有する骨材(1)と、骨材に積層されかつ空圧の駆動源(4)に連結された2系統の配管(2a,2b)を有する積層型空圧配管部材(2)と、その部材に積層されかつ各変形部に対向する関節部(3a,3b)に配置されかつ配管に連結された空圧動作室(16A,16B)に空圧が印加されると対応する関節部が変形可能な平面型関節部変形部材(3)とを備える。  (もっと読む)
(もっと読む)
遠隔操作装置
【課題】 スレーブハンドと作業対象物との距離を距離検出手段により検出し、前記距離に応じて遠隔操作の操作態様を変更することで、作業者への負担を軽減することができる遠隔操作装置を提供すること。
【解決手段】 操作者が操作するマスタハンド1の操作により、スレーブハンド11が油圧駆動される。スレーブハンド11と作業対象物Aとを撮像手段21a,21bにより撮像して両者の距離を演算する。演算された距離が所定値以上の場合においては、前記マスタハンド1の操作にかかわらず作業対象物Aに対してスレーブハンド11を近づける駆動動作を含む自動動作モードが選択され、前記距離が所定値未満である場合においては、前記マスタハンド1の操作に基づいてスレーブハンド11を駆動することができる手動動作モードが選択されるようになされる。
(もっと読む)
ロボットハンド装置
【課題】 本発明では、スペース効率を向上させることができるとともに、小指から順に折り曲げていくというような人間らしい把持動作を行うことができるロボットハンド装置を提供することを目的とする。
【解決手段】 ロボットハンド装置1は、基部10から延設される4本の指機構20と、各指機構20を作動させる1つのモータ30と、を備えている。さらに、このロボットハンド装置1には、各指機構20を作動させるために各指機構20に連結される4つの回動ローラ50と、各回動ローラ50に対してモータ30からの動力を異なるタイミングで伝達するように構成される動力伝達機構60と、が設けられている。
(もっと読む)
アクチュエータ及びロボットハンド
【課題】進行波により対象物を搬送する上で、十分な搬送性能を実現することができ、構造が簡単であり、かつ小型化に適したアクチュエータを提供する。
【解決手段】アクチュエータ基板11上にフレキシブル基板14を重ね合わせて固定し、フレキシブル基板14上に複数の伸縮駆動素子12を並設して固定し、各伸縮駆動素子12の上端にシート状の弾性部材13を載せて係止し、制御駆動部15をフレキシブル基板14を通じて各伸縮駆動素子12に接続している。制御駆動部15は、フレキシブル基板14を通じて各伸縮駆動素子12に電圧を順次印加し、各伸縮駆動素子12をZ方向に順次伸縮させて、弾性部材13を変形させて波打たせ、弾性部材13に進行方向がX方向の進行波を形成する。この弾性部材13に対象物を載置すると、この弾性部材13の進行波により対象物がX方向とは逆方向に搬送される。
(もっと読む)
脆弱物の把持装置
【課題】 障害物が密集した場所やインビトロ等の狭い作業空間において、脆弱物を把持および/または切断するためのロボットハンドの提供。
【解決手段】 一対の把持爪と、把持用アクチュエータと、把持用アクチュエータおよび把持爪とを連結する把持力伝達系とを備え、前記把持力伝達系の一部または全部が弾性特性を有する材料からなり、前記把持用アクチュエータの駆動により前記把持力伝達系および/または前記把持爪に撓みを生じさせながら脆弱物を把持するロボットハンド。
(もっと読む)
手術支援装置
【課題】本発明は、各駆動部の負荷をより正確かつ速やかに操作器にフィードバックすることができ、操作性を向上させることができる手術支援装置を得ることを目的とするものである。
【解決手段】マニピュレータ3にマニピュレータ駆動機構が設けられている。マニピュレータ駆動機構21には、ダイレクトドライブ方式のスレーブ側モータ14が設けられている。操作器1の関節部には、ダイレクトドライブ方式のマスタ側モータ6が設けられている。操作器1は、マニピュレータ3からの力覚フィードバックを受けるように制御される。
(もっと読む)
21 - 29 / 29
[ Back to top ]