
Fターム[3C007ET05]の内容
マニピュレータ、ロボット (46,145) | 指部材の動作形態 (600) | 揺動型 (249) | 平行移動型(平行リンク機構によるもの) (24)
Fターム[3C007ET05]に分類される特許
1 - 20 / 24
ロボットハンド装置
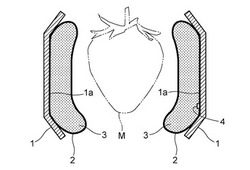
【課題】柔軟な対象物を痛めたり、傷つけたりすることなく、把持することが可能なロボットハンド装置の提供。
【解決手段】ハンド先端部に、対象物Mを把持する一対の把持体1と、各保持体1の把持面1aを覆うように固定された柔軟膜により構成される袋体2と、袋体2に充填されたゲル状流体3とを有するロボットハンド装置であり、対象物Mが把持される際に、把持体1と対象物Mとの接触面に対して略一定の面圧が作用し、局所的な接触圧が発生しないため、柔軟な対象物Mを痛めたり、傷つけたりすることなく、把持することが可能となる。
(もっと読む)
ロボットハンド

【課題】任意の形状を有する対象物体を安定して把持することができるロボットハンド機構を提供することにある。
【解決手段】ロボットハンド機構においては、第1及び第2可動部305A、305Bが直動機構304に移動可能に支持される。第1可動部305Aは、接続機構401を介して指部101Aの受動回転部104及び指部101Cの受動回転部104に結合される。第2可動部305Bは、接続機構401を介して指部101Bの受動回転部104及び指部101Dの受動回転部104に結合される。直動機構が駆動モータ301によって駆動されると、第1及び第2可動部305A、305Bが互いに反対向きに移動される。第1及び第2可動部305A、305Bの直動運動に伴って、接続機構401によって各受動回転部104が回転される。この結果、指部101A、101B、101C、101Dの駆動方向が変更される。
(もっと読む)
把持装置
【課題】簡素な構造からなり、少数のアクチュエーターで駆動することができるとともに、多様な目標物体に対応することができる把持装置を提供する。
【解決手段】把持装置1は、グリッパーの対向する左右の2指がともに平行リンクで構成される。左右の指部25、35の把持面には、薄く細かい物体を捕捉するための爪部が、内側に向かって突出する爪部が、先端縁に沿ってそれぞれ形設されている。爪は、その断面が45度程度の鋭角をなし、開閉方向の内側に向かって突設している。したがって、左右の指部25、35を閉成すると、爪の鋭角な先端が対象物体と接地面の間に潜り込むので、掴み易くなる。
(もっと読む)
チャッキング装置
【課題】装置の上下寸法をコンパクトに抑えうる簡単な駆動力伝達機構を備えたチャッキング装置を提供する。
【解決手段】装置本体上に揺動可能に枢支され、四節リンク機構を構成する互いに平行な第一揺動レバー及び第二揺動レバーと、この四節リンク機構を構成し、両揺動レバーを揺動可能に連結する連結アームと、両揺動レバーを揺動駆動する送りネジ機構と、それぞれがチャック部材を備え、相互に接近離間することによりチャック部材同士が対象物を把持及び把持解除するように構成された第一及び第二の支持部材とを備えており、各揺動レバーにおける、四節リンクの対角の関節より外方の点においてそれぞれ対応する支持部材に連結されており、両揺動レバーが揺動することにより、支持部材同士が相互に接近離間するように構成されている。
(もっと読む)
チャッキング装置
【課題】異なる形状のワークに対してワンタッチで対応可能なチャッキング装置を提供する。
【解決手段】装置本体上に配設された、第一及び第二のチャック部材を有する第一支持部材並びに第三及び第四のチャック部材を有する第二支持部材と、両支持部材をY軸方向に相互に接近離間させてワークを把持、解除するよう駆動する把持駆動部材と、各チャック部材を第一の位置と第二の位置とに揺動変位させる変位駆動部材とを有し、各チャック部材がワークを把持するフィンガーを有し、第一の位置では第一及び第三のフィンガーと第二及び第四のフィンガーとがX軸方向に離間し、第一及び第二のフィンガーと第三及び第四のフィンガーとがY軸方向に接近し、第二の位置では第一及び第三のフィンガーと第二及び第四のフィンガーとがX軸方向に接近し、第一及び第二のフィンガーと第三及び第四のフィンガーとがY軸方向に離間する。
(もっと読む)
把持装置
【課題】センサを使用せず、簡単な構造で、様々な重さを有する柔軟物から高硬度物を把持することが可能な把持装置を提供する。
【解決手段】把持装置10は、被把持物12の上方に配置され、被把持物12の把持に先駆けて上移動する支持体15と、支持体15の左右両側にそれぞれ基部が回動自在に連結され、先部が基部より左右外側の下方位置に配置され、基部を中心として同期して回動する左右対称形状の第1、第2の平行リンク20、21と、第1、第2の平行リンク20、21の先部に回動自在に連結された左右の連結部材26、27と、左右の連結部材26、27の内側にあって、基部が左右の連結部材26、27に回動自在に連結された第3、第4の平行リンク32、33と、第3、第4の平行リンク32、33の先部に設けられ、垂直状態を維持しながら対向配置される左右のパッド13、14とを有し、第3、第4の平行リンク32、33は水平に対して上向き傾斜している。
(もっと読む)
マニピュレータ装置
【課題】オペレータがマニピュレータ装置のアームユニットの位置を的確に認識することができ、操作を容易にすることができる。
【解決手段】マニピュレータ装置が、ハンド側旋回動作軸を回転中心として旋回可能に腕部の他端に連結されたハンド部を備えるアームユニットと、使用者の手により操作される操作部と、ハンド側旋回動作軸と同じ方向に配置された操作側旋回動作軸を回転中心として操作部を旋回可能に腕部に連結する連結部と、操作部と連結部との間に介在して配置され、操作側旋回動作軸回りに作用する回転力を検出する力検出用センサとを備える操作ユニットと、力検出用センサにより検出された回転力の大きさに応じてハンド部を旋回させる駆動装置と、駆動装置によりハンド部に付与される駆動力を操作部に伝達し、ハンド部の回動角度に応じて、操作部を旋回させる連動機構とを備える。
(もっと読む)
マニピュレータ装置
【課題】オペレータがマニピュレータ装置のアームユニットの位置を的確に認識することができ、操作を容易にすることができる。
【解決手段】マニピュレータ装置が、ハンド側旋回動作軸を回転中心として旋回可能に腕部の他端に連結されたハンド部を備えるアームユニットと、使用者の手により操作される操作部と、操作部を腕部に連結する連結部と、操作部と連結部との間に介在して配置され、ハンド側旋回動作軸と同じ方向に配置された操作側旋回動作軸回りに作用する回転力を検出する力検出用センサとを備える操作ユニットと、力検出用センサにより検出された回転力の大きさに応じてハンド部を旋回させる駆動装置とを備える。
(もっと読む)
ロボットハンド
【課題】簡素な構成でフィンガーが指根元から指先にかけて順に曲がる動作を実現する。
【解決手段】ロボットハンド1は、モータ31からの回転動力が入力される遊星歯車ユニット44と、遊星歯車ユニット44から出力される回転動力が伝達される第1及び第2駆動軸3,4と、第1及び第2駆動軸3,4に夫々駆動される第1及び第2関節9、12を有するフィンガーF1,F2と、を備え、遊星歯車ユニット44は、太陽歯車65と、太陽歯車65の外歯に噛み合う遊星歯車66と、遊星歯車66の公転に連動するように遊星歯車66に接続された遊星腕68と、遊星歯車66の自転に連動するように遊星歯車66の外歯に噛み合う内歯歯車67とを有し、太陽歯車65がモータ31に接続され、遊星腕68が第1駆動軸3に接続され、内歯歯車67が第2駆動軸4に接続され、内歯歯車67の運動抵抗を遊星腕68の運動抵抗よりも大きくする抵抗発生手段が設けられている。
(もっと読む)
ワーク把持装置
【課題】取出し対象のワークの周囲にある物との干渉が起こりにくいワーク把持装置を提供する。
【解決手段】把持装置1は、吸着力によりワーク5を保持可能な吸着パッド22、および、それが一端に取り付けられた棒状部21を有する一次捕捉機構20と、ワーク5を挟み込んで保持する把持爪31,32と、駆動装置50、および駆動装置50の駆動力を把持爪31,32に伝達する伝動機構40と、を有している。伝動機構40は、把持爪31,32が吸着パッド22よりベース板10側に位置する退避位置と、把持爪31,32が吸着パッド22を越えて突出する把持位置との間で、把持爪31,32を棒状部21の軸線方向に移動させ、かつ、把持爪31,32を、棒状部21の軸線方向に把持位置へと移動させるのと同時に、把持爪31,32の間の距離を狭めるように移動させる。
(もっと読む)
ワークの把持方法および装置
【課題】柔軟物であるワークの形状や位置を認識し、把持するための方法および装置の提供。
【解決手段】フィンガーの姿勢変換を3自由度で行うワークの把持装置であって、ロボットアームへの取付面(105)を有し、取付面(105)に対する法線方向に中心軸をもつ回転軸駆動部(101)と、回転軸駆動部(101)に、回転軸駆動部(101)の中心軸と所定の角度α1を構成する中心軸をもつように接続された回転駆動部(102)と、回転軸駆動部(102)に、回転軸駆動部(102)の中心軸と所定の角度α2を構成する中心軸をもつように接続された回転駆動部(103)と、回転駆動部(103)に接続された柔軟物であるワークを保持するためのフィンガー機構と、これらの作動を制御するロボットコントローラと、を備え、前記ロボットコントローラは、フィンガー機構の姿勢を計算することによりワークを所望の把持姿勢で把持するワークの把持装置。
(もっと読む)
環状部材の内周面に圧着される吊上げ冶具
【課題】従来は、ロボットアーム、又は装置付設のアームに設けた冶具本体に、チャック爪、又は爪を設け、このチャック爪、又は爪を、被製版ロール又はボビンに係止し、この被製版ロール又はボビンを吊上げる構造があった。この構造では、このチャック爪、又は爪に、被製版ロール又はボビンの重量が、全て掛かる構造である。従って、比較的、軽い物の吊上げには有効であるが、他の重量のある物には不向きと考えられる。
【構成】本発明は、ステータの空間部に挿入される棒状の吊上げ本体の放射方向に向って拡縮自在とする構造で、かつ平面視して吊上げ本体の三箇所に、基端部の側面が枢着された複数枚のプレートと、複数枚のプレートの自由端部の側面に枢着された複数枚のクランプ板と、複数枚のクランプ板の放射側側面の下端に設けた爪片で構成したステータの内周面に圧着される吊上げ冶具であり、ステータを、確実かつ安全に吊架できる。
(もっと読む)
把持機構
【課題】種々の形状の把持対象物体を安定して把持することが可能な小型軽量な把持機構を提供することにある。
【解決手段】把持機構10では、第2の指リンク12は第1の指リンク11の一方先端にて第1の軸線A1周りに回転可能であり、第1の指リンクは第1の軸線に直交する第2の軸線A2に沿って相互に開閉運動が可能である。これにより、第2の指リンクを互いに逆方向に回転させつつ、第1の指リンクを互いに逆方向に開閉させることにより、第2の指リンクの周面を把持対象物体の表面に沿わせることができ、一対の第2の指リンクにより把持対象物体を把持・解放することができる。このため、把持可能な把持対象物体の形状が限定されることはなく、特に円盤状の把持対象物体を安定して把持できる。更に、指リンク自体は必要最小限の大きさで良いため、機構そのものの質量の増大を抑えて軽量化することができ、搭載する駆動手段や機構部材を小型化できる。
(もっと読む)
産業用ロボットのハンド装置
【課題】ワーク把持力の大小にかかわらずフィンガーが抜け落ち、ワークが落下することがない、かつハンド装置全体を交換することなくワークの形状に合わせてフィンガーのみをコスト安に交換できる産業用ロボットのハンド装置を提供。
【解決手段】各フィンガー取り付けベース 6下面61(図3(a))に各フィンガー取付ベース 6に直交する方向に形成されたT字状断面をもちかつ下面に開口をもつ横方向T字状水平盲溝66と、上部に各T字状水平盲溝溝66と嵌まり合う横方向T字状頭部71と、T字状頭部71から垂下するフィンガー部77からなる交換可能なフィンガー 7と、T字状水平盲溝66にフィンガーの横方向T字状頭部71が嵌まり合った時の抜け止め部材 2とを有する。
(もっと読む)
産業用ロボットのハンド装置
【課題】電源ダウン時、非常停止時又は制御システムで異常を検出した場合など、ハンド装置の把持装置への電源供給を遮断せざるを得ないとき、把持装置が把持力を維持することができ、ワークを把持している場合にはワークを落下させることがない産業用ロボットのハンド装置を提供。
【解決手段】サーボモータ3を作動させることによりフィンガー7を開閉動作させてワークをクランプし、サーボモータ3を停止させ、次にエアシリンダ14のロッド14’を作動させて偏心軸13をガイド溝16内で回転させ、スライド4をフレーム1に対し偏心軸13の偏心量相当分だけボールねじ2の軸方向にスライドさせてフィンガー7を開閉させてワークを把持するようにした。
(もっと読む)
ロボットのハンド装置
【課題】 狭隘な環境で重量の大きなワークを容易かつ確実に把持することができるロボットのハンド装置を提供する。
【解決手段】 4節リンクを構成する第1リンク手段61と2節を共用して第2リンク手段64を構成し、第1モータM11によって第1リンク手段61を駆動するとともに、第2モータM12によって第2リンク手段64を駆動し、第1把持部63と第2把持部62とを個別に動作するロボットハンドを実現する。
(もっと読む)
産業用ロボットのハンド装置
【課題】ワーク把持力の大小にかかわらずフィンガーが抜け落ち、ワークが落下することがない、かつハンド装置全体を交換することなくワークの形状に合わせてフィンガーのみをコスト安に交換できる産業用ロボットのハンド装置を提供。
【解決手段】各フィンガー取付ベース43下面内側に対向して形成された(各フィンガー取付ベース43下面外側に内側に向けて形成してもよい)T字状断面をもつT字状水平盲溝46と、上部に各T字状水平盲溝46と嵌まり合うT字状頭部47とT字状頭部47から垂下するフィンガー部48からなる交換可能なフィンガー44と、T字状水平盲溝46にフィンガー44のT字状頭部47が嵌まり合った時の抜け止め部材 45a,45bとを有する。
(もっと読む)
挟持装置及びこの挟持装置を有する設備
【課題】バイメタルを用いて、ワークにダメージを与えないように、ワークを微小な力で挟持することができ、かつ、信頼性、実用性及び生産性などに優れた挟持装置及びこの挟持装置を有する設備の提供を目的とする。
【解決手段】挟持装置1は、平行リンク機構の固定リンクとしてのベースプレート11と、原節としての一対のバイメタル13と、連接棒としての当接部材14とを有し、温度変化によりバイメタル13が変形すると、平行リンク機構により当接部材14が挟持方向に移動してベアチップ3を押圧し、ベアチップ3を挟持する。
(もっと読む)
分割された駆動軸を備えた把持機構
本発明は、複数部分の駆動軸(6)、クランク、ベルトまたは歯車軸によって駆動され、互いに対する部分の心出しおよび駆動部分から、把持フィンガまでの、次の部分へのトルクの伝達が、軸方向歯部、好ましくはピン(8)および穿孔を備えたピニオン伝動装置を用いて達成される、少なくとも1本の可動把持フィンガ(10)を備えた、機械、ロボットおよび操作装置のための把持機構に関する。駆動軸は、好ましくは運搬支持軸受を備えている。駆動軸(6a、6b、6c)の分離の結果として、動作ユニットおよび伝達装置を収容するための2つのキャビティ(2a、2b)を伴う1つの部材内にハウジングを鋳造することが可能である。把持フィンガ(10a、10b)または把持フィンガ(14a、14b)を駆動するレバー(10d)が、軸方向に駆動軸に外部的に固定される。 (もっと読む)
把持フィンガあたり2本の駆動軸を備えた把持機構
本発明は、2本の駆動軸(5b、6)、クランク、歯車、鎖、ベルトまたは歯付ベルト軸によって動作機構(1、10a、10b、11b)に連結することによって動作させられる少なくとも1本の可動把持フィンガ(11b)を備えた、機械、ロボットおよび操作装置のための把持機構に関する。2つの被駆動レバー(10a、10b)によって把持フィンガ(11b)を動作させ、次に各々駆動軸によって駆動される結果として、経路またはその範囲を通して180°をこえる回転を通して把持フィンガ(11b)を動かして、したがって、ひっくり返るかまたは不安定な位置に入ることなく力およびトルクをしっかりと伝達することが可能である。本発明によれば、駆動軸(5b、6)は囲まれかつ一体的な把持ハウジング(1)内に完全に収容され、ほこりおよび汚れから保護され、かつ密閉して密封されるために、軸方向に少なくとも2つの部分に分けられる。駆動軸の異なる部分が、お互いに心出しされて、好ましくは穿孔およびピン(8)を備えたピニオン歯車の形で、軸方向歯部を用いて確実に接続される。駆動軸は、好ましくはキャリア支持軸受を有する。 (もっと読む)
1 - 20 / 24
[ Back to top ]