
Fターム[3C007ET02]の内容
マニピュレータ、ロボット (46,145) | 指部材の動作形態 (600) | 揺動型 (249) | 支軸が1つ (87)
Fターム[3C007ET02]に分類される特許
1 - 20 / 87
トング式吊具
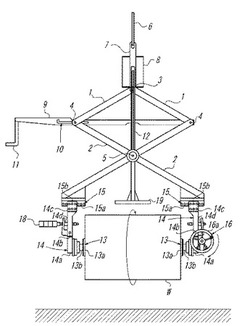
【課題】
ワークの自重を利用したリンク機構の回転動作でワークを挟込んで吊持するトング式吊具について、装置構成が小型,簡素であるという利点が損なわれず、ワークの吊持作業の安全性が確保されるようにする。
【解決手段】
ワークWの自重を利用したリンク機構の回転動作でワークWを挟込んで吊持するものである。相対してワークWを挟込む挟込支持部13がリンク機構を構成するトングアーム2の下部にそれぞれ回転可能に取付けられている。一方のトングアーム2には、一方の挟込支持部13を回転駆動する回転駆動部16が取付けられている。回転駆動部16は、手動の操作ハンドル16aで回転操作されるウオームギア16b,ウオームホイール16cのギア噛合構造からなる。
(もっと読む)
ロボット、ロボット用ハンド

【課題】対象物を確実に把持して運搬するロボット、ロボット用ハンドを提供することを課題としている。
【解決手段】2つの爪部を備え、各爪部における他方の爪部との対向面に凹部が形成されて、各爪部が基端を揺動軸として揺動することで凹部にて対象物を把持するロボットであって、各爪部の前記凹部は、爪部の先端部と揺動軸との間に、基端側の面と、先端側の面とを有し、爪部を揺動軸の軸方向に軸視した場合、基端側の面を含む直線と先端側の面を含む直線とが交差する点を基点とし、基点を通る線を基線とし、基端側の面の縁線における揺動方向の内側の端点を通り基線と直交する線を直行線とした場合、基線と先端側の面を含む直線とのなす角の角度αが0度より大きく90度未満であり、直行線と基端側の面を含む直線とのなす角の角度βが0度より大きく90度未満であり、基線における基点から直行線までの長さdが0より大きい。
(もっと読む)
寸法測定装置および寸法測定装置を備えた荷搬送ロボット
【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
ロボット
【課題】対象物を逃がさず且つ確実に決められた位置で把持することが可能なロボットを提供する。
【解決手段】一対の指部12と一対の指部12が接続された本体部11とを有し、一対の指部12の一端部14が本体部11と離間する位置に設けられた第1回転軸13の周りに回転可能に接続され、一対の指部12の他端側が第1回転軸13を中心として対象物が載置された載置面と平行な面で揺動することにより一対の指部12を開閉させて対象物を把持する把持部10Aと、対象物と把持部10Aとを相対移動させる移動装置と、移動装置を制御して把持部10Aを対象物に向けて相対移動させ、対象物の周辺に一対の指部12を配置させた後、把持部10Aを制御して一対の指部12を載置面と平行な面で開閉させ、対象物の側方から一対の指部12の間に対象物を挟み込ませ、3点以上の接触点で把持部10Aに対象物を把持させる制御装置と、を備えている。
(もっと読む)
医療用マニピュレータ
【課題】対象物をより安定して把持することができる医療用マニピュレータを提供する。
【解決手段】対象物を把持する医療用マニピュレータ1は、先端側に設けられ、開閉する第1鉗子片11及び第2鉗子片12と、第1鉗子片及び第2鉗子片の基端側に接続され、軸線方向に進退させることにより第1鉗子片及び第2鉗子片を開閉させる操作部材20とを備え、第1鉗子片及び第2鉗子片のそれぞれに設けられ、閉じる際に互いに接近して対象物と接触する把持面11A、12Aは、ヤング率が120ギガパスカル以下の金属材料で形成されていることを特徴とする。
(もっと読む)
把持装置
【課題】一対の開閉レバー部の開閉方向に沿った横幅を小さくすることができ、小スペースで設置することが可能であること。
【解決手段】ロッド軸Oに沿って上下動可能とされ、下端部に連結ブロック41が取り付けられたロッド部2と、左右軸L1方向に沿って向かい合うように配設されると共に、中間部3cが前後軸L1に平行な支点軸部50に軸支された一対の開閉レバー部3と、連結ブロックと開閉レバー部の上端部3aとをそれぞれ連結すると共にロッド部の上下動に伴って開閉レバー部を左右軸方向に揺動させるリンク機構4と、を備え、開閉レバー部には、中間部から上端部に至る部分の少なくとも一部に切欠部55が形成され、一対の開閉レバー部が、切欠部内にロッド部及び連結ブロックを入り込ませた状態で左右軸方向に向かい合うように配設され、それぞれの上端部が前後軸方向に沿ってロッド部及び連結ブロックの両側に位置している把持装置を提供する。
(もっと読む)
ロボットハンド
【課題】把持部の形状が異なる複数種類のワークを別々に把持する場合に、作動を中断することなくかつ部品を交換することなく、ワークの把持部を把持することができ、かつ把持部の形状が大きくことなっても対応でき、使用していない部分がワーク等に干渉するおそれが少ないロボットハンドを提供する。
【解決手段】把持部5aの形状が異なる複数種類のワーク5を別々に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。1対の爪12の少なくとも一方は、長手方向の異なる位置に、複数種類のワークA、B、Cの把持部に、それぞれ対応した形状の複数の凹溝12a、12b、12cを有する。
(もっと読む)
ロボットハンドとその爪部材交換方法
【課題】 形状又は寸法の異なるワークを把持することができ、交換用の部品の収容スペースを小さくでき、かつその交換のためアクチュエータが不要であるロボットハンドとその爪部材交換方法を提供する。
【解決手段】 ワークを把持するロボットハンド10。複数の末端爪部材12と、末端爪部材同士の間隔を開位置と閉位置の間で開閉するチャック装置14と、末端爪部材に着脱可能に片持ち支持された複数の先端爪部材16とを備える。先端爪部材16は、ワークに接触してこれを把持する把持面を有する。
(もっと読む)
ロボットハンド
【課題】 直径の異なる円筒形部分を有するワークの前記円筒形部分をその径方向に把持する場合に、円筒形部分の直径が大きく異なっても、作動を中断することなくかつ部品を交換することなく、ワークの把持部を安定して把持することができるロボットハンドを提供する。
【解決手段】 直径の異なる円筒形部分5aを有するワーク1の円筒形部分をその径方向に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。爪12は、チャック装置により開閉される開閉部材12aと、開閉部材に爪の長手方向に伸縮可能に取り付けられた先端部材12bと、先端部材を爪の長手方向に伸縮させるアクチュエータ12cとを有しており、開閉部材12aと先端部材12bは、ワーク1の円筒形部分5aに接触してこれを把持する互いに交差する把持面13a,13bをそれぞれ有する。
(もっと読む)
制御回路簡略化ロボット
【課題】制御回路、アクチュエータ、把握機構を軽減し、きめ細かいロボット製作やメンテナンスを可能にする。
【解決手段】制御装置の解決手段についてはプログラムを収めるメモリのアドレスを指定する装置として二つ以上の加算または減算のみを行うカウンタと、そのどちらを加算または減算するかを切り替える装置を取り付ける事により、メモリアドレスのジャンプを行う回路を廃し回路の複雑化を防ぐ。アクチュエータの機構に関する解決手段としては一本の出力軸を複数のモーターが共有し、そのモーターの中のひとつだけを正転用、残りのモーターを逆転用として取り付ける事でモータードライブ回路の単純化を実現する。物体の把握機構におけるアクチュエータ過負荷対策として複雑化してしまう傾向に対しては、錘を用いて地球の重力を利用した把握機構を製作することにより、アクチュエータへ直接過負荷が加わる事を防ぐ。
(もっと読む)
把持装置および把持装置を備えた布地処理ロボット
【課題】簡易な構成で、多種の対象物に対して複数の機能を有した把持装置および把持装置を備えた布地処理ロボットを提供することである。
【解決手段】把持装置200は、固定把持部材240、可動把持部材261、スライド装置220、把持本体部210およびモータ270からなる。把持装置200においては、把持本体部210に固定された固定把持部材240に対して、スライド装置220により可動把持部材261を直線的に移動させ、かつモータ270により可動把持部材261を回動することにより固定把持部材240の先端部および可動把持部材261の先端可動部材262を近接させ、対象物である布地(洗濯物)を把持するものである。
(もっと読む)
医療用マニピュレータ
【課題】体腔内からのガスリークを可及的に抑制することができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、中空の連結シャフト18と、連結シャフト18内に挿通されるワイヤ80aと、連結シャフト18の一端側に設けられ、ワイヤ80aを軸線方向に進退駆動するプーリ70aと、連結シャフト18の他端側に設けられ、ワイヤ80aの進退駆動によって動作される先端動作部12と、ワイヤ80aの一部を囲繞して該ワイヤ80aに密着固定されると共に、連結シャフト18の内面に対して摺動可能であることにより、該連結シャフト18内を先端動作部12側とプーリ70a側とに仕切る気密シール100とを備える。
(もっと読む)
マニピュレータ
【課題】開閉するエンドエフェクタを機械的に駆動操作する操作部における操作性を向上させる。
【解決手段】マニピュレータ10は、グリッパ軸入力部104を含む操作部14bと、エンドエフェクタ1300の向きを変える1以上の姿勢軸を含む先端動作部12と、操作部14bと先端動作部12を連結する連結シャフト18と、姿勢軸を駆動するモータ60、62と、グリッパ軸入力部104の人手による操作を機械的に伝達して、エンドエフェクタ1300を駆動するエンドエフェクタ駆動機構1320aとを有する。グリッパ軸入力部104は、開閉軸106を基準にして開閉する第1指掛部108及び第2指掛部110を備える。第1指掛部108は固定され、第2指掛部110が第1指掛部108に対して相対的に開閉動作し、第1指掛部108と第2指掛部110が閉じることによってエンドエフェクタ1300が閉じる。
(もっと読む)
医療用ロボットシステム
【課題】高い自由度を得るとともに、操作者が先端動作部に加わる外力を確実且つ簡便に感知可能にする。
【解決手段】医療用ロボットシステム10は、人手によって操作されるジョイスティック21と、ジョイスティック21の動きに連動して電気的に駆動されるロボットアーム18と、ジョイスティック21と一体に設けられ、人手によって操作されて第1ワイヤ34を進退させるトリガレバー46と、ロボットアーム18の先端に設けられたマニピュレータ12とを有する。マニピュレータ12の先端動作部56は、第1ワイヤ34と機械的に接続されて駆動されるグリッパ52と、該グリッパ52の向きを変える関節62とを有する。
(もっと読む)
遠隔操作用把持工具
【課題】被把持物を把持しながらその遠隔操作棒の軸心方向に対する傾斜角度を容易に調節できる遠隔操作用把持工具を提供する。
【解決手段】遠隔操作棒17の先端に連結されるジョイント部材9を回転自在に保持する工具基台2に、固定側把持腕部3が回動支軸23により回動自在に支持され、固定側把持腕部3に可動側把持腕部4が回動自在に連結され傾斜した押圧ガイド斜面14aを有する押圧部材14を先端に備えた作動部材13がジョイント部材9の回転により工具基台2から可動側把持腕部4に対し接離方向に進退され且つ可動側把持腕部4に設けた受圧部材19の球状の支点部19aが回動支軸23の軸心とほぼ同一面上で押圧ガイド斜面14a上に当接され、固定側把持腕部3を手動操作で回動支軸23回りに回動したときに支点部19aが押圧ガイド斜面14a上で転動する状態で支点部19aを支点に可動側把持腕部4を回動させる角度調節機構15を備えている。
(もっと読む)
医療用器具の製造方法及び医療用器具
【課題】医療用器具の先端部の鋏を、対象物を切断し易いように高精度に組み立てる。
【解決手段】鋏機構1300をユニットとして組み立てる。鋏機構1300は、重ねた一対のエンドエフェクタ部材1308を基端の軸部で所定の擦り合わせ状態でボルト体1217ト及びナット1219により開閉可能に締結する。ボルト体1217は軸線方向に貫通形成された中心孔1217dを有する。連結シャフト18先端に連結されるカバー1160の筒内に鋏機構1300を挿入すると共に、受動板1158に対してリンク1220a、1220bによりエンドエフェクタ部材1308を接続する。鋏機構1300とカバー1160の内面との間に形成される隙間にスペーサ1340を配置する。カバー1160の孔1307とボルト体1217の中心孔1217dとに対し、カバー1160の外面側からピン1196を嵌挿する。
(もっと読む)
医療用マニピュレータ
【課題】医療用マニピュレータにおける先端動作部の動作角度を維持したまま、医療用マニピュレータの小型化を図る。
【解決手段】医療用マニピュレータ10は、進退動作するワイヤ56aと、ワイヤ56aに両端が接続された受動ワイヤ252aと、先端動作部12であるエンドエフェクタ104と、基端側から順に、伝達部材152と、該伝達部材152と一体化して形成された三日月形受動体155、及び折り返しプーリ350とを有する。受動ワイヤ252aが進退動作することによって、伝達部材152も進退動作することで、エンドエフェクタ104は動作する。三日月形受動体155は、進退動作に伴って折り返しプーリ350方向へ移動するが、折り返しプーリ350の基端側が、欠損部155cに入り込む。
(もっと読む)
張力検出手段及びそれを用いたマニピュレータ
【課題】構成の単純化とともに小型化及び低コスト化を実現できる張力検出手段及びそれを用いたマニピュレータを提供することにある。
【解決手段】マニピュレータ1では、関節部であるプーリ23はワイヤ20の張力により駆動され、一方向に回転する。この際、長手方向について張力検出手段13の拘束部材40の両端の間の距離S0より、拘束部である溝42に拘束されているワイヤ20の長さL0が長くなるため、ワイヤ20に生じる張力が拘束部材40に作用する。これにより、拘束部材40は変形し、歪ゲージ41が取り付けられる第5の面40Eに垂直な方向に歪むことになる。この歪量を歪ゲージ41で検出することで、ワイヤ20の張力、すなわちプーリ23の力量を検出するようになっている。
(もっと読む)
手術用マニピュレータ及び手術用マニピュレータシステム
【課題】 少ないアクチュエータの数でワイヤの張力調整を行うこと。
【解決手段】 手術用マニピュレータ11は、その先端側でピッチ方向に回転可能な支持体19と、ヨー方向にそれぞれ独立して回転可能となるように支持体19に支持された第1及び第2の先端プーリ21,22と、プーリ21,22にそれぞれ一体化された第1及び第2のブレード24,25と、第1のプーリ21に固定された第1及び第2のワイヤ51,52と、第2のプーリ22に固定された第3及び第4のワイヤ53,54と、第1〜第4のワイヤ51〜54を押し引きする第1〜第4のモータ56〜59とを備えている。第1及び第2のワイヤ51,52は、引張力が作用したときに、相反する方向に第1の先端プーリ21を回転させ、第3及び第4のワイヤ53,54は、引張力が作用したときに、相反する方向に第1の先端プーリ22を回転させる。
(もっと読む)
駆動機構
【課題】線状動力伝達部材の張力を調整できるとともに、構成の単純化及び小型化を実現する駆動機構を提供することにある。
【解決手段】駆動機構10では、駆動部であるアクチュエータ部31と一体に形成される流体給排部であるパイプ32の雄ねじ部33の一部と基端側壁部60の雌ねじ部64とが螺合することにより、アクチュエータ部31及びパイプ32が基端側壁部60に固定される状態で支持される。すなわち、流体給排部であるパイプ32が駆動部被支持部となっている。また、駆動部被支持部であるパイプ32の雄ねじ部33の雌ねじ部64との螺合位置が調整可能となっている。雄ねじ部33の雌ねじ部64との螺合位置を調整することにより、ワイヤ20のプーリ23に対する張力が調整される。すなわち、駆動部被支持部であるパイプ32に設けられる雄ねじ部33が線状張力伝達部材であるワイヤ20の張力を調整する張力調整部となっている。
(もっと読む)
1 - 20 / 87
[ Back to top ]