
Fターム[3C007ET03]の内容
マニピュレータ、ロボット (46,145) | 指部材の動作形態 (600) | 揺動型 (249) | 支軸が2つ以上 (99)
Fターム[3C007ET03]に分類される特許
1 - 20 / 99
ロボットハンド及びロボット装置
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされており、2つの指部101,102の回転部材110の相対位置を変更する第1指部移動機構150を備え、第1指部移動機構150により、2つの指部101,102の回転部材110の回転軸が互いに近づく方向または遠ざかる方向に2つの指部101,102の相対位置が切り換えられる。
(もっと読む)
ロボットハンドの挟み込み軽減機構及びロボットハンド

【課題】高い安全性と大きな指先力を確保できるロボットハンドの挟み込み軽減機構を提供する。
【解決手段】本発明の一形態に係るロボットハンドの挟み込み軽減機構1は、駆動機構6から伝達される駆動力によって開閉する一対のハンド部2を備えるロボットハンドの挟み込み軽減機構であって、ハンド部2が開方向に回転駆動するときのみ、ハンド部2に所定の大きさの負荷が作用すると、駆動機構6からハンド部2への駆動力の伝達を減少させる過負荷軽減機構7を備える。
(もっと読む)
デパレタイズロボットのロボットハンド
【課題】平面視長方形である複数の移載物を同一平面に並べた積載位置から搬出位置へ前記移載物を移し替えるデパレタイズロボットのロボットハンドを提供する。
【解決手段】移載物3の厚みより長い抱え込み爪22,22を、移載物3の一辺より長い間隔で前後一対配し、各抱え込み爪22の下端部に抱え込みロッド23を架け渡して抱え込み枠21を構成し、互いの抱え込みロッド23を平行にし、鉛直線に対して左右対称に対向させた左右一対の抱え込み枠21,21それぞれを、各抱え込み爪22の上端部に設けた揺動軸226を本体部24に軸着して前記本体部24に支持させ、前記抱え込みロッド23,23が平行を保ったまま各抱え込み枠21を揺動させるエアシリンダ26を本体部24に設けたデパレタイズロボット1のロボットハンド2である。
(もっと読む)
つかみ装置
【課題】ワークが不意に離脱するのを規制しつつ、長寿命化および作業の迅速化を図ること。
【解決手段】第1チューブ体2および第2チューブ体3と、各チューブ体2、3の両端がそれぞれ全周にわたって固定され、該チューブ体2、3との間に流体が給排される空間Aが形成された固定部材5と、該固定部材5に連結された弾性変位可能な可動部材6と、を備え、第1チューブ体2は、膨張変形したときに可動部材6を押圧して弾性変位させ、第2チューブ体3は、当該つかみ装置1とワークWとを軸線O方向に沿って相対的に接近移動させることでワークWに内挿または外挿され、可動部材6には、第2チューブ体3がワークWに内挿または外挿されるときに、弾性変位した可動部材6が復元変位することでワークWの被係合部W1に係合し、ワークWに対する第2チューブ体3の内挿または外挿が解除されるのを規制する係合部16が設けられているつかみ装置1を提供する。
(もっと読む)
モーター、ロボットハンド及びロボット
【課題】位置センサー及び制御回路を備え、信頼性が高く小型のブラシレスモーターを提供する。
【解決手段】モーターは、円柱状であり、円周方向にS極及びN極を交互に有する回転子と、回転子の円形面に接続された回転軸と、円形面に対向する第1の面を有し、第1の面に円周方向に沿って配列された複数の渦巻状導体パターンを有する半導体素子と、を備え、前記半導体素子は、前記渦巻状導体パターン内に位置するコアと、前記渦巻状導体パターンに流れる電流を制御する制御回路と、前記回転子の磁極の位置を検出する位置センサーと、を含む。
(もっと読む)
コアレスモーター、ロボットハンドおよびロボット
【課題】同一方向の回転であれば電流の流れる方向を切り替える必要が無く、よって簡単な構造でブラシレスとし、且つコアレスレスモーターを提供する。
【解決手段】回転軸と、前記回転軸に固定され、前記回転軸の軸方向にN極とS極とを配置し、前記回転軸の回転中心を中心として円柱状に形成された永久磁石を備える磁石体と、前記磁石体の前記永久磁石の前記N極面、もしくは前記S極面に対向配置される第1の面を有し、前記磁石体の前記回転中心において前記磁石体と相対的に回転可能に配置される半導体装置と、を備え、前記半導体装置は、前記第1の面に前記回転中心から放射状に配置される1以上の導体配線と、前記半導体装置は、少なくとも前記導体配線に流す電流の方向を切り替える回路を含む駆動回路と、前記磁石体と前記半導体装置との相対的な回転位置を検出する検出回路と、を含むコアレスモーター。
(もっと読む)
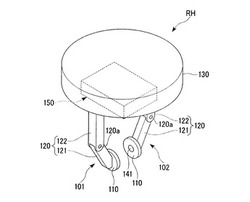
ロボットハンド
【課題】把持部の把持面を把持対象物の形状に良好に倣わせることができるロボットハンドを提供する。
【解決手段】本発明の実施の形態に係るロボットハンド100は、基部110と、把持対象物を把持する把持部120(第1把持部121、第2把持部122)と、把持対象物を把持したとき、把持部121、122の把持面1212a、1222aが把持対象物の形状に倣うように、把持部121、122における基部110からの延在方向軸回りへの回転と、把持部121、122の開閉方向への回転と、を許容するなじみ部130と、を備える。
(もっと読む)
ロボット
【課題】対象物を逃がさず且つ確実に決められた位置で把持することが可能なロボットを提供する。
【解決手段】一対の指部12と一対の指部12が接続された本体部11とを有し、一対の指部12の一端部14が本体部11と離間する位置に設けられた第1回転軸13の周りに回転可能に接続され、一対の指部12の他端側が第1回転軸13を中心として対象物が載置された載置面と平行な面で揺動することにより一対の指部12を開閉させて対象物を把持する把持部10Aと、対象物と把持部10Aとを相対移動させる移動装置と、移動装置を制御して把持部10Aを対象物に向けて相対移動させ、対象物の周辺に一対の指部12を配置させた後、把持部10Aを制御して一対の指部12を載置面と平行な面で開閉させ、対象物の側方から一対の指部12の間に対象物を挟み込ませ、3点以上の接触点で把持部10Aに対象物を把持させる制御装置と、を備えている。
(もっと読む)
ワーク把持装置およびワーク把持方法
【課題】互いに隣接しつつこの隣接する方向に対して交差する方向にずれた位置にある複数のワークであっても容易に把持できるようにする。
【解決手段】ワーク把持装置1は、4つのワーク把持ユニット5,7,9,11により4つの部品13,15,17,19をそれぞれ個別に把持する。部品13,15の上に部品17,19が載せられる。部品13,15を把持するワーク把持ユニット5,7は、上下シリンダ27,27Aを備えており、下端のアーム37,37Aが把持フレーム3に対して上下動可能である。4つのワーク把持ユニット5,7,9,11で4つの部品13,15,17,19を把持した状態で、ワーク把持装置1全体を上昇させると、上下シリンダ27,27Aが伸長して部品13,15が部品17,19に対して下方に離間した位置関係となる。
(もっと読む)
把持装置、搬送システム、把持制御方法
【課題】把持した複数の物体のうち少なくとも1つを個別に開放する技術を提供する。
【解決手段】対向面にピン33を有し、弾力が加えられる複数のバネ爪31と、バネ爪31の対向面の間に設けられ、移動位置に応じてピン33のいずれかに当接することで一対のバネ爪31が把持しているコネクタ101を開放させるカムブロック41と、カムブロック41を垂直方向に移動させるブロック駆動部51と、一対の狭持板であって先部13がバネ爪31それぞれの間に挿入されるリジッド爪12と、リジッド爪12をバネ爪31の弾力方向に移動させる本体部11とを有する把持装置である。
(もっと読む)
食品の搬送装置
【課題】挟持部材を開操作したときの開度を、送出位置で食品を挟持するときの開度に対して払出位置で食品を払い出すときの開度が小さくなるように設定することができる食品の搬送装置を提供すること。
【解決手段】製造工程から複数個ずつ並んで送出位置Aに送出された食品Wを、挟持部材2によって一旦挟持して持ち上げ、次工程の払出位置Bに整列した状態で払い出す食品の搬送装置1において、挟持部材2を開閉操作する挟持部材操作手段3と、挟持部材操作手段3によって挟持部材2を開操作したときの挟持部材2の開度を、送出位置Aで食品Wを挟持するときの開度に対して払出位置Bで食品Wを払い出すときの開度が小さくなるように設定する挟持部材開度設定手段4とを備えるようにする。
(もっと読む)
ロボットアームのためのハンドカメラ装置
【課題】 ハンドに突出部を形成することなく、しかも、ロボットアームの制御系を複雑にすることなく、把持した把持対象物を正確に目標位置に移動、位置決め可能とする。
【解決手段】 ロボットアームのハンドに、把持対象物の位置及び方向を観測するカメラを設置し、その撮像情報に基づいて把持対象物を認識し、ハンドで把持させた後、目標位置を探索及び認識して、把持対象物を目標位置に移動させるロボットアーム及びハンドの制御装置において、ハンドの把持部に前方カメラを設けるとともに、側方にも側方カメラを設置し、ハンドが把持対象物を把持する直前あるいは直後において、前方カメラの撮像情報に基づく制御から、側方カメラの撮像情報に基づく制御に切り換える切換手段を具備させ、把持した把持対象物に視界を妨げられることなく、把持対象物を正確に目標位置に移動、位置決めすることができる。
(もっと読む)
ワークの把持方法
【課題】バラ積み状態のワークを多フィンガのハンドで把持する場合に他のワークが対象ワークの上に重なっている状態であっても、ワークの把持を可能にし、ワークの把持成功率を向上させるワークの把持方法を提供する。
【解決手段】2つの把持装置(第1乃至第4フィンガF1乃至F4)を用いてワーク(リンフォースメントW)を把持するとき、把持しようとする把持対象ワーク(把持対象リンフォースメントT)に対して把持装置を挿入する一方の把持装置挿入箇所(領域A)に他のワークとの干渉がない状態で、一方の把持装置挿入箇所に第1の把持装置(第1フィンガF1及び第2フィンガF2)を挿入して把持対象ワークを把持して持ち上げる片持ち把持工程と、第1の把持装置によって持ち上げられた把持対象ワークのまわり(領域D)に第2の把持装置(第3フィンガF3及び第4フィンガF4)を挿入して把持する両持ち把持工程と、を含むワークの把持方法。
(もっと読む)
ロボットハンド
【課題】所望位置で把持対象物を把持可能なロボットハンドを提供する。
【解決手段】把持対象物であるティッシュボックスQや紙コップTを把持する指部81を備えた把持部99は、以下のように構成されている。即ち、指部81のリンク84の把持面84aの所望位置に、把持面84aから突出する突起部84eを設けた。突起部84eは、指部81のリンク84の把持面84aの略中央に形成されている。突起部84eは、シリコンゴムなどの弾性体によって形成されている。突起部84eは、シリコンゴム、ウレタンゴム、又は、クロロプレンゴムによって形成されている。把持面84aには、荷重位置を検出可能な接触抵抗式面センサ84bが設けられている。
(もっと読む)
ロボットハンド
【課題】ワークに対して、左右1対の平面により把持する場合であっても、把持状態を安定させることを可能とするロボットハンドを提供する。
【解決手段】ワーク12を把持するロボットハンド11であって、一対の爪13、14と、一対の爪13、14の間隔を開位置と閉位置の間で開閉するチャック装置16を備える。爪の一方である爪13は、その中間位置に、閉位置において、ワーク12の表面に接触する単一の凸部分13aを有し、爪の他方である爪14は、開位置と閉位置を結ぶ開閉方向に直交する方向の2箇所に、閉位置において、ワーク12の表面に接触する一対の凸部分14aを有する、ことを特徴とするロボットハンド。
(もっと読む)
ロボットハンド
【課題】把持体を回転させるための駆動源を定位置に設置することができ、被把持物配置予定位置周りで把持体を無制限に回転させることのできるロボットハンドを提供する。
【解決手段】把持体61を移動させる第一駆動部62と、把持体を回転させる第二駆動部63とを備え、第一駆動部は、スライドシャフト64と、駆動源の出力でスライドシャフトを軸線方向に往復動させるスライド手段65と、先端部に把持体が連結された回転レバー66と、回転レバーを回転可能に支持し、所定位置に位置した状態でスライドシャフトの一端部周りで回転自在に設けられた支持体67とを備え、第二駆動部は、駆動源の出力を支持体に伝達し、支持体をスライドシャフト周りで回転させる伝達機構とを備え、スライドシャフトは、支持体に支持された回転レバーの基端部を収容する無端円環状の溝が形成されている。
(もっと読む)
移載装置
【課題】小型で高速動作が可能な移載装置を安価に提供する。
【解決手段】側面に第1と第2の円筒溝カム(11,12)、底面51に溝カム52が形成されたシリンダー4と、ピニオンギア23環装され、第1円筒溝カムにより上下するシャフト部21と、第2円筒溝カムによってシャフト部内で上下するロッド部22と、ピニオンギアに歯合して溝カムにより前後するラックギア54と、物体W1の把持と開放を相補的に行う二つ一組のチャック部31を備えたチャックユニット6aを備え、ピニオンギアはシャフト部を介してチャックユニットを旋回させ、ロッド部はシャフト部と同期して上下するとともに、シャフト部の下死点停留期間Δt2中にさらに下方の第2下死点Dd2に至り、二つ一組のチャック部はロッド部が第2下死点に至ったときに、それぞれの把持状態と開放状態を切り替え、上死点と第1の下死点までの区間ではその状態を維持する。
(もっと読む)
アーム駆動機構、及びこれを備えたマニピュレータ
【課題】先端部に作業ツールが装着されるアーム機構を大型化させることなくアーム機構を姿勢変更させることのできるアーム駆動機構及びこれを備えたマニピュレータを提供する。
【解決手段】アーム駆動機構は、一対の回転体と、両回転体に掛け渡される無端環状体と、駆動モータにより回転されるスクリューシャフトと、スクリューシャフトに螺合され、無端環状体の一部が固着されたスライダとを備え、他方の回転体が一方の回転体よりも小径に設定され、無端環状体の回転体間にある二つの対向部のうちの一方の外周側が巻き掛けられて他方の回転体側にある対向部を平行にするアイドラを備え、スクリューシャフトが一方の対向部の外周側と対向するように配置されている。
(もっと読む)
把持装置
【課題】簡素な構造からなり、少数のアクチュエーターで駆動することができるとともに、多様な目標物体に対応することができる把持装置を提供する。
【解決手段】把持装置1は、グリッパーの対向する左右の2指がともに平行リンクで構成される。左右の指部25、35の把持面には、薄く細かい物体を捕捉するための爪部が、内側に向かって突出する爪部が、先端縁に沿ってそれぞれ形設されている。爪は、その断面が45度程度の鋭角をなし、開閉方向の内側に向かって突設している。したがって、左右の指部25、35を閉成すると、爪の鋭角な先端が対象物体と接地面の間に潜り込むので、掴み易くなる。
(もっと読む)
把持装置
【課題】微小部品を把持するのに適した把持装置を提供する。
【解決手段】把持装置100は、把持部110と、本体部120と、モータ部130とを備え、取り付けプレート121によってXYZステージ等に取り付けられる。把持部110は、把持対象物を把持(狭持)するための一対のフィンガー部を備え、本体部120の内部に収容された機構及びモータ部130の内部に収容されたモータによって駆動されて、その先端が開閉することで、把持対象物を把持(狭持)する。また、把持装置100では、XYZステージ等を制御して、作業用ベース上に載置された把持対象物に対して、把持装置100全体を下降させている際に、なんらかの理由で、把持部110の先端等が、把持対象物等に接触してしまった場合、把持部110が、本体部120に対して上方に移動することができるように構成されており、それによって、把持対象物等が破損等するのを防止することができる。
(もっと読む)
1 - 20 / 99
[ Back to top ]