
Fターム[3C007EU16]の内容
マニピュレータ、ロボット (46,145) | 指部材の開閉機構 (890) | ピストン側シリンダ側両方指部材に連結 (10)
Fターム[3C007EU16]に分類される特許
1 - 10 / 10
デパレタイズロボットのロボットハンド
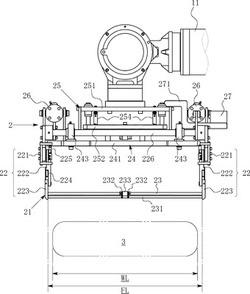
【課題】平面視長方形である複数の移載物を同一平面に並べた積載位置から搬出位置へ前記移載物を移し替えるデパレタイズロボットのロボットハンドを提供する。
【解決手段】移載物3の厚みより長い抱え込み爪22,22を、移載物3の一辺より長い間隔で前後一対配し、各抱え込み爪22の下端部に抱え込みロッド23を架け渡して抱え込み枠21を構成し、互いの抱え込みロッド23を平行にし、鉛直線に対して左右対称に対向させた左右一対の抱え込み枠21,21それぞれを、各抱え込み爪22の上端部に設けた揺動軸226を本体部24に軸着して前記本体部24に支持させ、前記抱え込みロッド23,23が平行を保ったまま各抱え込み枠21を揺動させるエアシリンダ26を本体部24に設けたデパレタイズロボット1のロボットハンド2である。
(もっと読む)
作業機械の把持装置及びこれを備えた作業機械

【課題】大きな把持力による処理対象物の把持と、微細な把持力の調整との双方が可能な作業機械の把持装置およびこれを備えた作業機械を提供する。
【解決手段】把持装置20は、一対の把持部材30A,30Bを有する。その少なくとも一方は、把持部材本体32と、可動把持部34と、ばね部材36とを含む。可動把持部34は、処理対象物Pから受ける反力によって把持部材本体32に対しその回動の向きと逆の向きに相対的に所定量だけ後退変位することが可能となるように把持部材本体32に取付けられる。ばね部材36は、可動把持部34を内向きに付勢するためのもので、その弾性変形によって可動把持部34の後退変位を許容し、かつ、その弾発力により、処理対象物Pに対する可動把持部34の接触圧を増加させる。
(もっと読む)
荷重物取扱装置
【課題】経路に沿って移動する一対の可動要素と、荷重物を移動させる距離よりも長さが短い1つの線形アクチュエータとによって、経路に沿って荷重物を取り扱うのに適した装置を提供する。
【解決手段】案内経路2と、案内経路2に摺動可能に取り付けられた一対のスライド10a、10bと、スライドに設けられ荷重物を係合する係合手段7a、7bと、それぞれのスライドを個々に案内経路2に沿って所定位置に維持するロック手段6a、6bと、スライドを駆動する線形アクチュエータ手段3を有する。線形アクチュエータを構成する空圧シリンダである第1部品4は一方のスライド10aを駆動し、ピストンである第2部品5aは他方のスライド10bを駆動する。線形アクチュエータ手段3と、ロック手段6a、6bとを制御することで係合手段7a、7bを任意の位置に移動することが可能である。
(もっと読む)
グリッパ装置
【課題】装置ボディの外形が大きくなることが無く、グリッパ爪の把持力・開閉ストロークをともに大きくする。
【解決手段】装置ボディ12中央部に基準線Sが設定されている。基準線Sから放射状にのびた3つの走行経路Lが設けられている。各走行経路Lにグリッパ爪13が移動自在に支持されている。隣り合う2つの走行経路Lにそれぞれ支持されている2つのグリッパ爪13の一方に流体圧シリンダ42のシリンダチューブ43基端部が連結されており、その他方に、同流体圧シリンダ42のピストンロッド44先端部が連結されている。
(もっと読む)
ワーク把持装置
【課題】空気圧等の流体圧により作動する流体圧シリンダを駆動源とし、強度の小さいワークを破損させることなく把持し得るようにする。
【解決手段】支持台11には流体圧シリンダ12が設けられ、第1把持部材13に対して移動自在に第2把持部材28が流体圧シリンダ12に設けられている。ピストンロッド16には第1把持部材13から離れる後退方向に移動するときに第2把持部材28に当接してピストンロッド16の後退移動を第2把持部材28に伝達する当接部35が設けられ、第2把持部材28とピストンロッド16との間には第2把持部材28に対し第1把持部材13に向かう方向のばね力を加えるばね部材38が装着されている。ピストンロッド16を前進移動させてワークWを把持した状態のもとでの引き続くピストンロッド16の前進移動によりワークWはばね部材38のばね力により把持される。
(もっと読む)
基板を移送する装置及び方法
【課題】 容器にローディングされた複数の基板を選択的にアンローディングできる基板移送装置及び方法を提供する。
【解決手段】容器内から複数の基板を引き出して移送する基板移送装置は、移送の時に複数の基板が各々載置される複數のブレードと、各々のブレード420aの一端に設置され、容器から基板を引き出す時、ブレード420aの上部に突出される引出部材500aと、各々のブレード420aから各々の引出部材500aを選択的に突出させる駆動ユニット600とを含む。引出部材500aは、中空形であり、ブレード420aの一端に形成された締結孔424aで上下移動するように設置される。引出部材500aは、上部が閉塞された形状を有する。
(もっと読む)
丸刃せん断式スリッターの刃替え方法およびそれに用いられるロボットハンド、ならびに当該ロボットハンドを備えたハンドリングロボット
【課題】丸刃等を損傷することなく、丸刃等を強く把持して高速で確実なハンドリングすることができる丸刃の刃替え方法およびそれに用いられるロボットハンド、ならびに当該ロボットハンドを備えたハンドリングロボットを提供する。
【解決手段】丸刃せん断式スリッターのアーバーに装着される丸刃および/またはスペーサを交換するための刃替え方法であって、
前記丸刃および/またはスペーサの内周面の少なくとも3ヵ所に複数のフィンガーを当接させ、
前記複数のフィンガーに丸刃および/またはスペーサの半径方向の外方へ向かう力を作用することにより、前記丸刃および/またはスペーサを把持してアーバーに装着または取外しを行なうことを特徴とする丸刃の刃替え方法。
(もっと読む)
ワーク位置決め方法及びその装置
【課題】把持装置に把持されたワークを所定の位置に位置決めする。
【解決手段】把持装置10は、固定爪22と可動爪26を備え、これらの爪22、26には把持パッド28が設置されている。弾性体36と球体38とが内部に収容された把持パッド28は、ドアミラー14(ワーク)が挟持されると、該ドアミラー14の形状に対応する形状に変形する。そして、把持パッド28の内部から気体が排気されることにより、球体38が位置決め固定される。ドアミラー14のねじ部18がドアのねじ孔52に挿入されると、所定の把持パッド28の減圧度が低減され、これにより、該把持パッド28が元の状態に復元しようとする。これに追従してドアミラー14が押圧され、該ドアミラー14が所定の位置に位置決めされる。
(もっと読む)
把持装置
【課題】把持装置に把持されたワークを所定の位置に位置決めする。
【解決手段】把持装置に設けられた把持パッド28の内部には、弾性体36と球体38とが内部に収容されている。この把持パッド28は、ワークとしてのドアミラー14が挟持されると、弾性体36が撓むことで該ドアミラー14の形状に対応する形状に変形する。そして、把持パッド28の内部から気体が排気されることにより、球体38が位置決め固定される。ドアミラー14が搬送された後、把持パッド28の減圧度が低減され、これにより弾性体36、ひいては把持パッド28が元の状態に復元しようとする。これに追従してドアミラー14が押圧され、該ドアミラー14が所定の位置に位置決めされる。
(もっと読む)
ワーク保持装置
【課題】複数のワークの種類に対応してワークを適切に保持することができるワーク保持装置を提供することにある。
【解決手段】ワーク保持装置11は、相対的に接近方向及び離間方向に移動可能な一対のベース部25、36と、一対のベース部25、36に各々設けられ、ワークWを間に介して互いに対向するクランプ面23a、23b、33a、33bを有した一対のクランパ23、33と、各ベース部25、36と該ベース部に対応するクランパ23、33との間に各々介在されて、クランパ23、33のクランプ面23a、23b、33a、33bと同一平面H1、H2上にクランパ23、33の回転中心軸線C1、C2が延在し、その回転中心軸線C1、C2を中心としてクランパ23、33をベース部25、26に回動自在に支持するガイド部41、51とを有する。
(もっと読む)
1 - 10 / 10
[ Back to top ]