
Fターム[3C007EV06]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形しない当接部の形状 (352) | トング (13)
Fターム[3C007EV06]に分類される特許
1 - 13 / 13
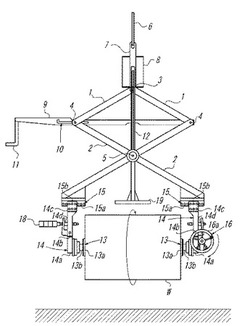
トング式吊具
【課題】
ワークの自重を利用したリンク機構の回転動作でワークを挟込んで吊持するトング式吊具について、装置構成が小型,簡素であるという利点が損なわれず、ワークの吊持作業の安全性が確保されるようにする。
【解決手段】
ワークWの自重を利用したリンク機構の回転動作でワークWを挟込んで吊持するものである。相対してワークWを挟込む挟込支持部13がリンク機構を構成するトングアーム2の下部にそれぞれ回転可能に取付けられている。一方のトングアーム2には、一方の挟込支持部13を回転駆動する回転駆動部16が取付けられている。回転駆動部16は、手動の操作ハンドル16aで回転操作されるウオームギア16b,ウオームホイール16cのギア噛合構造からなる。
(もっと読む)
ロボット、ロボットハンドおよびアタッチメント

【課題】 対象物の把持のための微妙な握力調整や位置決め精度を緩和したロボットハンドおよびアタッチメントを提供する。
【解決手段】 互いに接近および離間することによって開閉する一対の把持フィンガー7を備えており、ロボットハンド部6が保持しようとする対象物には、把持フィンガー7が把持するためのアタッチメント41が取り付けられており、前記一対の把持フィンガー7同士の対向する面7aそれぞれに対向する複数個の係止部材14が突設され、前記アタッチメント41の左右の両外表面それぞれに前記係止部材14が係止する複数個の被係止部41aが形成されている。
(もっと読む)
基板保持具、基板搬送装置および基板処理システム
【課題】 基板を支持する支持部材を有する基板保持具がシステム構成部材と接触した場合でも、支持部材の損傷を極力回避できるようにする。
【解決手段】 基板保持具であるフォーク101は、スライダ127に固定されたピックベース117と、該ピックベース117に連結された支持部材として例えば4本の支持ピック119を備えている。支持ピック119は、中空の角筒状をなす本体131と本体131の先端に着脱自在に装着された保護部材としてのキャップ133とを有している。
(もっと読む)
産業用ロボットのハンド装置
【課題】ワーク把持力の大小にかかわらずフィンガーが抜け落ち、ワークが落下することがない、かつハンド装置全体を交換することなくワークの形状に合わせてフィンガーのみをコスト安に交換できる産業用ロボットのハンド装置を提供。
【解決手段】各フィンガー取付ベース43下面内側に対向して形成された(各フィンガー取付ベース43下面外側に内側に向けて形成してもよい)T字状断面をもつT字状水平盲溝46と、上部に各T字状水平盲溝46と嵌まり合うT字状頭部47とT字状頭部47から垂下するフィンガー部48からなる交換可能なフィンガー44と、T字状水平盲溝46にフィンガー44のT字状頭部47が嵌まり合った時の抜け止め部材 45a,45bとを有する。
(もっと読む)
ワーク把持位置決め装置及び把持装置
【課題】ワークの加工装置又は検査装置において、前記フィルム状ワークを2箇所で把持して、X方向及びY方向に加えて回転方向の位置決めもすることができ、小型化及び低コスト化が可能なワーク把持位置決め装置及び把持装置を提供する。
【解決手段】駆動部は、Y方向に延びる1対の平行なYガイド5,12と、Yガイドに沿って移動可能のY台座21,31と、Y駆動部材6,13と、Y台座21,31上に設けられX方向に延びるXガイド2,9と、Xガイドに沿って移動可能のX台座22,32と、X駆動部材3,10と、を有する。把持部1,8は、ワークの一方の面に接触してこれを支持する基部と、ワークの他方に面側に設けられ水平軸を介して揺動可能な爪部材と、この爪部材を揺動させる爪駆動部と、を有し、爪部材は、爪駆動部により基部に向けて揺動したときに基部との間でワークを点で把持する。
(もっと読む)
被加工物搬送装置
金属成形機用の被加工物搬送装置が、被加工物(9)を把持するための把持端(111、121)をそれぞれ有している2つの非交差の把持アーム(11、12)をお互いに対して枢動可能に有している1対の把持具(1)を有している。2つの把持アームのそれぞれが、把持端とは反対の端部(114)において共通の案内ヘッドへと接続されるとともに、両端の間の中間領域において個々のリンク(13、14)へと接続されている。2つのリンクのそれぞれは、固定枢支部(140)を中心にして回転可能である。本発明によれば、一方の把持アームのリンクの固定枢支部が、他方の把持アームのリンクの固定枢支部よりも、この他方の把持アームにより近く配置されている。結果として、2つの把持アームがお互いから離れるように枢動するとき、外方向への枢動の程度がより小さい。  (もっと読む)
(もっと読む)
ロボットハンド、ロボットおよび溶接方法
【課題】多様な形状のワークを把持可能でかつ予定された位置と姿勢でワークを把持できるロボットハンドを提供する。
【解決手段】支持部材104と、支持部材に対して少なくとも一方が可動な第1保持部材106aと第2保持部材106bと、各々が第1保持部材の配置面に直交する方向にスライド可能に案内され第1保持部材の配置面に点在配置されている第1ロッド群302aと、各々が第2保持部材の配置面に直交する方向にスライド可能に案内され第2保持部材の配置面に点在配置されている第2ロッド群302bと、配置面間の距離を調整して固定する保持部材用アクチュエータ114と、各々の第1ロッドのスライド位置を調整して固定する第1アクチュエータ群108aと、各々の第2ロッドを第1ロッド群に向けて送りだす第2アクチュエータ群108bと、保持部材用アクチュエータと第1アクチュエータ群の固定位置を切換える制御装置を備えている。
(もっと読む)
ハンドリング治具
【課題】 筒状の搬送対象物を素手で触れることなく、容易にクランプでき、かつ、搬送し易いハンドリング治具を提供する。
【解決手段】 ハンドリング治具10は、実質的に左右対称な第1、第2のクランプアーム11、12を有し、中央で回動自在に連結された本体フレーム13と、第1、第2のクランプアーム11、12の下端部にそれぞれ取付けられて、筒状の搬送対象物14を内側から押圧する第1、第2の押圧部材15、16と、第1、第2のクランプアーム11、12の上半分の中間位置に跨がって配置され、第1、第2の押圧部材15、16が搬送対象物14を内側から押圧したことを維持するクランプ機構17と、第1、第2のクランプアーム11、12の上部に取付けられた把手18とを有する。
(もっと読む)
ハンドリング装置
【課題】 成膜装置において、真空容器の真空状態を維持したまま真空容器内の被移送物を容易に移送できるハンドリング装置を提供する。
【解決手段】 ハンドリング装置4は、把持部4a、操作部4b、連結部4c、及び連結部支持部4dを備える。把持部4aは、真空容器10の内部に配置され、互いに開閉可能に結合された一対のロッド43及び44を有する。操作部4bは、真空容器10の外部に配置され、ロッド43及び44の開閉を操作するためのハンドル41a及び41bを有する。連結部4cは、把持部4aと操作部4bとを互いに連結し、操作部4bの動きをロッド43及び44へ伝達するシャフト42a及び42bを有する。連結部支持部4dは、連結部4cが挿通された屈曲可能な筒状部分47を有し、筒状部分47の一端及び他端のそれぞれにおいて真空容器10及び連結部4cに気密に固定されている。
(もっと読む)
把持装置
【課題】 耐久性があり、ぐらつきが無く、小型で確実に把持できるペットボトルの搬送に適した把持装置を提供する。
【解決手段】 円筒状ボディの下方に径方向に貫通したガイド穴を形成したボディケース1と、内周円筒面と下方に傾斜面のあるスライドケース2をボディケースの同軸外周に配置し、ピストン3とプッシャー4および連結棒5を該スライドケースと連結し、ボディケースのガイド穴7にボールを配置してスライドケースの傾斜面13および円筒面12によりボールが中心方向に突出する把持装置を構成するとともに、ピストンの上下動に伴ってペットボトル9のネック部の凸部11下方にボールが突出したあとで、ペットボトルの上方からプッシャーが下降してペットボトルの上方を圧接することにより、上下方向に把持して搬送するものである。また、ガイド穴の角度を、中心側に対して外周側を低く構成する。
(もっと読む)
ハンド及びハンドリングロボット
【課題】 エンドエフェクタとしてのハンドにおいて、属性が異なる種々の物体を安定して把持できるとともに、様々な姿勢で置かれた物体を容易に取り出せるようにする。
【解決手段】 ハンド10は、基部12と、基部12に関連して設けられ、物体を引掛けて持ち上げることができるフック要素14と、基部12に関連して設けられ、フック要素14と協働して物体を挟持する挟持要素16と、フック要素14と挟持要素16とを相対的に移動させる駆動部18とを備えて構成される。フック要素14は、基部12上で挟持要素16に対し接近及び離反する方向へ移動可能に設置される。把持動作に際しては、最初にフック要素14に物体を引掛けて持ち上げ、その物体を、フック要素14上で重力の作用によりハンド10に対し特定の相対位置に自動的に移行させた後に、フック要素14を駆動して挟持要素16に物体を押し付けて挟持する。
(もっと読む)
マイクロチューブ用ピッキング装置
【課題】部品点数を削減し、軽量化を図り、安価であるピッキング装置を提供すること。
【解決手段】チューブラック内にマトリックス状に整列収納された複数のマイクロチューブを1本ずつ摘まみ上げることが可能なマイクロチューブ用ピッキング装置において、複数本の爪121を有し、つかみ径が前記マイクロチューブの外径より小さく、弾性力によって前記マイクロチューブを保持する爪部ユニット120と、前記爪部ユニットを直線ガイド140に沿って昇降運動させる直動装置180と、前記複数本の爪の中央を挿通し、前記爪部ユニットが上昇した状態において前記複数本の爪よりも突出した状態になるワーク押し出しバー160を有することにより、上記課題を解決する。
(もっと読む)
基板洗浄装置
【課題】 基板洗浄装置の工程流れ方向に対するコンパクト化を図りつつ、基板の支持を確実化させると共に、基板のエッジ部分の異物残存を回避し、製品歩留まりを向上させる。
【解決手段】 基板2を移送しつつ、スクラビング洗浄工程、リンス洗浄工程、および乾燥工程を順次実行する基板洗浄装置1において、スクラビング洗浄工程を実行する第一の槽4と、リンス洗浄工程および乾燥工程を実行する第二の槽5とを備える。そして、第二の槽5に、基板2を垂直姿勢に保持してスピンリンス洗浄およびスピン乾燥を行うための単一のスピン部58を配備する。
(もっと読む)
1 - 13 / 13
[ Back to top ]