
Fターム[3C007EV12]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形する当接部 (142) | 流体圧の利用 (26)
Fターム[3C007EV12]に分類される特許
1 - 20 / 26
把持装置およびその制御方法
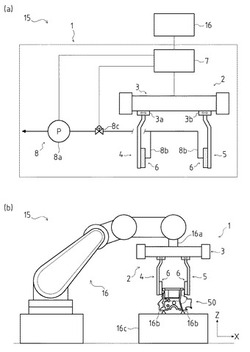
【課題】形状が異なる複数種類のワークを安定的な把持を実現しつつ、従来に比して当接部材の寿命を延ばすことができる把持装置およびその制御方法を提供する。
【解決手段】ワーク50を把持するための把持部2と、把持動作を制御するための制御装置7と、把持部2のワーク50と当接する部位に付設され、ワーク50の形状に倣って変形し、その変形を保持し得る当接部材6と、を備え、把持部2の把持動作によって、当接部材6をワーク50に押圧して該ワーク50の外形形状に倣わせるとともに、該当接部材6の形状を保持して、ワーク50を把持する把持装置1であって、制御装置7は、所定の把持回数ごとに、ワーク50を把持した際の当接部材6のワーク50に対する当接位置を変更する。
(もっと読む)
ロボットハンド装置

【課題】柔軟な対象物を痛めたり、傷つけたりすることなく、把持することが可能なロボットハンド装置の提供。
【解決手段】ハンド先端部に、対象物Mを把持する一対の把持体1と、各保持体1の把持面1aを覆うように固定された柔軟膜により構成される袋体2と、袋体2に充填されたゲル状流体3とを有するロボットハンド装置であり、対象物Mが把持される際に、把持体1と対象物Mとの接触面に対して略一定の面圧が作用し、局所的な接触圧が発生しないため、柔軟な対象物Mを痛めたり、傷つけたりすることなく、把持することが可能となる。
(もっと読む)
つかみ装置
【課題】ワークが不意に離脱するのを規制しつつ、長寿命化および作業の迅速化を図ること。
【解決手段】第1チューブ体2および第2チューブ体3と、各チューブ体2、3の両端がそれぞれ全周にわたって固定され、該チューブ体2、3との間に流体が給排される空間Aが形成された固定部材5と、該固定部材5に連結された弾性変位可能な可動部材6と、を備え、第1チューブ体2は、膨張変形したときに可動部材6を押圧して弾性変位させ、第2チューブ体3は、当該つかみ装置1とワークWとを軸線O方向に沿って相対的に接近移動させることでワークWに内挿または外挿され、可動部材6には、第2チューブ体3がワークWに内挿または外挿されるときに、弾性変位した可動部材6が復元変位することでワークWの被係合部W1に係合し、ワークWに対する第2チューブ体3の内挿または外挿が解除されるのを規制する係合部16が設けられているつかみ装置1を提供する。
(もっと読む)
把持装置
【課題】当接部の挟圧方向に対する厚みをより大きくして、従来に比して把持力を高めた把持装置を提供する。
【解決手段】複数の爪部4・5と、弾性素材からなる袋状部材6aと、該袋状部材6aに充填される粒状物6bとを備え、各爪部4・5のワーク50と当接する部位に付設される複数の当接部6・6・・・と、を有し、各爪部4・5を変位させることにより、各当接部6・6・・・によりワーク50を挟圧し、ワーク50を挟圧した状態で、袋状部材6aの内容積に対する粒状物6bの体積比率を増大させることにより、粒状物6bを、任意の形状を保持しつつ硬化させて、ワーク50の把持を行う把持部2を備える把持装置1であって、把持部2は、当接部6を構成する袋状部材6aのワーク50と当接する部位である正面部6cに連続し、かつ、該正面部6cに略直交して形成される部位である側面部6dの位置を規制するための規制部材9(保持枠9a)を備える。
(もっと読む)
つかみ装置
【課題】ワークをつかんだり有底筒状のワークの内部を密閉したりするチューブ体に、ワークに付着していた異物が付着するのを抑制する。
【解決手段】チューブ体11、12は軸線O方向に沿って複数配設されるとともに、それぞれのチューブ体11、12は硬質基体15との間に互いに独立した密閉空間Aを各別に形成し、給排通路13、14は互いに独立して複数配設されるとともに、それぞれの給排通路13、14は、互いに独立した各密閉空間A内に各別に連通し、複数のチューブ体11、12のうち、軸線O方向の一端に位置する一端チューブ体12には、膨張状態で、当該つかみ装置1およびワークWの軸線O方向の相対的な接近移動に伴い、ワークWの表面に摺接する摺接部材20が配設されている。
(もっと読む)
つかみ装置
【課題】伸縮袋体の寿命を長くできるとともに、伸縮袋体の外周面とワークの内周面との接触面積を十分に確保でき、把持性能に優れたつかみ装置を提供することを目的とする。
【解決手段】両端開放の筒状のチューブ31と、棒状又は筒状のボディ2とを有し、給排空間15内に流体Fを供給してチューブ31を伸長させてチューブ31の周面とワーク23の周面とを接触させることでワーク23をつかむとともに、当該給排空間15内の流体Fを排出してチューブ31の周面とワーク23の周面との接触を解除させることでワーク23を離すつかみ装置1において、チューブ31が、チューブ本体とチューブ本体の外周面37に取付けられた接触面体とにより形成され、接触面体は、流体Fが給排空間15内に供給された場合に外面全体がワーク23の内周面13と面接触する。
(もっと読む)
ロボットハンド及びロボットハンドの制御装置
【課題】単純な構造かつ簡単な制御によって、多種多様な形状の把持対象物を把持可能なロボットハンド及びその制御装置を提供する。
【解決手段】屈曲可能な指部と、低剛性状態と高剛性状態との間で可逆的に制御可能な剛性付与部と、把持対象物に接触可能でかつ膨張可能な当接部とを備える指を複数個、ベース部に配置し、剛性付与部が低剛性状態のとき指部を屈曲させて把持対象物に当接部を接触させ、剛性付与部を高剛性状態に硬化させ、当接部を膨張させ、把持対象物と剛性付与部の間に把持力を発生させて把持対象物の把持を行う。
(もっと読む)
物体把持装置
【課題】円筒形状体を用いていたので、関節駆動用アクチュエータの装着バンドとして用いた場合に、関節に通しづらかった。また、把持力制御は大型システムで高製造コストで行っていた。
【解決手段】平板形状体11は複数の剛体111よりなり、これらの両端をヒンジ結合111aによって接続してあり、従って、湾曲可能になっている。偏平アクチュエータ12においては、偏平チューブ121を複数個並列接続する。さらに、偏平アクチュエータ12においては、帆布よりなる柔軟体122を一定間隔で剛体111に貼り付けてある。剛体111の中点に貼り付けてある。この柔軟体122と剛体111との間の各空隙に1つの偏平チューブ121が挿入されている。非把持状態(非湾曲状態)において、偏平チューブ121に空気を供給すると、把持状態(湾曲状態)において、各偏平チューブ121から半径方向の力frが発生する。
(もっと読む)
把持装置及び搬送装置
【課題】被把持部材が小型であっても、被把持部材を損傷させることなく把持する。
【解決手段】把持パット26は、内部空間48に圧縮空気が供給されると、把持装置22の中央に位置する鉛直方向の軸線52上の点を中心としてダイヤフラム部44が円板状に変形する。ダイヤフラム部44が円板状に変形すると、4つの接触部46によって囲まれる円形の領域は、把持装置22が把持するレンズよりも半径が約0.5mm大きくなる。内部空間48内が大気圧にされると、把持パット26が気圧差による外力を受けなくなり、接触部46それぞれがレンズに側方から接触する。つまり、把持装置22は、接触部46がレンズに接触する圧力でレンズを把持する。
(もっと読む)
つかみ装置
【課題】ゴムスリーブの交換作業を簡単に行うことが可能なつかみ装置1を提供する。
【解決手段】基体60と、基体60の外周側に配置されたゴムスリーブ10とを備え、基体60とゴムスリーブ10との間に形成された密閉室5に空気を供給することによりゴムスリーブ10を弾性変形させてワークを保持するつかみ装置1であって、ゴムスリーブ10の両端部には、ビードワイヤを全周に埋め込んだビード部12,16が形成され、前記基体60には、ビード部12,16の全周に当接する座面22,36が形成されていることを特徴とする。
(もっと読む)
把持装置およびその制御方法
【課題】複雑な装置や大掛りな装置を必要とせずに、把持対象物を安定して把持し、容易に離すことができるマニピュレータを提供する。
【解決手段】マニピュレータに搭載される吸着離脱補助機構は、把持対象物の表面に向かって突出した外周部およびその外周部に囲まれた窪み部34を有して弾性変形可能な吸盤31と、吸盤31の背面35と指部材21の間に配置されて、指部材21と把持対象物とが互いに押し付けられたときに吸盤31の背面35を押す押付け力伝達部32と、吸盤31の外周部と指部材21の間に配置されて、指部材21と把持対象物とが互いに引き離されるときに吸盤31の外周部を指部材21側に引っ張る引張力伝達部材33とを有する。
(もっと読む)
つかみ装置
【課題】エア供給手段を必要とせず、設備を簡素化することができるつかみ装置を提供する。
【解決手段】基体11と、弾性を有する円筒状の弾性スリーブ15と、を備え、基体11と弾性スリーブ15との間に密閉室17が形成されたつかみ装置10において、弾性スリーブ15の一端が、基体11に固着され、弾性スリーブ15の他端が、基体11に対して軸線方向に摺動可能な可動部材13に固着され、密閉室17に流体を供給することなく、可動部材13を移動させて弾性スリーブ15の両端を接近させることにより、弾性スリーブ15を膨張させるように形成されている。
(もっと読む)
つかみ装置
【課題】ゴムスリーブ10の交換作業を簡単に行うことが可能なつかみ装置1を提供する。
【解決手段】密閉室5の壁面の一部を構成するゴムスリーブ10を備え、密閉室5に空気を供給することによりゴムスリーブ10を膨張変形させてワークを保持するつかみ装置1であって、ゴムスリーブ10の下端部12が、ボルト部材20のテーパ面22と中間部材30のテーパ面32とにより着脱自在に挟持され、ゴムスリーブ10の上端部16が、ナット部材40のテーパ面46と中間部材30のテーパ面36とにより着脱自在に挟持されている構成とした。
(もっと読む)
ワーク把持装置
【課題】積層配置された複数のワークを同時にかつ強固に把持できるワーク把持装置を提供すること。
【解決手段】把持装置1は、一列に配置された複数の円筒状のコレット11と、これら複数のコレット11同士の間に配置された複数の円筒状の駒12と、複数のコレット11および駒12に挿通されて、複数のコレット11および駒12を両端側から挟んで加圧する加圧装置20と、を備え、駒12の外径は、中央部では、コレット11の内径よりも大きく、中央部から両端部に向かうに従って小さくなり、両端部では、コレット11の内径よりも小さくなる。
(もっと読む)
チャッキング装置
【課題】チャック機構の簡素化を図ったチャッキング装置を提供する。
【解決手段】ロッド1の外周部に設けられて、円筒体Kを内面側から保持するチャック機構2を備え、チャック機構2は、外周面に環状の凹溝9が設けられた円筒状の本体部3と、凹溝9に密接状態に装着され、凹溝9内に導入される加圧流体により拡張して円筒体Kの内面側に密着するOリング、Xリング、Cリング、Vリングまたは断面方形のリング等の環状の弾性シール部材4を備えている。
(もっと読む)
つかみ装置
【課題】膨張可能なチューブを小さな折り返し幅寸法で折り返しできると共に、膨張可能なチューブの折り返し作業も容易であり、小型化に適したつかみ装置を提供する。
【解決手段】ボディ21の外周面に二カ所で折り返された膨張可能なチューブ22を配置し、膨張可能なチューブ22の両端をボディ21に密封状態でそれぞれ固定し、ボディ21の外周面に膨張可能なチューブ22で覆われる気密スペース8を構成し、気密スペース26に空気を供給することによって膨張可能なチューブ22を膨張させ、膨張させた膨張可能なチューブ22の圧接力によってワークを把持するつかみ装置20であって、膨張可能なチューブ22は、二本の単繊維の糸を縒って、全体としての直径が0.2mm未満の補強コードが埋設されたゴム材にて形成されている。
(もっと読む)
つかみ装置
【課題】膨張可能なチューブを小さな折り返し幅寸法で折り返しできると共に、膨張可能なチューブの折り返し作業も容易であり、小型化に適したつかみ装置を提供する。
【解決手段】ボディ21の外周面に二カ所で折り返された膨張可能なチューブ22を配置し、膨張可能なチューブ22の両端をボディ21に密封状態でそれぞれ固定し、ボディ21の外周面に膨張可能なチューブ22で覆われる気密スペース26を構成し、気密スペース26に空気を供給することによって膨張可能なチューブ22を膨張させ、膨張させた膨張可能なチューブ22の圧接力によってワークを把持するつかみ装置20であって、膨張可能なチューブ22は、単繊維で、且つ、直径0.2mm未満の補強コードが埋設されたゴム材にて形成されている。
(もっと読む)
触覚検出装置と該装置を使用した可動装置
【課題】触覚検出装置と該装置を使用した可動装置の提供。
【解決手段】本発明は一種の触覚検出装置に関わるものである。主に検出層、圧力調節ユニット、圧力センサーユニット及び制御ユニットを備える。該感知層は複数の弾性体より構成する。該圧力調節ユニットはパイプにより該感知層に連結され、該弾性体内部の圧力を制御する。該一つ以上の検出ユニットは該弾性体の圧力変化を検出できる。該制御ユニットは該圧力センサーユニット及び一つ以上の検出ユニットに連結し、該制御ユニットは該圧力センサーユニットより発生した検出信号を受信する。該触覚検出装置を可動装置の表面に覆い、弾性体内部に備える空気袋の圧力変化を検出することにより、外部物体の大きさと位置を検出するほか、気体の供給により弾性体内部に備える空気袋の圧力変化を改変し、柔軟度変化できる。
(もっと読む)
ロボットハンド
【課題】把持又は押圧する物体の表面形状に合わせて追従することで、物体に十分な把持力又は押圧力を付与することを可能とする。
【解決手段】指部10の第1指部11に形成された凹所63の底部に、第1指部11の軸方向に並んで配されたコイルバネ77を介して押え部65を接続する。押え部65が物体200に把持力又は押圧力を付与する場合、押え部65が物体200の形状に追従できるように、指腹部65と第1指部11との間には、隙間を設ける。
(もっと読む)
伸張可能指形捕捉具
【課題】容器の空洞部に挿入し要素が膨らむことにより容器を捕捉する捕捉具であり、長寿命で構成部品交換容易で、かつ大捕捉力を可能とする捕捉具を提供する。
【解決手段】基端と末端の端部を伴う支持体、前記本体中を交互に誘導されるとともに移動する空圧制御ピストン、支持体の末端部において関連してピストンに接続されるとともにこれと一緒に軸方向に移動する圧縮円盤、圧縮円盤と支持体の末端部間に組立てられるとともに、非作動と作動の位置間の圧縮円盤を伴う制御ピストンの運動に応じて収縮および伸張の位置間を移動する柔軟性捕捉具要素により構成される空圧的制御指形捕捉具。
(もっと読む)
1 - 20 / 26
[ Back to top ]