
Fターム[3C007EV14]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形する当接部 (142) | 弾性膜(開空間、閉空間、充填空間あり) (45)
Fターム[3C007EV14]に分類される特許
1 - 20 / 45
形状自在な吸着グリッパとこれによる把持方法
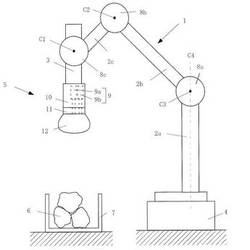
【課題】ワークの形状及び大きさによらずに確実にワークを把持することを可能とする吸着グリッパを提供する。
【解決手段】一端に受圧面11aを有する固定部材11と、受圧面11aに密着して取り付けられ、内部に粒体12bを充填させた可撓性かつ気密性の中空バッグ12aを有する把持部12とを有し、中空バッグ12aは、把持部12を鉛直下向きにした場合において中心部を鉛直方向に貫通した減圧空間17と減圧空間17を取り囲む中空バッグ内部空間とを有し、かつ、ワーク6の固定部材11に対向する面に対して押し付ける押付力によって、その接触部分におけるワークの形状にならうようになっており、さらに、減圧空間17及び中空バッグ内部空間の圧力を所定負圧に減圧しかつ大気圧に戻すことができる減圧装置9を有する。
(もっと読む)
把持装置

【課題】被把持物と接触する接触部を交換する必要が生じたとき、圧力センサ全体を交換することなく、その接触部のみ交換できるようにする。
【解決手段】把持装置は、両側に電極22a,22bが設けられた圧電素子21を電極22a,22bに接続された1対のフレキシブル基板23a,23bで挟み込んで形成された圧電振動型圧力センサ20を、ワークを把持する把持部6の指先部6a及び中節部6bに圧電素子21と1対のフレキシブル基板23a,23bを把持部6の把持力方向に配置して備え、さらに、把持部6に着脱可能に設けられた耐油性、耐薬性の弾性を有するゴム製の保護層24を備えている。被覆部材の劣化、傷、摩耗、ヘタリが生じても、圧電振動型圧力センサ全体を交換する必要がなく、保護層24のみを交換できる。
(もっと読む)
把持装置およびその制御方法
【課題】形状が異なる複数種類のワークを安定的な把持を実現しつつ、従来に比して当接部材の寿命を延ばすことができる把持装置およびその制御方法を提供する。
【解決手段】ワーク50を把持するための把持部2と、把持動作を制御するための制御装置7と、把持部2のワーク50と当接する部位に付設され、ワーク50の形状に倣って変形し、その変形を保持し得る当接部材6と、を備え、把持部2の把持動作によって、当接部材6をワーク50に押圧して該ワーク50の外形形状に倣わせるとともに、該当接部材6の形状を保持して、ワーク50を把持する把持装置1であって、制御装置7は、所定の把持回数ごとに、ワーク50を把持した際の当接部材6のワーク50に対する当接位置を変更する。
(もっと読む)
ロボットハンド装置
【課題】柔軟な対象物を痛めたり、傷つけたりすることなく、把持することが可能なロボットハンド装置の提供。
【解決手段】ハンド先端部に、対象物Mを把持する一対の把持体1と、各保持体1の把持面1aを覆うように固定された柔軟膜により構成される袋体2と、袋体2に充填されたゲル状流体3とを有するロボットハンド装置であり、対象物Mが把持される際に、把持体1と対象物Mとの接触面に対して略一定の面圧が作用し、局所的な接触圧が発生しないため、柔軟な対象物Mを痛めたり、傷つけたりすることなく、把持することが可能となる。
(もっと読む)
つかみ装置
【課題】ワークが不意に離脱するのを規制しつつ、長寿命化および作業の迅速化を図ること。
【解決手段】第1チューブ体2および第2チューブ体3と、各チューブ体2、3の両端がそれぞれ全周にわたって固定され、該チューブ体2、3との間に流体が給排される空間Aが形成された固定部材5と、該固定部材5に連結された弾性変位可能な可動部材6と、を備え、第1チューブ体2は、膨張変形したときに可動部材6を押圧して弾性変位させ、第2チューブ体3は、当該つかみ装置1とワークWとを軸線O方向に沿って相対的に接近移動させることでワークWに内挿または外挿され、可動部材6には、第2チューブ体3がワークWに内挿または外挿されるときに、弾性変位した可動部材6が復元変位することでワークWの被係合部W1に係合し、ワークWに対する第2チューブ体3の内挿または外挿が解除されるのを規制する係合部16が設けられているつかみ装置1を提供する。
(もっと読む)
指ユニット及び把持装置
【課題】形状が複雑なものや破損したり傷付きやすい把持対象物であっても、適切に掴むことが可能な指ユニット及び把持装置を提供する。
【解決手段】把持装置を構成する指ユニットは、ベース部材22の表面に指腹機構部24を設けた構成とされている。指腹機構部24は、把持対象物に対して面接触可能な表層部26と、表層部26に追従して変形可能な中間部材28と、表層部に対して裏面側から押圧可能な支持部材30とを有し、ベース部材22と表層部26との間に中間部材28及び支持部材30が配された構造とされている。指腹機構部24は、把持対象物との接触に伴って表層部26に対して圧力が作用すると、支持部材30を支点として表層部26の姿勢が把持対象物の表面に沿うように変化し、把持対象物側に作用する圧力の局所的上昇が防止される。
(もっと読む)
照明ランプ交換方法及び交換治具
【課題】核燃料セル内の照明装置の維持管理費を低減するために照明ランプの交換を容易に行える交換治具を提供する。
【解決手段】照明ランプ56の交換治具は、マスタスレーブマニピュレータによって把持される把持部82と、照明ランプ56の外周を弾性的に把持することにより保持する弾性把持筒81より構成される。弾性把持筒81は、スリット812を有する弾性を持ったゴム板811を巻き付けて、天板821の端面にネジ止め83で固定する。照明ランプの交換時は、弾性把持筒81を照明ランプ56に挿入して照明ランプの外周を比較的弱い力で弾性的に把持する。
(もっと読む)
クランパ、水室内作業装置およびクランプ方法
【課題】管材を安定的にクランプ保持できるクランパ、水室内作業装置およびクランプ方法を提供すること。
【解決手段】このクランパ23は、管板137に配置された管材132に挿入されて管材132をクランプする。また、クランパ23は、管板137あるいは管材132に当接可能な当接部2311bを有すると共に挿入部2311aを管材132に挿入して管材132をクランプするクランプ機構231と、クランプ機構231を挿入部2311aの挿入方向に昇降させる昇降機構232とを備えている。
(もっと読む)
ロボットアームの制御方法及びプログラム
【課題】作業性の高いロボットアームの制御方法を提供する。
【解決手段】ロボットアームの制御方法は、外表部が柔軟部材600で覆われたロボットハンド(ハンド部120)を備えるロボットアームの制御方法であって、被挟持部材が置かれる載置面に柔軟部材600を押し付け、推定した柔軟部材600のつぶれ量を予め設定されたつぶれ量より大きくする工程と、ロボットハンドで被挟持部材を挟持する工程と、を備える。柔軟部材600を所定のつぶれ量で押し潰して被挟持部材を挟持するので、被挟持部材を確実に挟持でき、作業性を向上させることができる。
(もっと読む)
つかみ装置
【課題】ワークをつかんだり有底筒状のワークの内部を密閉したりするチューブ体に、ワークに付着していた異物が付着するのを抑制する。
【解決手段】チューブ体11、12は軸線O方向に沿って複数配設されるとともに、それぞれのチューブ体11、12は硬質基体15との間に互いに独立した密閉空間Aを各別に形成し、給排通路13、14は互いに独立して複数配設されるとともに、それぞれの給排通路13、14は、互いに独立した各密閉空間A内に各別に連通し、複数のチューブ体11、12のうち、軸線O方向の一端に位置する一端チューブ体12には、膨張状態で、当該つかみ装置1およびワークWの軸線O方向の相対的な接近移動に伴い、ワークWの表面に摺接する摺接部材20が配設されている。
(もっと読む)
把持装置
【課題】真空排気設備を必要としない簡易な構成で、当接部を硬化させることができる把持装置を提供する。
【解決手段】袋部材6a内を減圧させることにより、粒状物12を任意の形状を保持しつつ硬化させる、ワーク20と当接する部位である各当接部6・6・6、を有する把持部2を備え、袋部材6aの内部と外部を連通する連通配管8と、連通配管8が形成する流通経路における流体の流れ方向を袋部材6aの内部から外部へ向かう方向に規制する逆止弁9と、袋部材6aと逆止弁9を連通する連通配管8を分岐して延設した連通配管8が形成する流体の流通経路上に配設する開閉弁10と、を備え、各挟圧部4b・4b・5bによりワーク20を挟持して、各当接部6・6・6をワーク20に押圧することにより、袋部材6a内の空気を、袋部材6aの外部に流出させて、袋部材6a内を減圧する。
(もっと読む)
把持装置
【課題】耐磨耗性および耐切創性に優れ、かつ、良好な把持状態が保持できるとともに、容易に交換ができる当接部を備え、さらに当接部の交換が容易でありながら、当接部が該当接部の付設部に対して変位することを防止できる把持装置を提供する。
【解決手段】ワーク50を挟圧する各挟圧部4b・4b・5bを有する各爪部4・5と、弾性素材からなる内袋11と、該内袋11に充填される粒状物12と、を備え、内袋11内を減圧して、内袋11の内容積に対する粒状物12の体積比率を増大させることにより、粒状物12を任意の形状を保持しつつ硬化させる、各挟圧部4b・4b・5bのワーク50と当接する部位に付設される各当接部6・6・6と、を有する把持部2を備える把持装置1であって、各挟圧部4b・4b・5bの各当接部6・6・6を付設する付設面4g・4g・・・に、凹凸形状を有する各係止部10・10・・・を形成する。
(もっと読む)
形状自在なロボットハンド爪
【課題】ワークの形状によらずに確実にワークを把持することを可能とするロボットハンドを提供すること。
【解決手段】ワーク16を把持するロボットハンド15であって、複数の爪21と、爪21の対向する内側に取り付けられた複数の形状自在パット22と、爪21の間隔を開方向と閉方向の間で開閉するチャック装置23と、を備える形状自在パット22は、ワーク16を把持する把持力によりワーク16の表面形状にならうようになっている。
(もっと読む)
つかみ装置
【課題】追加部材を削減すると共に、第一、第二チューブの個別の膨張、収縮を可能にし、さらに、つかみ装置の軽量化を図ることを目的とする。
【解決手段】第一硬質基体4及び第一チューブ5を有する第一ピッカー2と第二硬質基体6及び第二チューブ7を有する第二ピッカー3とが直列に連結されたつかみ装置1において、第一硬質基体4に、第一柱状部40と第一筒状部41が備えられ、第一筒状部41の内側に第二硬質基体6の端部を嵌装させ、第一柱状部40の中央部に第一肉抜き部42を形成し、第一柱状部40の外周部に第一給排気口10及び第二給排気口11を形成し、第一柱状部40に、第一給排気口10と第一チューブ5の内側とを連通する第一空気通路12、及び、第二給排気口11と第一筒状部41の内側とを連通する第二空気通路13、を形成し、第二硬質基体6に、第一筒状部41の内側と第二チューブ7の内側とを連通する第三空気通路17を形成する。
(もっと読む)
つかみ装置
【課題】リークテストの時間短縮を図ることを目的とする。
【解決手段】弾性体からなるチューブ3の内側に硬質基体2が挿通され、硬質基体2の外周面にチューブ3の両端がそれぞれ全周に亘って固定されてチューブ3の内側が密閉されており、硬質基体2の軸方向一端部26に給排気口20が形成され、硬質基体2に、給排気口20とチューブ3の内側とを連通する第一空気通路21が形成されており、第一空気通路21を通ってチューブ3の内側にエアが流入することでチューブ3が膨張するつかみ装置1において、硬質基体2に、硬質基体2の軸方向一端部26から軸方向他端部25まで延在してチューブ3の軸方向他方側に向けて開口した第二空気通路24が複数形成されている。
(もっと読む)
把持装置、および、この把持装置の形成方法
【課題】円柱状の剛性コアと、その周面に取り付けられて前記剛性コアとの間に気密空間を形成する環状スリーブとを具え、密空間に内圧を加えることにより拡径するよう構成された把持装置の製造において、加締め機を不要なものとすることができ、しかも、工程を簡素化できる把持装置およびその形成方法を提供する。
【解決手段】環状スリーブ2の上側端2bおよび下側端2aは、それぞれの、半径方向外側に配置された剛性リング5、7と、半径方向内側に配置されたゴムリング4、6とによって厚さ方向に締め付けられて固定され、ゴムリング4、6は軸線方向に圧縮された状態で剛性コア1に固定されている。
(もっと読む)
把持装置
【課題】膨張体により対象物を把持する場合に、対象物が、従来においては把持に困難な姿勢や位置をとっていても、対象物を把持できるようにする。
【解決手段】開口1aを持つ対象物を把持する把持装置である。開口1aから対象物1の内部空間1bに挿入され、膨張可能な膨張体3を備える。膨張体3は、内部空間1b内で膨張することで対象物1の内面に接触圧を作用させ、該接触圧により対象物1を把持する。膨張体3には挿入案内部5が取り付けられ、該挿入案内部5は、開口1aへの膨張体3の挿入を案内するように膨張体3から突出している。
(もっと読む)
把持機構
【課題】 多種・多様な把持対象物に対して柔軟になじみ、また把持対象物の把持・操り・運搬などの動作により生じる力やモーメントにも耐えうる把持機構を提供することを目的とする。
【解決手段】 把持機構は、内外連続式袋状構造体1、状態変化部2、状態変化発生部3を有する。内外連続式袋状構造体1は、袋が外側から内側へと連続した構造となっている。状態変化部2は、内外連続式袋状構造体1に内包されている。状態変化発生部3は、上記状態変化部2の状態を変化させるものである。
(もっと読む)
つかみ装置
【課題】チューブの磨耗を容易に判定可能なつかみ装置を提供する。
【解決手段】両端開放の筒状のチューブ10と、棒状又は筒状のボディとを有し、チューブ10の一端開放端部とボディの周面の一端側とが気密状態に連結され、チューブ10の他端開放端部とボディの周面の他端側とが気密状態に連結されることで、ボディの周面とチューブ10との間に給排空間が形成され、当該給排空間内に流体を供給してチューブ10を伸長させてチューブ10の周面とワークの周面とを接触させることでワークをつかむとともに、当該給排空間内の流体を排出してチューブ10の周面とワークの周面との接触を解除させることでワークを離すつかみ装置において、チューブ10が、表面を形成するカバーゴム20と、カバーゴム20の内面に設けられた磨耗判定層とを備え、カバーゴムと磨耗判定層とが色違いに形成された。
(もっと読む)
搬送装置及び真空装置
【課題】高温環境下において搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、駆動源からの動力が伝達される複数のアームを有する伸縮自在なリンク機構20と、リンク機構20の動作先端部において隣接する第3の左アーム3L、第3の右アーム3Rによって連結され基板10を載置するための載置部5とを備える。載置部5には、基板10の側部と当接して係止するための係止部5a、5bが設けられる。リンク機構20の隣接する第3の左アーム3L、第3の右アーム3Rには、基板10の側部と当接し基板10を載置部5の係止部5a、5bに対して付勢する付勢部6aを有する弾性の付勢部材6が固定される。付勢部材6は、第3の左アーム3L、第3の右アーム3Rの相対的な角度関係に応じて載置部5の係止部5a、5bに対する付勢部6aの距離が変化するように構成されている。
(もっと読む)
1 - 20 / 45
[ Back to top ]