
Fターム[3C007EW01]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の目的 (376) | 異径物品挟持 (76)
Fターム[3C007EW01]に分類される特許
1 - 20 / 76
ハンドおよびロボット
【課題】異なる大きさや形状のワークを確実に把持すること。
【解決手段】直線軸に沿って互いに接近する向きあるいは遠ざかる向きにスライドする1組のスライド部と、スライド部のそれぞれに固定され、先端部分に把持爪を有する把持部とを備え、把持部は、上記の直線軸および把持爪の先端を含む平面と直交する向きの回転軸まわりに回転する関節部、たとえば、把持爪の先端向きを変更するように回転する第1の関節部と、第1の関節部の位置を変更するように回転する第2の関節部とを備えるようにハンドおよびロボットを構成する。
(もっと読む)
形状自在な吸着グリッパとこれによる把持方法

【課題】ワークの形状及び大きさによらずに確実にワークを把持することを可能とする吸着グリッパを提供する。
【解決手段】一端に受圧面11aを有する固定部材11と、受圧面11aに密着して取り付けられ、内部に粒体12bを充填させた可撓性かつ気密性の中空バッグ12aを有する把持部12とを有し、中空バッグ12aは、把持部12を鉛直下向きにした場合において中心部を鉛直方向に貫通した減圧空間17と減圧空間17を取り囲む中空バッグ内部空間とを有し、かつ、ワーク6の固定部材11に対向する面に対して押し付ける押付力によって、その接触部分におけるワークの形状にならうようになっており、さらに、減圧空間17及び中空バッグ内部空間の圧力を所定負圧に減圧しかつ大気圧に戻すことができる減圧装置9を有する。
(もっと読む)
ロボットハンド及びロボット装置
【課題】簡素に低コストで異種形状や寸法違いを含む多種の対象物を把持することが可能なロボットハンドを提供する。
【解決手段】第1の指部103と第2の指部104とを含む3以上の指部と、3以上の指部を開閉動作させる駆動部MTRと、第1の指部103と第2の指部104の開閉動作を行う向きを変更する指部移動機構と、を備え、指部移動機構は、ウオームホイール131と、モーターと、ウオーム133と、を備え、第1の指部103にはウオーム133の回転に連動してウオーム133の回転方向とは異なる方向に回転する第1歯車141が設けられ、第2の指部104にはウオーム133の回転に連動して第1歯車141の回転方向とは反対の方向に回転する第2歯車142が設けられており、第1の指部103と第2の指部104とは、モーターが回転することにより互いに近づく方向もしくは遠ざかる方向に回転する。
(もっと読む)
ワーク搬送方法および装置
【課題】姿勢矯正手段を用いる必要なしに、ワークを常に適正に、かつ十分強固に把持して、所期した通りの姿勢で所定の作業ステーションまで、ワークを常に確実に搬送することができるワーク搬送方法を提供する。
【解決手段】中空もしくは中実の軸部3と、軸部3の中間部に設けられたフランジ部4とを具え、基準面1上に載置されるワーク2の、フランジ部4を基準面1と直交する向きに押圧して、該フランジ部4の周面を基準面1上に線もしくは面接触させて、前記軸部3の中心軸線を基準面1に平行にした状態で、開閉駆動される一対のフィンガー12,12により、ワーク2のフランジ部4の周面を把持して、該ワーク2を所定の作業ステーションまで搬送する。
(もっと読む)
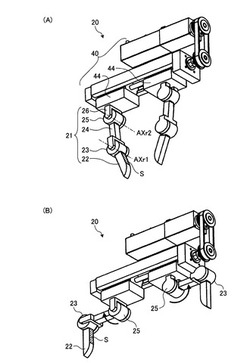
ロボットの駆動装置、ロボットの駆動方法、およびロボット
【課題】多関節の指部を備えたロボットを簡単な制御で駆動する。
【解決手段】対向して設けられた複数本の指部を用いて対象物を把持するに先立って、複
数の関節を備えた指部の形状を、対象物に応じて定められた把持形状に変形しておく。そ
して、指部の形状を把持形状に保持したまま、対向して設けられた複数本の指部を用いて
、対象物を把持する動作を行う。こうすれば、対象物が変更された場合でも、新たな対象
物に応じた把持形状に指部を変形させるだけで、迅速に且つ適切に対象物を把持すること
ができる。しかも把持動作は、グリッパー型のロボットと同様に簡単な制御で実現するこ
とが可能となる。
(もっと読む)
ロボットハンド、およびロボット
【課題】グリッパー型ロボットハンドと同程度に単純な構造でありながら、人間型ロボッ
トハンドのように高い汎用性を有するロボットハンドを提供する。
【解決手段】掌部に3本の指部が取り付けられており、このうちの第2指部と第3指部は
同じ向きに並べて取り付けられ、第1指部はこれらに向き合う向きに取り付けられている
。また、第2指部の取付位置は、第1指部に向き合う状態となる第1取付位置と、第2指
部および第3指部が中心位置で第1指部に向き合う状態となる第2取付位置とに切り換え
可能となっている。このため、小さな対象物は第1指部と第2指部とで把持する動作を行
い、大きな対象物は3つの指部を用いて把持する動作を行う。こうすれば、グリッパー型
のロボットハンドと同程度に単純な構造でありながら、人間型ロボットハンドのように、
様々な対象物を把持することが可能となる。
(もっと読む)
ロボットハンド、およびロボット
【課題】グリッパー型ロボットハンドと同程度に単純な構造でありながら、人間型ロボッ
トハンドのように高い汎用性を有するロボットハンドを提供する。
【解決手段】指部の先端側の腹部の一部を、別部材(指先部材)を用いて構成し、この指
先部材は、指部に収納した状態と、指部から突出した状態とに切り換え可能とする。また
、把持する対象物を検出する圧力センサーは、指先部材に設けておく。こうすれば、大き
な対象物や重い対象物については、指先部材を収納して指部の腹部で把持することで、し
っかりと把持することができる。また、小さな対象物については、指先部材を突出させて
、指先部材で把持する。何れの場合でも圧力センサーは1つでよいので、構造を単純化す
ることができる。
(もっと読む)
把持装置
【課題】真空排気設備を必要としない簡易な構成で、当接部を硬化させることができる把持装置を提供する。
【解決手段】袋部材6a内を減圧させることにより、粒状物12を任意の形状を保持しつつ硬化させる、ワーク20と当接する部位である各当接部6・6・6、を有する把持部2を備え、袋部材6aの内部と外部を連通する連通配管8と、連通配管8が形成する流通経路における流体の流れ方向を袋部材6aの内部から外部へ向かう方向に規制する逆止弁9と、袋部材6aと逆止弁9を連通する連通配管8を分岐して延設した連通配管8が形成する流体の流通経路上に配設する開閉弁10と、を備え、各挟圧部4b・4b・5bによりワーク20を挟持して、各当接部6・6・6をワーク20に押圧することにより、袋部材6a内の空気を、袋部材6aの外部に流出させて、袋部材6a内を減圧する。
(もっと読む)
把持装置
【課題】耐磨耗性および耐切創性に優れ、かつ、良好な把持状態が保持できるとともに、容易に交換ができる当接部を備え、さらに当接部の交換が容易でありながら、当接部が該当接部の付設部に対して変位することを防止できる把持装置を提供する。
【解決手段】ワーク50を挟圧する各挟圧部4b・4b・5bを有する各爪部4・5と、弾性素材からなる内袋11と、該内袋11に充填される粒状物12と、を備え、内袋11内を減圧して、内袋11の内容積に対する粒状物12の体積比率を増大させることにより、粒状物12を任意の形状を保持しつつ硬化させる、各挟圧部4b・4b・5bのワーク50と当接する部位に付設される各当接部6・6・6と、を有する把持部2を備える把持装置1であって、各挟圧部4b・4b・5bの各当接部6・6・6を付設する付設面4g・4g・・・に、凹凸形状を有する各係止部10・10・・・を形成する。
(もっと読む)
ロボットハンド
【課題】把持部の形状が異なる複数種類のワークを別々に把持する場合に、作動を中断することなくかつ部品を交換することなく、ワークの把持部を把持することができ、かつ把持部の形状が大きくことなっても対応でき、使用していない部分がワーク等に干渉するおそれが少ないロボットハンドを提供する。
【解決手段】把持部5aの形状が異なる複数種類のワーク5を別々に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。1対の爪12の少なくとも一方は、長手方向の異なる位置に、複数種類のワークA、B、Cの把持部に、それぞれ対応した形状の複数の凹溝12a、12b、12cを有する。
(もっと読む)
ロボットハンド
【課題】ワークの円筒形部分をその径方向に把持することができ、かつ円筒形部分に作用する把持時の面圧を低く抑えることができ、対応できる円筒形部分の直径の種類が限定されないロボットハンドを提供する。
【解決手段】複数のワークが円筒形部分5aを有し、円筒形部分の直径が所定の範囲内で最小値から最大値まで相違するワークの円筒形部分をその径方向に把持するロボットハンド。1対の爪12と、爪の根元に付属し爪の先端から根元までの直線方向を軸方向としてもつ回転軸と、爪を回転軸の軸心回りに回転駆動する回転駆動装置と、1対の回転軸を開位置と閉位置の間で開閉するチャック装置とを備える。1対の爪12は、閉位置において、互いに対向する位置に回転駆動により所定の範囲の直径を超えて連続的に変化する円弧溝13を周方向に有する。
(もっと読む)
ロボットハンド
【課題】 直径の異なる円筒形部分を有するワークの前記円筒形部分をその径方向に把持する場合に、円筒形部分の直径が大きく異なっても、作動を中断することなくかつ部品を交換することなく、ワークの把持部を安定して把持することができるロボットハンドを提供する。
【解決手段】 直径の異なる円筒形部分5aを有するワーク1の円筒形部分をその径方向に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。爪12は、チャック装置により開閉される開閉部材12aと、開閉部材に爪の長手方向に伸縮可能に取り付けられた先端部材12bと、先端部材を爪の長手方向に伸縮させるアクチュエータ12cとを有しており、開閉部材12aと先端部材12bは、ワーク1の円筒形部分5aに接触してこれを把持する互いに交差する把持面13a,13bをそれぞれ有する。
(もっと読む)
ロボットハンド
【課題】任意の形状を有する対象物体を安定して把持することができるロボットハンド機構を提供することにある。
【解決手段】ロボットハンド機構においては、第1及び第2可動部305A、305Bが直動機構304に移動可能に支持される。第1可動部305Aは、接続機構401を介して指部101Aの受動回転部104及び指部101Cの受動回転部104に結合される。第2可動部305Bは、接続機構401を介して指部101Bの受動回転部104及び指部101Dの受動回転部104に結合される。直動機構が駆動モータ301によって駆動されると、第1及び第2可動部305A、305Bが互いに反対向きに移動される。第1及び第2可動部305A、305Bの直動運動に伴って、接続機構401によって各受動回転部104が回転される。この結果、指部101A、101B、101C、101Dの駆動方向が変更される。
(もっと読む)
万能チャック
【課題】 従来、工場等の製造現場で、品物、ワークの物を、確実、かつ安定的に挾持、搬送できる機具として、万能チャックがある。万能チャックは、大小の物を、挾持、搬送する手段として活用されている。しかし、異形、歪等の如く、特殊な形状の物を、挾持、搬送する手段として、希望する器具がないのが現況である。
【解決手段】 作業機械のアームに取付ける本体に、対で枢支した第一アームと、第一アームを駆動するモータと、第二アームとを駆動するモータと、第三アームを駆動するモータと、垂下杆と、垂下杆の先端に設けた挾持具で構成した万能チャックで、第一〜第三アームを、本体と、第一アーム、第二アームに移動可能に構成し、第一〜第三アームの移動を、本体と、第一アーム、第二アームに設けたモータと、モータの駆動で回転する移動機構とする万能チャックである。
(もっと読む)
ハンド装置
【課題】大きさの異なる複数の所定ワークを把持する際に、ワークの大きさに合わせて把持状態検出センサの位置調整を行う必要がなく、フィンガの開閉時間及び把持力の変動を小さくすることができ、コストの増大及び生産性の低下を抑制することができるハンド装置を提供する点にある。
【解決手段】ワークを把持する把持手段2のオン−オフ式の開閉動作を行ってワークの脱着を行うハンド装置1であって、把持手段2が複数のフィンガ3,3を同期させて開閉するものであり、フィンガ3,3に、被把持部の大きさが異なる複数のワーク又は複数の被把持部の大きさが異なる単一のワークを把持する、複数の把持部C1,C2を設け、把持部C1,C2を、対応する前記被把持部を把持した際におけるフィンガ3,3の開き位置が同じになるように、前記被把持部の所定の大きさに合わせて形成した。
(もっと読む)
ウェーハ搬送ロボット用のハンド、ウェーハ搬送ロボット及びウェーハ搬送装置
【課題】ウェーハの搬送ハンドを小型、軽量化し、さらに1つのハンドで異なるウェーハ口径でも、ウェーハの撓みや位置ずれを生じさせない最適な吸着位置を選択してウェーハを保持し、ウェーハを目的位置に搬送することができるハンドを提供する。
【解決手段】ウェーハを搬送するウェーハ搬送ロボットのアームに取り付けられ、ウェーハを吸着保持するための真空吸着穴が設けられたフォークを備えるウェーハ搬送ロボット用のハンドにおいて、フォークは、フォーク長手方向を回転軸として自転可能に設けられ、上面がウェーハを保持する保持面を構成し、各保持面には少なくとも1つの真空吸着穴が互いに異なる位置に設けられている構成とした。
(もっと読む)
ロボットの関節構造、ロボットフィンガー及びロボットハンド
【課題】リンク部の回転角度を大きくすることなく、大きな物体から小さな物体までを確実に把持することができるロボットの関節構造、その関節構造を備えたロボットフィンガー、及びそのロボットフィンガーを備えたロボットハンドを提供する。
【解決手段】相対的に移動可能に連結された第1リンク部1及び第2リンク部2と、第2リンク部2を第1リンク部1に対して回転させると共に第1リンク部1の長手方向(X方向)に沿って移動させる駆動手段4と、を備えることを特徴とする。
(もっと読む)
チャッキング装置
【課題】異なる形状のワークに対してワンタッチで対応可能なチャッキング装置を提供する。
【解決手段】装置本体上に配設された、第一及び第二のチャック部材を有する第一支持部材並びに第三及び第四のチャック部材を有する第二支持部材と、両支持部材をY軸方向に相互に接近離間させてワークを把持、解除するよう駆動する把持駆動部材と、各チャック部材を第一の位置と第二の位置とに揺動変位させる変位駆動部材とを有し、各チャック部材がワークを把持するフィンガーを有し、第一の位置では第一及び第三のフィンガーと第二及び第四のフィンガーとがX軸方向に離間し、第一及び第二のフィンガーと第三及び第四のフィンガーとがY軸方向に接近し、第二の位置では第一及び第三のフィンガーと第二及び第四のフィンガーとがX軸方向に接近し、第一及び第二のフィンガーと第三及び第四のフィンガーとがY軸方向に離間する。
(もっと読む)
チャック及びロボットハンド
【課題】比較的簡素で、且つ軽量な構造で多様なワークの保持等に対応できるロボットハンド及びチャックの提供すること。
【解決手段】チャックホルダ1、操作ロッド2、及びチャック爪3からなり、チャックホルダ1は、ワークの保持開放機能を満足すべくチャック爪3が揺動自在に収まる切り込み7と、チャック爪3の基部3b背面を支持する揺動支点を備え、操作ロッド2は、その先端部に側方へ突出した加圧部8を備え、チャックホルダ1の中空部に、操作ロッド2を進退可能に挿通し、操作ロッドの加圧部8とチャックホルダ1の揺動支点で、複数のチャック爪3の基部3bを挟持し、各チャック爪3の基部3bの内面に、操作ロッド2の進退に伴う加圧部8の進退量を、各チャック爪3の遠心及び向心方向への揺動量に変換するカム部9を備えるチャック。
(もっと読む)
ハンドおよびマニプレータ装置
【課題】ワークの大きさが変化しても把持力を一定にでき、かつ、小型化を実現できるハンドを提供すること。
【解決手段】ハンド5は、アーム6の先端に設けられて異なる大きさのワークを把持する。このハンド5は、アーム6の先端に固定された固定部20と、この固定部20に接近または離間可能な可動部30と、を備える。固定部20は、所定方向に延出する2本の第1フィンガ22A、22Bを有し、可動部30の他方は、第1フィンガ22A、22Bに略平行に延出する3本の第2フィンガ32A〜32Cを有する。可動部30は、第2フィンガ32A〜32Cが第1フィンガ22A、22Bに対して略平行である状態を維持しつつ、この固定部20に対して接近または離間する。
(もっと読む)
1 - 20 / 76
[ Back to top ]