
Fターム[3C007EW04]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の目的 (376) | 物品の位置が開閉中心からずれた時の挟持 (41) | 挟持部を物品に倣わすもの (15)
Fターム[3C007EW04]に分類される特許
1 - 15 / 15
把持機
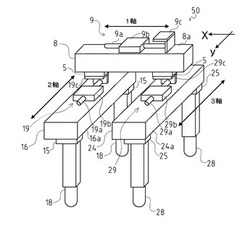
【課題】形状の異なる多品種のワークを把持可能である汎用性の高い把持機を提供することを目的とする。
【解決手段】アクチュエータにより指部を開閉してワークを把持する把持機である汎用ハンド50であって、前記アクチュエータは、当該アクチュエータ自体を前記指部の開閉方向に揺動自在にフローティング支持するフローティング機構を有する。また、3つの前記アクチュエータである電動チャック8、16、24を備え、そのうち2つの電動チャック16、24は、それぞれ一対の指部を有するとともに各一対の指部の開閉方向が平行になるように配置され、残る1つの電動チャック8は、前記2つの電動チャック16、24が有する前記各一対の指部の開閉方向に対して直交する方向に、前記2つの電動チャック16、24を開閉することで、前記2つの電動チャック16、24が有する前記各一対の指部を前記直交する方向に開閉する。
(もっと読む)
治具用ロボットハンドとこれを用いた治具の取付け/取外し方法

【課題】ワークの位置や姿勢にばらつきがある場合でも、ワークと干渉することなく、ワークに治具を正確に取付け/取外しすることができる治具用ロボットハンドとこれを用いた治具の取付け/取外し方法を提供する。
【解決手段】ワーク1に治具8を取付け/取外しする治具用ロボットハンド10。ワーク1又はこれに固定された固定部材5に設けられた嵌合孔7と嵌合する嵌合部分12bを先端部に有し、嵌合部分12bと嵌合孔7との嵌合により、治具の取付け/取外し方向にその軸線が位置決めされる円筒形のガイドロッド12と、搬送ロボット9のハンド取付部9aに取り付けられ、ガイドロッドの末端部12eをガイドロッドの移動及び揺動に追従可能に保持する追従機構14と、治具8を把持/開放可能な把持装置16と、把持装置をガイドロッドの軸線に沿って昇降させる昇降装置18とを備える。
(もっと読む)
物品保持装置
【課題】物品に位置ズレが生じていても、物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置13は、物品2の側面部3,4,5に対して進退可能でそれぞれが異なる側面部3,4,5に引っ掛かるフック体21,41,51を備える。各フック体21,41,51には、対応する側面部3,4,5を検知する検知手段42,52を取り付ける。対応するフック体21,41,51を進退させる駆動手段23を各フック体21,41,51に対応して設ける。物品保持装置13は、検知手段42,52の検知に基づいて駆動手段23を制御して各フック体21,41,51の進出動作を個別に停止させる制御手段61を備える。
(もっと読む)
セラミックス柱状体用移載装置及びセラミックス柱状体の移載方法
【課題】長尺で真直度の悪いセラミックス焼成体をロボットで移載するに際し、応力集中等によるクラックの発生や破損が起こり難い手段を提供すること。
【解決手段】球面及び平面を呈する緩衝材で構成される複数の当接パッド52a,52bをパッド用枠体42a,42bに支持をするとともに弾性機構72a,72bを備える当接パッドシャフト62a,62b、及び、その当接パッドシャフト62a,62bが弾性機構72a,72bによって外部圧力を吸収した状態を保持する状態保持機構82a,82bを備える一対のグリッパユニット22a,22bと、その一対のグリッパユニット22a,22bの間隔を調整する間隔調整機構32と、で構成されるグリッパ12を具備するセラミックス柱状体用移載装置の提供による。
(もっと読む)
ワーク把持ロボット及びワークの把持方法
【課題】ワーク把持ロボットによりワークを把持する際におけるワークの位置決め精度を向上させる。
【解決手段】ロボットハンド1は、ロボットハンド1とワーク50の間の位置決めを行う位置決め部材としての可動ノックピン15と、互いに対向して配置され、ワーク50の把持を行う2つの可動クランプ部材12R及びLを有する。さらに、可動ノックピン15によりワーク50の位置決めがなされた状態で可動クランプ部材12R及びLをワーク50に接近させる際に、可動クランプ部材12R及びLが互いに独立に移動可能である。
(もっと読む)
物品把持装置
【課題】段積みされたコンテナ6の中心O1とハンド4の中心O2との位置がずれている場合でも、簡単に修正して把持できるようにする。
【解決手段】ロボットハンド4に一対のグリッパ12、13を設け、これらグリッパ12、13をそれぞれエアシリンダ14、15によってコンテナ6を把持する位置と開放する位置とに移動可能とし、グリッパ12、13が把持する位置に移動したことを前記エアシリンダ14、15に設けた近接センサ16、17によって検出できるようにする。一対のグリッパ12、13を、コンテナ6を把持する位置に移動させた際に、いずれか一方のシリンダ14または15から検出信号が得られない時には、ロボット2の動作により、ハンド4を信号の得られなかったシリンダ14または15側へ移動させて、両センサ16、17から信号を得られるようにする。
(もっと読む)
チャック装置
【課題】仮載置した部品の傾斜が大きくなっても、部品の傾斜に倣って傾き、部品を確実にチャックすることができるチャック装置を提供する。
【解決手段】チャック本体3に対して、直動駆動手段2の直動中心軸に、案内手段5を介して揺動変位可能に設けてなるチャック部材搭載部6と、このチャック部材搭載部6に搭載したチャック部8,8とにより、前記チャックすべき部品Pをチャックする際に、ワーク接触部9を前記部品Pに予め接触させて、前記部品Pの載置状態を前記チャック部材搭載部6に伝達し、前記チャック部8,8によるチャック位置を補正するようにする。
(もっと読む)
基板搬送装置およびそれを用いた基板搬送方法
【課題】本発明の課題は、基板に反りや歪があっても、その基板にストレスを与えることなくそのままの状態で搬送できる基板搬送装置およびそれを用いた基板搬送方法を提供することである。
【解決手段】本発明の搬送装置1は、それぞれに3個ずつの吸着孔4a〜4c,4d〜4fを有し、ウェーハWを表裏両面から吸着挟持する上下のフォーク2,3と、上下のフォーク2,3を開閉動作させ、ウェーハWを挟み込んだり、開放したりする駆動部13a,13bと、吸着孔4a〜4c,4d〜4fの吸着圧力を一つ一つ個別に検知する圧力センサ6a〜6fと、その検知結果に基づいて、上下のフォーク2,3の開閉動作を制御する制御部11とを備えている。
(もっと読む)
ハンド装置
【課題】前記のような物体の手掌部からの逃げを抑制し、当該物体をより安定に把持することができるハンド装置を提供することを解決課題とする。
【解決手段】本発明のハンド装置1は、手掌部10と、複数の指機構11〜15とを備えている。手掌部10には、その掌面領域100を上に向けたとき、掌面領域100よりも上方に突出した掌突出部101〜103が設けられている。これにより、指機構11〜15の一部または全部の内側から、把持対象となる物体に作用する力に対向する抗力を、突出部101〜103から当該物体に作用させることができる。
(もっと読む)
砲弾把持装置
【課題】形状や大きさが異なる複数種類の砲弾を簡単な制御で確実に把持できる砲弾把持装置の提供。
【解決手段】マニピュレータ5に設けられたベース部6と、ベース部6に砲弾2の両側面に近接離間するようにスライド自在に設けられた一対の把持部ブロック7と、把持部ブロック7に係合し、マニピュレータ5からの操作で駆動されると共に、把持部ブロック7を近接離間移動させる駆動ブロック8と、把持部ブロック7の外側先端に設けられ、砲弾2の軸方向に延びる把持フレーム9と、把持フレーム9に対して直交する軸10回りに回動可能に設けられ、両端に砲弾2側に突出する把持指11を有する把持指ステー12と、把持フレーム9と把持指ステー12間に設けられ、把持指11からの反力を受けて砲弾2の形状に沿ってステーの回動を許容すると共に常時ステーを砲弾2の軸方向と平行なセンター位置に保持するように付勢するセンタリング機構13とを備えた。
(もっと読む)
ロボットハンド
【課題】 形状が異なるワークを確実に把持可能なロボットハンドを提供する。
【解決手段】 ロボットハンド14は、本体40と、一対のフィンガー41、43と、パッド76、91、115、116と、付勢手段を備えている。パッド76、91、115、116は、一端がフィンガー41、43に対して全方向に傾斜可能に取り付けられているとともに他端にワークと接触するための接触面が形成されている。付勢手段は、パッド76、91、115、116をフィンガーに対して所定の姿勢に付勢する。一対のフィンガー41、43は、相互に接近する側に回動することによってパッド76、91、115、116を介してワークを把持し、その把持している状態では、パッド76、91、115、116が付勢手段の付勢力に抗して傾斜することによって接触面がワークに倣う。
(もっと読む)
ロボットハンド
【課題】 簡単な構成で種々の形状のワークに汎用的に対応することができるロボットハンドを実現する。
【解決手段】 ロボットハンド14は、本体40と、本体40に接続されていて本体40に対して回動する下回動部43、44と、本体40に接続されていて本体40に対して回動する内側部と、その内側部に接続されていて内側部に対して回動する外側部46、89を持つ上回動部41、42を1対備えている。下回動部43、44と内側部は、回動して接近することによってワークを把持する。外側部46、89は、下回動部43、44と内側部がワークを把持している状態で、回動して下回動部43、44に接近することによって、下回動部43、44との間で前記ワークを把持する。
(もっと読む)
ワーク保持装置
【課題】複数のワークの種類に対応してワークを適切に保持することができるワーク保持装置を提供することにある。
【解決手段】ワーク保持装置11は、相対的に接近方向及び離間方向に移動可能な一対のベース部25、36と、一対のベース部25、36に各々設けられ、ワークWを間に介して互いに対向するクランプ面23a、23b、33a、33bを有した一対のクランパ23、33と、各ベース部25、36と該ベース部に対応するクランパ23、33との間に各々介在されて、クランパ23、33のクランプ面23a、23b、33a、33bと同一平面H1、H2上にクランパ23、33の回転中心軸線C1、C2が延在し、その回転中心軸線C1、C2を中心としてクランパ23、33をベース部25、26に回動自在に支持するガイド部41、51とを有する。
(もっと読む)
ワークチャック装置及び方法
【課題】 ワークを把持して搬送する際にワークに損傷を与えることを防止できるワークチャック装置及びその方法を提供する。
【解決手段】 本発明のワークチャック装置は、ワークを狭持する把持部と、該把持部を、ワークを狭持する位置及び前記ワークを解放する位置に移動させるアクチュエータと、を備え、アクチュエータが固定され、ワークを把持した状態で、把持部が所定の直線の方向に変位することを許容する第1の変位許容部と、直線を含む二次元平面を想定した場合に、該二次元平面に平行で且つ直線に対して垂直の方向に把持部が変位することを許容する第2の変位許容部とが設けられている。
(もっと読む)
基板移送装置
【課題】基板を安定して移送することができ、基板の収納状態も感知することができる 基板移送装置を提供すること。
【解決手段】基板移送装置はハンド130a、130bがピックアップ位置から溝の位置に戻った時、ハンド130a、130bのポケット部132に配置された基板Wを把持する把持部材140を含む。この把持部材140は基板Wのエッジと面接触する湾曲部144aを有し、そして少なくとも一つのハンド130a、130bの移動方向と同一の方向に移動可能に前記ベース上に設けられるプッシャー144及びプッシャー144が基板Wのエッジを側方に押すように弾性力を加える弾性体146を含み得る。
(もっと読む)
1 - 15 / 15
[ Back to top ]