
Fターム[3C007FT08]の内容
マニピュレータ、ロボット (46,145) | 吸着部の構造 (500) | 当接部 (396) | 当接部に弾性部材を取り付けるもの(吸着カップを除く) (58) | 構造 (35)
Fターム[3C007FT08]に分類される特許
1 - 20 / 35
形状自在な吸着グリッパとこれによる把持方法
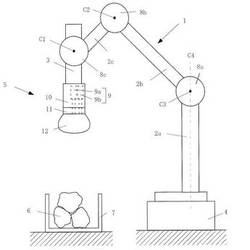
【課題】ワークの形状及び大きさによらずに確実にワークを把持することを可能とする吸着グリッパを提供する。
【解決手段】一端に受圧面11aを有する固定部材11と、受圧面11aに密着して取り付けられ、内部に粒体12bを充填させた可撓性かつ気密性の中空バッグ12aを有する把持部12とを有し、中空バッグ12aは、把持部12を鉛直下向きにした場合において中心部を鉛直方向に貫通した減圧空間17と減圧空間17を取り囲む中空バッグ内部空間とを有し、かつ、ワーク6の固定部材11に対向する面に対して押し付ける押付力によって、その接触部分におけるワークの形状にならうようになっており、さらに、減圧空間17及び中空バッグ内部空間の圧力を所定負圧に減圧しかつ大気圧に戻すことができる減圧装置9を有する。
(もっと読む)
真空吸着パッド

【課題】
凹凸面で凹凸切替わり部に鋭角な落ち込みある場合には、低硬度弾性体のシール材によっても隙間を塞ぎ真空漏れを防ぐことは困難との課題があった。
【解決手段】
真空吸着パッドにおいて、真空室を形成する周縁部の真空シール壁を内シール壁と、内シール壁に外接して外シール壁を設け、二重シール壁の二重構造で形成した。
また、内シール壁と外シール壁の間に液体を連続的に供給する構造を設け、液体シール壁を形成する機能を設けた。
(もっと読む)
ノンコンタクト搬送パッド
【課題】強力に吸着できると同時に、騒音の低減を図ったノンコンタクト搬送パッドを提供する。
【解決手段】圧縮気体を噴出して板状部品を吸着保持する搬送パッドであって、上記搬送パッドの中心部に設けた導入口2からほぼ垂直に流路4を設け、流路の上記搬送パッド中央部分から底面にかけほぼ円錐状の内周凹面を設け、上記内周凹面に対抗してほぼ円錐状のスタッド8を配置して流路を形成し、上記搬送パッドの底面が外周部の方にかけて滑らかな平面状に構成され、圧縮気体が、上記導入口から流路を通り、上記スタッドの先端部分から噴出口6にかけて流路の断面積が小さくなるように狭め、流路を経て上記噴出口から噴出させ、上記噴出口から上記底面に沿って導出することにより板状部品を吸着保持するノンコンタクト搬送パッドにおいて、上記搬送パッドの底面外周部の端面が全周にわたってテーパー状に切欠かれたディフューザ14を設けた。
(もっと読む)
支持装置及び支持方法
【課題】凸部が設けられた半導体ウエハ等の板状部材を支持して搬送する際に、当該支持の安定化を図ることができ、凸部に接触する接触面を当該凸部から簡単に切り離すことができるようにすること。
【解決手段】凸部W1が設けられた半導体ウエハWの支持装置12であり、当該装置は、凸部W1の先端に接触可能な接触体26と、半導体ウエハWに吸引力を付与する吸引手段30とを含む。接触体26は、接触面26A側に貫通する吸引口40を備えた自粘性を有する材料によって構成されている。接触体26を無負荷状態で断面視したときに、接触面26Aは、吸引口40に向かって先細となる形状をなす。接触面26Aは、半導体ウエハWを支持したときに、凸部W1の先端面形状に合わせて変形可能に設けられる。
(もっと読む)
吸着装置および搬送装置
【課題】弾性材料からなる吸着パッドにおける吸引口の位置精度を高め得る吸着装置および搬送装置を提供する。
【解決手段】吸着装置20には、金属製のホルダ30と、炭素を含む導電性のゴム等の弾性材料からなる4つの吸着パッド40a〜40dと、各吸着パッド40a〜40dを対応する吸引部33a〜33dに対して押圧した状態でホルダ30に固定される金属製の固定治具50とが設けられており、この固定治具50には、各吸着パッド40a〜40dの吸引口44が露出する開口が形成されている。
(もっと読む)
半導体製造装置及び半導体装置の搬送方法
【課題】半導体装置の静電破壊の低減化を図る。
【解決手段】吸着パッド12における支持部12cの肉厚が吸着部12aの肉厚より薄く、かつ支持部12cが屈曲可能に形成されていることにより、吸着パッド12によってIC13を真空吸着した際に、支持部12cが屈曲することで、IC13と接触する吸着部12aの滑りを抑えてIC13の表面と吸着部12aとの間で起こる摩擦を低減することができ、IC13の表面での帯電を少なくすることができる。その結果、IC13の静電気放電による破壊を低減できる。
(もっと読む)
吸着装置
【課題】多孔質体の塑性変形を抑制することのできる吸着装置を提供する。
【解決手段】吸着装置1は、吸着面2aに接着層を介して貼着された、樹脂からなる多孔質体3と、吸着面2aよりも当該吸着面2aが面する方向に突出するストッパー4と、を備えている。ストッパー4の吸着面2aからの高さは、接着層および多孔質体3で規定される厚さと対象物5の厚さの合計以下、接着層および多孔質体3で規定される厚さの70%以上である。この構成によれば、多孔質体3の変形がストッパー4によって規制されるため、多孔質体3にかかる圧力を小さくすることができる。
(もっと読む)
形状自在な吸着パッド
【課題】吸盤を用いてワークを把持する吸着パッドを用いて把持を行う際に、吸着力の不足により把持が不完全な状態になることや把持ができても移動する際に落下することを防止する。
【解決手段】ワークを把持する吸着パットであって、ワークの一方向に位置する固定部材11と、固定部材11のワークに対向する面に密着して取り付けられた中央に減圧空間17を有する形状自在パッド12と、減圧空間17内の圧力を所定負圧に減圧しかつ大気圧に戻すことができる減圧装置と、を備える。さらに、形状自在パッド12は、ワークの固定部材11に対向する面に対して押し付ける押付力によりワークの表面形状をならうようになっている。
(もっと読む)
凹凸著しい面にも吸着する真空吸着パッドと真空開閉弁
【課題】凹凸著しい面で汎用的に簡単に利用できる真空吸着パッドを提供すること。
【解決手段】開閉弁筒体の内側に密着され略中央に真空連通孔を穿設した薄膜構造の弁膜と、前記筒体の開口部に断面凹状の弾性体の筒体が密着され、該弾性体筒体内側底面には前記薄膜の真空連通孔に当接する弾性体台状平滑突部の弁座を設け、また前記弾性筒体の伸張により底部を移動させるための可動板と、前記弾性体筒体内側と真空生成装置とを連通する継ぎ手とが弾性筒体の底面部に設けられ形成された伸縮真空制御室と、前記可動板を弾性体筒体長手方向に、前記弁膜とは逆方向に動かすために可動板に接し設けられた接面検知作動杆とからなり、真空吸着パッドが対象物を吸着する場合の3つの状態遷移に対応した真空開閉弁付き真空吸着パッドとした。
(もっと読む)
基板吸着装置
【課題】Wet処理装置(洗浄装置あるいは現像装置等液体を用いるプロセス処理機)内の基板搬送にも適用可能で、配管系の不要なコンパクトな基板吸着装置の提供を目的とした。
【解決手段】少なくとも、基板を気密に吸着するためのラッパ状の吸着口を備えるゴムパッド8と、前記ゴムパッドの基部を膜保持ハウジング30を介して気密に被覆するダイアフラム膜7と、前記ダイアフラム膜7を変形させるための圧力制御ブロック3と、を有することを特徴とする基板吸着装置である。
(もっと読む)
真空吸着パッド
【課題】板状のワークを搬送する際に、その吸着面に凹凸があった場合でも、その凹凸を吸収し、かつワークの湾曲または偏角にも対応して吸着することのできる真空パッドを提供する。
【解決手段】蛇腹状のスカート部2の一端部2cに、このスカート部2内を真空にする真空装置からのパイプ9が接続された基部1が気密的に設けられ、蛇腹状のスカート部2内の大径部2aに、少なくとも一つ以上の貫通穴3bが形成された円板状の固定板3が設けられ、蛇腹状のスカート部2の大径部2aからなる他端部2dに、他端部2dと当接するとともに、少なくとも一つ以上の貫通穴4cが形成された軟質ゴムよりなる円板状のエッジホルダ4が設けられ、エッジホルダ4と固定板3とが一体的に形成されるとともに、エッジホルダ4の外装面4aには、エッジホルダ4よりも軟らかい軟質ゴムより形成されて平面上のワークの板面に当接する環状のエッジ部5が気密的に設けられている。
(もっと読む)
ロボットハンド
【課題】ワークの横ズレや傾きによる位置ズレの発生がなく、確実にワークを保持、固定でき、また多種多様な形状、大きさのワークに対応でき、さらにワークの保持位置の自由度が高く、汎用性に優れたロボットハンドを提供する
【解決手段】ロボットアームの先端に取り付けられ、ワーク6を保持するためのロボットハンド1であって、ワーク面の形状に追従可能なベローズ式吸着パッド2と、ベローズ式吸着パッドの内側に配置され、ベローズ式吸着パッドとともにワークを保持、固定するための高硬度吸着パッド3と、ベローズ式吸着パッドの外側に配置され、ワークの傾きを固定するための固定ロッド4とからなる。固定ロッドはシャフト4aとシャフトの先端に取り付けられたワーク押さえ部4bとからなり、固定ロッドの先端に位置決めピン7が取り付けられていてもよい。
(もっと読む)
バキューム式吸着装置およびロボットハンド
【課題】相手側部材の傾斜した部位を吸着しなければならない場合であっても、バキュームカップのめくれ現象による吸着ミスを防止する。
【解決手段】シリンダチューブ8と、ピストン9と、負圧通路13が形成されたピストンロッド10と、バキュームカップ11のほか、シリンダチューブ8の内周の連通路14を備えている。ピストン9が連通路14に合致していない(A)の状態で負圧通路13を通して負圧を導入する。これによりピストン9側を固定側としてシリンダチューブ8とともにバキュームカップ11をストロークSだけストロークさせて、(B)のようにワークWに押し付ける。そして、ピストン9が連通路14に合致することで負圧吸引力でワークを吸着支持する。
(もっと読む)
シート材吸着装置
【課題】吸着パッドによって吸着したシート材の変形や歪みにより、2枚目以降のシート材まで同時に吸着してしまったり、シート材が破損してしまったりすることがある。
【解決手段】吸着パッド10は、パッド基部11と、外側に円錐状に拡がったパッド先端部12とからなり、吸着パッド10の中央内部には吸着口16へ向かって突出する分離ロッド13を設ける。そして、吸着パッド10がシート材40を吸着する場合は、真空ポンプ機構から通気孔15を介して空気の吸引を行う。
(もっと読む)
配線基板の非接触搬送装置及び方法
【課題】高速搬送であっても、姿勢を安定させた状態で配線基板を搬送することができる配線基板の非接触搬送装置を提供すること。
【解決手段】本発明の非接触搬送装置は吸引部20を備える。吸引部20は、吸引面21に凹部73が設けられるとともに、凹部73の内周面にて開口するエア吹出穴81が設けられる。非接触搬送装置は、エア吹出穴81から凹部73の内周面に沿って噴出したエアにより発生する負圧によって、配線基板110の基板主面120を吸引面21に吸引保持して搬送する。また、吸引部20には、真空引きするための真空吸着穴45が、凹部73の外側領域にて開口するように配設される。
(もっと読む)
エンドエフェクタ及びそれを備えた搬送装置
【課題】1個のエンドエフェクタにおいて、ウェハを2枚搬送することができるようにする。
【解決手段】ウェハを把持する把持機構を備えたエンドエフェクタ3において、エンドエフェクタ3の上面に把持機構を備え、上面の裏面にも把持機構を備え、エンドエフェクタの上面及び裏面の両方でウェハを把持可能に構成する。
(もっと読む)
チャック及び時計の製造方法
【課題】 様々な表面形状のワークを確実に保持することができ、一台で表面形状の異なる複数のワークに対応することができるチャックを提供すること、及び、チャックの台数を削減してコストダウンを図るとともに、調整時間を短縮して生産性の向上を図ることができる時計の製造方法を提供することを目的としている。
【解決手段】 通気性を有する吸着部4の先端面4aをワークXに当接させるとともに吸着部4の基端側からエア吸引することで、吸着部4の先端面4aにワークXを吸着させ、ワークXを保持するチャック1において、少なくとも吸着部4の先端面4aが、弾性変形可能である。
(もっと読む)
半導体装置の製造方法
【課題】支持部材上に剥離可能に設けられた厚みの薄い半導体チップを損傷させずに吸着して持ち上げる。
【解決手段】吸着手段20を、ホルダー部21と、ポーラス部22と、コレット部23とから構成し、ホルダー部21に設けたポーラス部22に、コレット部23を設けるようにする。かかるコレット部23に吸着孔24を設けて、吸着孔24で吸着する。コレット部23を設けるに際しては、脱着自在に設けることで、コレット部23のみを交換して半導体チップ11の種々の形状、大きさに合わせることができる。特に、吸着孔の設定に際しては、半導体チップの吸着度を変化させた対応も可能である。
(もっと読む)
ベルヌーイ・グリッパからなるグリッパ
本発明は、積み込みの難しいシリコンベースのウエハ(2)のような二次元的な部品を非接触で保持するベルヌーイ・グリッパ(1)からなるグリッパであって、制御可能なロボットアーム(3)に接続されたクランプ・リング(4)と、ラッパ状部品(5)によってクランプ・リング(4)に接続され且つラッパ状部品(5)とバッフル・プレート(6)を通る流系(8)とつながるグリップ・フェイス(7)を有し、ベルヌーイ・グリッパ(1)に対して過剰圧力がかかると、グリップされるウエハ(2)を吸着させるために、バッフル・プレート(6)のグリップ・フェイス(7)に負圧が生じるバッフル・プレート(6)と、グリップ・フェイス(7)で一体化され且つグリップ・フェイス(7)に吸着されたウエハ(2)を滑らないようにする支持リング(10)のゴム引きされた支持面(9)と、グリップ・フェイス(7)に吸着されたウエハ(2)を検知するセンサ(11)とを備えるグリッパにに関するものである。グリッパのグリップ・フェイスにグリップされるウエハの極めて衝撃かからないアタッチメントを可能にするために、本発明は、グリッパ(1)に周方向に合わされたダンピング・デバイス(12)を更に備え、ダンピング・デバイス(12)の輪郭が、グリッパ(1)を平面方向から見た場合に、周方向にグリッパ(1)の輪郭を越えて突出し、ダンピング・デバイス(12)が、グリップ・フェイス(7)に向かってウエハを近付ける吸引の間、ウエハ(2)が支持リング(10)のゴム引きされた支持面(9)に対して衝撃のかからない方法で支持されるように、グリップされるウエハ(2)のためにダンピング抵抗を形成する。 (もっと読む)
基板ハンドリング装置、基板搭載方法、基板取出方法
【課題】基板搬送装置への基板の搭載および取り外しを自動化することのできる基板ハンドリング装置、基板搭載方法、基板取り出し方法を提供する。
【解決手段】ロボットアームの先端に取り付けられる基板ハンドリング装置であって、ロボットアームに取り付けられた板状保持部材と、板状保持部材に基板保持方向に突出可能に軸支され、先端に基板吸着パッド部15を備えた基板保持アーム16と、基板保持アーム16を板状保持部材から突出しない状態で固定するロック機構と、基板吸着パッド部15を基板保持アーム16から突出する方向に付勢する突出機構18と、基板吸着パッド部15の基板保持アーム16からの突出を制限する吸着パッド部24とを備えた。
(もっと読む)
1 - 20 / 35
[ Back to top ]