
Fターム[3C007GS15]の内容
マニピュレータ、ロボット (46,145) | 把持装置交換 (231) | ハンド貯蔵 (31)
Fターム[3C007GS15]の下位に属するFターム
移動手段(コンベア等)を有するもの (1)
把持装置抜取り又は接合設備を有するもの (12)
Fターム[3C007GS15]に分類される特許
1 - 18 / 18
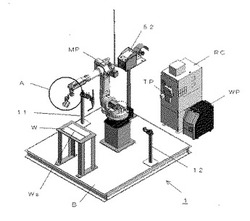
自動溶接システムにおける溶接方法および自動溶接システム
【課題】レーザセンサを溶接トーチの近傍に取り付けている為に定期的な保守作業が必要になり、生産性を低下させる。
【解決手段】レーザセンサLSで溶接部位Wsを検出して教示データを補正し、溶接トーチTにより加工する自動溶接システム1である。溶接ロボットMPは溶接トーチ又はレーザセンサのどちらかを取り付けるためのツール着脱機構を有する。溶接トーチを待避させるためのツールスタンド11およびレーザセンサを待避させるためのツールスタンド12を備える。まず、溶接トーチをツールスタンド11に待避させ、レーザセンサを取り付ける。次にレーザセンサを取付けた状態のときに作成した教示データを補正する。次にレーザセンサをツールスタンド12に待避させ、溶接トーチを取付ける。補正後の教示データを再生することにより溶接加工を行う。輻射熱やヒュームからレーザセンサを保護することができる。
(もっと読む)
マニピュレータのツール保持具

【課題】チャックを垂直状態で保持する際に、マニピュレータ自体や周辺機械の振動、作業者の接触等によりツールが離脱したり、ツールを一定の姿勢で長期にわたって安定的に保持する。マニピュレータに対してツールを正確に位置出しした状態で装着してツール自動交換を可能にする。
【解決手段】起立面に水平方向へ軸線を有して突出するセンター軸及び該センター軸から離間した位置にて水平方向に軸線を有して突出する位置決め軸を設けた固定側保持部材と、ツールに固定され、上記センター軸及び位置決め軸を軸支する軸支孔をそれぞれ有した可動側保持部材とからなると共に固定側保持部材における可動側保持部材の相対面に磁気吸着部材を設ける。
(もっと読む)
加工システム及び加工方法
【課題】ツールの交換の際の通信時間及びロボットの移動時間を短縮すること。
【解決手段】締め付け機25が取り付けられたロボット22は、ツール101,102を取り付ける取り付け部91,92を有している。ロボット23の腕部には、交換用のツール411,412を収納する収納部材401が設けられている。ロボット制御装置は、ロボット22,23の各々の動作を制御することによって、ツール101,102が取り付け部91,92に取り付けられ、ツール411,412が収納部材401に収納されている第1の状態から、ツール101,102が収納部材401に収納され、ツール411,412が取り付け部91,92に取り付けられている第2の状態に遷移させる。
(もっと読む)
カメラ脱着ロボット装置
【課題】ワークが容器の隅に存在する場合であっても、容器の壁と干渉することなくワークを取出すことができるロボット装置を提供する。
【解決手段】ワーク16を認識して把持するロボット装置11。ワーク16を認識する画像認識装置21と、ワーク16を把持するロボットハンド15を有する動作機構19と、ロボットハンド15がワーク16を把持するように動作機構19を制御する制御装置20を備える。画像認識装置21は動作機構19に対して着脱可能となっている。
(もっと読む)
双腕ロボット
【課題】ロボットハンドの交換時間を短縮するとともに、専用の動力源を引くことなしに、また、ハンドの誤着を検出することができる双腕ロボットを提供する。
【解決手段】着脱可能なハンド105を備えたロボット100において、先端に多指ハンド104が取り付けられた多自由度の第1のアーム101と、前記着脱可能なハンド105を先端に取り付けた多自由度の第2のアーム102とを備えた双腕ロボット100において、前記多指ハンド104で前記第2のアーム102に取り付けたハンド105を交換する。
(もっと読む)
ロボット加工機および加工システム
【課題】一のロボット加工機で穴加工と搬送の両方を行えるようにする。
【解決手段】複数の関節からなるロボットアーム12を備え、穴加工を行うロボット加工機10であって、ワークの搬送を行うハンドユニット16と、主軸18aによって穴加工を行う加工ユニット18と、ハンドユニット16と加工ユニット18とを交換して保持するユニット交換機構14と、ユニット交換機構14によってハンドユニット16から加工ユニット18に交換し、穴加工を行うように制御する制御装置Cとを有する。ロボットアーム12は可搬重量が制限されているが、ユニット交換機構14によってユニットを交換できるので、非同時であるものの穴加工と搬送の両方を行える。
(もっと読む)
小型生産設備
【課題】作業対象に対してその位置や姿勢を正確に認識して作業を行う。
【解決手段】ワークWの把持等の作業を行う小型生産設備1は、ワークWを所定の状態に保持するステージ3と、ワークWの把持等を行う第1マニピュレータ4と、第1マニピュレータ4に取付けられた第1エンドエフェクタ6と、第1エンドエフェクタ6に取付けられた第1カメラ7と、第1カメラ7の画像に基づいてワークWの姿勢等を認識する認識手段と、認識結果に基づいてワークWの姿勢等を制御する制御手段とを備え、第1カメラ7は、把持されたワークWの幅方向の端部を撮像視野に含み、かつ幅方向の端部及びワークW前方の所定の範囲を被写界深度に含むように設定されており、認識手段は、第1カメラ7が取得した画像に基づいて、ワークW及び作業対象ワークの姿勢等を認識し、制御手段は、認識結果に基づいてワークWの調整量を決定する。
(もっと読む)
組立装置
【課題】設置面積を縮小し、小型化した組立装置を提供すること。
【解決手段】鏡枠7を支持するステージ3と、鏡枠7に取り付けるレンズ6が配置されたトレイ11と、ステージ3を取り囲んで設けられた側壁21,22,23,24、及び天井壁25と、側壁23に設けられ組立作業に用いる工具が収容された工具棚30と、側壁21に設けられ鏡枠7、レンズ6、及び工具を把持し組立作業を行うマニピュレータ1,2と、を有することを特徴とする組立装置100とした。
(もっと読む)
ロボットシステム
【課題】本発明は、複数台のロボットを接近配置でき、生産に寄与しない無駄な動作時間を最小にするロボットシステムを提供する。
【解決手段】基部に支持された旋回部C1、該旋回部C1に接続した下腕部C2、肘部C3、上腕部C4、手首部C5〜C7を備えた7関節ロボット3と、電極研削装置2とを備えたスポット溶接を行うロボットシステムにおいて、前記電極研削装置2が前記旋回部C1に備えられたものである。
(もっと読む)
ノズル
【課題】実装ヘッドに装着することなく識別が可能なノズルを提供する。
【解決手段】実装ヘッド7に対して装着および離脱可能なノズル3であって、実装ヘッド7に取り付けられる取付部3aと、部品を吸着して保持する吸着部3bと、取付部3aと吸着部3bの間に設けられて吸着部3b側に反射面が設けられたフランジ部3cを備え、フランジ部3cの取付部3a側に、光によって識別される二次元コード30、32を刻印加工するとともに二次元コード30、32を囲繞する領域を平滑加工した。
(もっと読む)
部品移載装置及び表面実装機
【課題】移載精度を高めた表面実装機を提供する。
【解決手段】本発明の部品移載装置である表面実装機10は吸着ノズル70の嵌合軸部71とノズルホルダ80の嵌合孔81とが嵌合可能に設けられ、嵌合軸部71に設けた受け溝75の上側となる受け面76と、ノズルホルダ80に設けた切欠部86の下側となるストッパ面88と、受け面76及びストッパ面88に当接するホルダーピン100と、ホルダーピン100をノズルホルダ80の外側から内側方向に向けて押圧してホルダーピン100を受け面76及びストッパ面88に押し当てることにより嵌合軸部71の突当面77が規制部83Aに当接する方向に付勢する保持バネ110とを備えている。これにより、吸着ノズル70の固定位置精度を高めガタ付きを無くすことで、移載精度を高めることができる。
(もっと読む)
ワークハンド装置およびワークハンド装置の段取りに使用する段取り台、その段取り方法ならびにワークハンド装置を使用したワーク搬送方法
【課題】特定ワークの専用品とせず、汎用性の高いワークハンド装置を提供する。
【解決手段】ロボット20のアーム21の先端に接続され、アーム21の旋回、伸縮によ
ってワークWを搬送するワークハンド装置1″であり、フレーム2にワークWを位置決めする基準ピン3a,4a,5aと、この基準ピンに内蔵され、ワークWを把持するクランパー3b,4b,5bと、それぞれの基準ピンとクランパー3b,4b,5bを有するそれぞれの第1、第2、第3ピンクランパーユニット3,4,5とを備え、第1ピンクランパーユニット3をX軸方向の位置を固定する第1固定手段9と、第2、第3ピンクランパーユニット4,5をY軸方向へ移動する第2駆動手段7と、第2、第3ピンクランパーユニット4,5をZ軸方向の位置を固定する第2、3固定手段11,12と、Z軸の先端方向へ付勢する第2、3付勢手段11c,12cとを備えたワークハンド装置1″である。
(もっと読む)
自動工具交換装置の落下防止システム
【課題】システムの応答速度の低下による、不動作時間がほとんど発生しない自動工具交換装置の落下防止システムを提供すること。
【手段】第1ユニット1に具備させたシリンダー10の切離ポート10a又は接続ポート10bへの空気の供給により第1ユニット側の係止具11を移動せしめ、第1ユニット1に対して第2ユニット2を切離・接続することにより他の第2ユニットに交換する形式の自動工具交換装置において、外部電力3よりソレノイドバルブ6の切換えを行う態様で、切離ポート10a又は接続ポート10bへの空気の供給が可能となるようにしてある
(もっと読む)
成型方法及び成型装置
【課題】成形機に対して交換可能に構成される開閉可能な成形型から、その型開き状態において成形品が取り出される際に、成形品を取り外すため、成形型ごとに専用の取外し具が用いられる構成において、共通の成形機に用いられる成形型が多種類であっても、取外し具の交換や保管のためのスペースが不要で省スペース化が図れ、取外し具の交換作業について自動無人化を図る。
【解決手段】開閉可能な成形型2と成形型2を着脱可能に支持する成形機3とを備え、成形型2にて成形した成形品を成形型2から取り出す際に、成形品を取り外すためのアタッチメント20(取外し手段)を用いる成形装置1であって、アタッチメント20の着脱動作及び所定の移動動作並びにアタッチメント20の操作を自動的に行うロボット35(取出し手段)と、成形型2に設けられアタッチメント20を載置支持するATスタンド40(支持手段)とを備える構成とした。
(もっと読む)
ロボットハンドとロボットハンドのフィンガー交換装置
【課題】予めモジュール化してあるフィンガーユニットを積極的に脱着交換することで多種多様な部品の把持に対応できるようにした汎用性の高いロボットハンドを提供する。
【解決手段】予めモジュール化してある同種または異種の複数のフィンガーユニット3,4を共通のコモンベース2に着脱可能に装着する。フィンガーユニット3は二指把持タイプのものであって、対向配置した二つのフィンガー5または6を一つのモジュールとしてユニット化したものとし、例えば対向配置した二つのフィンガー5がそれぞれに単一または複数の関節10,11を有した関節型のものや、対向配置した二つのフィンガー6が互いに接近離間可能な直動型のものとする。
(もっと読む)
電子部品保持装置,電子部品装着システムおよび電子部品装着方法
【課題】吸着ノズルを保持するノズルヘッドのヘッド保持部材に対する着脱が容易な電子部品保持装置,電子部品装着システム,電子部品装着方法を提供する。
【解決手段】ヘッド保持部材52の吸着面130をリボルバヘッド56の被吸着面200に密着させてヘッド吸着用負圧室204を形成し、リボルバヘッド56を負圧により吸着し、回転,昇降させる。リボルバヘッド56は12個ずつの吸着ノズル212,バルブ装置264を備え、ヘッド保持部材52の昇降に連動してレバー駆動部材510を回動レバー224,第一,第二バルブスプール280,310に係合させて吸着ノズル212を機械的に昇降させ、バルブ装置264を負圧供給状態と正圧供給状態とに機械的に切り換えさせ、吸着ノズル212に電子部品を吸着,装着させる。
(もっと読む)
フレキシブル電気機械式穴あけ装置
本発明は、ロボット・アーム若しくは同類機器に搭載され、又はそれによって制御され、且つ更に、マルチプル・パンチ7に連結された一連の穴あけ工具及び緩衝材4若しくはマルチプル工具5を保持するためのフレキシブル電気機械式穴あけ装置に関し、マルチプル・パンチ7自体は、工具交換装置6に固着された線形歯車装置1及び電気機械式駆動ユニット2を有するベース・ボディ3に連結が可能とされ、該穴あけ装置においては、同期化によってスプリング後退装置が排除され、且つ穴あけ工具ポジションが全ての方向において完全に制御され、且つまた、貫穿中のモータ電流及び工具ポジションの完全なフィードバックによって、穴あけされる材料に対して良好な穴あけが行われたことを判断することが可能とされる。  (もっと読む)
(もっと読む)
ロボットセルと、部材を交換並びにロボットセル内に貯蔵するための方法
ツール(11)並びに/若しくは製品(13)のような部材を交換並びに貯蔵するためのロボットセル(1)は、部材(11,12,13)を、ピックアップしてロボットセル外からロボットセル内に、またこの逆に移動させるのに適したロボット(3)と、このロボットの周りに少なくとも部分的に設置され、ロボットを用いてロボットセル外からロボットセル内に、またこの逆に交換若しくは貯蔵されなければならない部材の移動を可能にするようにインターチェンジ・ステーションを有する壁部と、少なくとも2つの位置を有する、壁部内のマガジン部分(4)と、ロボットを制御するための制御ユニットとを備えている。このロボットセルは、第1のプロセッサと、このプロセッサに相互接続されたメモリとをさらに有している。部材がインターチェンジ・ステーション内に位置されたとき、プロセッサは、メモリからのデータに基づいて、ロボットセル内の適切な位置を選択する。  (もっと読む)
(もっと読む)
1 - 18 / 18
[ Back to top ]