
Fターム[3C007HT30]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 歯車 (480) | 差動機構を有するもの (12)
Fターム[3C007HT30]に分類される特許
1 - 12 / 12
多関節ロボットおよびロボット関節構造
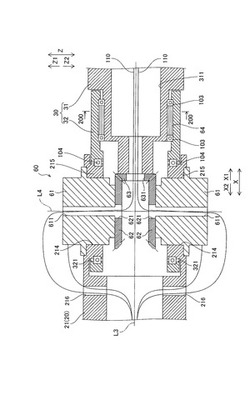
【課題】バックラッシュによるガタツキを抑制することにより、関節部を精度よく動作させることが可能な多関節ロボットを提供する。
【解決手段】この多関節ロボット100は、骨格フレーム21側に設けられ、互いに対向するように配置されるとともに、曲げ軸L4を回動中心として互いに独立して回動可能な一対の入力側傘歯車62と、一対の入力側傘歯車62の両方に噛み合うように骨格フレーム31側に設けられ、一対の入力側傘歯車62が回動することによって、回動軸L3を回動中心として回動可能であるとともに曲げ軸L4回りに揺動可能な出力側傘歯車63と、一対の入力側傘歯車62の両方に噛み合った状態で出力側傘歯車63を回動軸L3回りの一方の回動方向に付勢する定荷重バネ64とを含む。
(もっと読む)
ロボットのリンク装置

【課題】ロボットの歩行脚またはアームとして機能するロボットのリンク装置において、関節にガタなどを設けても、高精度に、第1のリンクに対する第2のリンクの回転角を制御できるようにする。
【解決手段】歩行脚またはアームを構成する第1および第2のリンク3、5と、リンク3、5を連結する関節7とを備える。関節は、第1および第2の関節部7a、7bを有する。第1および第2の関節部は、リンク3、5の一方に対し衝撃吸収用のガタをもって取り付けられ、リンク3、5との他方に対し関節の軸周りに回転可能に取り付けられる。第1および第2のモータ9、11は、第1および第2の関節部を同じ方向に回転駆動することで、第1のリンクに対し第2のリンクを回転させ、第1および第2の関節部を逆方向に回転駆動することで、回転方向のガタの大きさを調整する。
(もっと読む)
関節駆動装置及び多軸マニピュレータ
【課題】関節駆動装置の数を関節の数と等しくすることができ、駆動力伝達用の線状部材の経路長の変化を各関節部で解消することができるとともに、駆動力伝達用の線状部材の交換を短時間で容易に行うことができ、利便性を高めることができるようにする。
【解決手段】所定のリンク部材と次のリンク部材とを回転可能に接続する関節軸上に配設された関節部の駆動用の線状部材から駆動力を受けて回転することによって所定のリンク部材に対して次のリンク部材を回転させる被駆動部材と、関節軸上に配設された経路長補償ユニットであって、所定のリンク部材に対応して配設された他の関節部の駆動用の線状部材からの駆動力を、次のリンク部材に対応して配設された他の関節部の駆動用の線状部材に伝達するとともに、他の関節部の駆動用の線状部材の経路長の変化を吸収する経路長補償ユニットとを有する。
(もっと読む)
関節機構
【課題】1つの駆動源を動作させることによって2つの自由度を実現することができる関節機構を提供すること。
【解決手段】本発明の関節機構は、少なくとも固定状態となる第1のギア10と、第1のギア10の中心軸方向に第1のギア10と対向して配置され、回転可能とされた第2のギア20と、第2のギア20を回転させる第2のギア用駆動源21と、第1のギア10の中心軸方向と交差する方向に配置された棒状部材50と、棒状部材50とともに棒状部材50を中心軸として回転可能とされ、第1及び第2のギア10,20と噛み合う第3のギア30と、棒状部材50を中心軸として棒状部材50とは独立に回転可能であって、第1及び第2のギア10,20と噛み合う第4のギア40と、を備えていることを特徴とする。
(もっと読む)
マニピュレータ
【課題】開閉するエンドエフェクタを機械的に駆動操作する操作部における操作性を向上させる。
【解決手段】マニピュレータ10は、グリッパ軸入力部104を含む操作部14bと、エンドエフェクタ1300の向きを変える1以上の姿勢軸を含む先端動作部12と、操作部14bと先端動作部12を連結する連結シャフト18と、姿勢軸を駆動するモータ60、62と、グリッパ軸入力部104の人手による操作を機械的に伝達して、エンドエフェクタ1300を駆動するエンドエフェクタ駆動機構1320aとを有する。グリッパ軸入力部104は、開閉軸106を基準にして開閉する第1指掛部108及び第2指掛部110を備える。第1指掛部108は固定され、第2指掛部110が第1指掛部108に対して相対的に開閉動作し、第1指掛部108と第2指掛部110が閉じることによってエンドエフェクタ1300が閉じる。
(もっと読む)
医療用器具の製造方法及び医療用器具
【課題】医療用器具の先端部の鋏を、対象物を切断し易いように高精度に組み立てる。
【解決手段】鋏機構1300をユニットとして組み立てる。鋏機構1300は、重ねた一対のエンドエフェクタ部材1308を基端の軸部で所定の擦り合わせ状態でボルト体1217ト及びナット1219により開閉可能に締結する。ボルト体1217は軸線方向に貫通形成された中心孔1217dを有する。連結シャフト18先端に連結されるカバー1160の筒内に鋏機構1300を挿入すると共に、受動板1158に対してリンク1220a、1220bによりエンドエフェクタ部材1308を接続する。鋏機構1300とカバー1160の内面との間に形成される隙間にスペーサ1340を配置する。カバー1160の孔1307とボルト体1217の中心孔1217dとに対し、カバー1160の外面側からピン1196を嵌挿する。
(もっと読む)
干渉駆動関節機構
【課題】慣性力が小さく、高出力な多自由度の干渉駆動関節機構を得る。また、動力源が発生する駆動力のほとんどを出力軸の負荷を支える力として利用でき、エネルギー効率が良い干渉駆動関節機構を得る。
【解決手段】本発明は、二つの動力源の入力から二軸方向の回転量を出力する差動駆動機構を二組有し、それぞれから得られる四つの回転軸まわりの回動を干渉させ、一自由度を縮退させて、姿勢成分の三自由度を出力として得られる冗長駆動性を有した多自由度関節機構である。
(もっと読む)
ロボットの関節装置
【課題】人や動物などに触れるロボットの関節装置であって、人に触れた場合に当該人が不快感を覚えることなく実際の人と接触しているような状態を実現できるロボットの関節装置を提供する。
【解決手段】ロボット1の関節装置は、回転可能且つ軸方向に移動可能に軸支されウォーム32aを備える軸部材32と、ウォーム32aに噛合し出力部材38が連結されるウォームホイール36を備える。ウォームホイール36は、ウォーム32aの回転により回転し、ウォームホイール36から軸部材32に逆入力されると軸部材32を軸方向に移動させる。軸部材32の軸方向移動量は検出部45により検出され、外力推定部80が、検出部45により検出される軸方向移動量に基づいて出力部材38が受けた外力を推定する。そして、制御部70が、指令値および外力推定部80により推定された外力に基づいて、アクチュエータ34を制御する。
(もっと読む)
脚式ロボット
【課題】脚部を大型化することなく段差の昇降性能を向上させる。
【解決手段】基体10に複数の脚部20が設けられた脚式ロボットであって、基体10は、基体前後方向の前側基体11と、基体前後方向の後側基体12と、前側基体11及び後側基体12を、ロール軸回りに相対変位可能な状態で連結する腰関節13と、を備える。前側基体11及び後側基体12には、夫々、複数の脚部20を設けている。腰関節13により、前側基体11と後側基体12との間には、ロール軸回りの自由度が与えられるので、一方に対して他方を捻ることが可能となる。
(もっと読む)
アームの関節
【課題】低コストで軽量・コンパクトなアームの関節を提供する。
【解決手段】直交する2つの回転軸L1、L2周りに相対回転可能に連結された第1リンク1、第2リンク2と、第1リンク1側の回転軸である2本の差動入力軸5a、5bを独立駆動する駆動手段A、Bと、差動入力軸5a、5bの端部に固定され、駆動手段A、Bの駆動制御信号として、各軸の回転角度情報を計測する回転角度センサ30a、30bとを備えたアームの関節であって、駆動手段A、Bが、回転軸の並進方向と回転方向に移動自在に支持され、かつ所定の位置に弾性的に保持されたウォーム12a、12bと、それと係合する一対のウォームホイール11a、11bとを備え、アームの外部環境への衝突または接触による衝撃力を、弾性的に保持されたウォーム12a、12bの並進移動により吸収緩和し、回転角度センサ30a、30bの出力信号に基づき、衝突を検知する。
(もっと読む)
遊星差動歯車による非干渉関節機構
【課題】 小型で可動範囲が広く、一方の作動量が他方の作動量に影響しない、非干渉の関節を実現する。
【解決手段】 反転用歯車を介し同軸上で差動回転する平歯車1a,1bの組と2a,2bの組を噛み合せて関節を形成し、一方の組が他方の組の平歯車の周りを公転することで関節の角度を変化させる。これにより関節の角度を変化させても歯車の回転に影響はなく、歯車を回転させても関節の角度に影響のない関節ができる。
(もっと読む)
作業補助アーム
【課題】別途にセンサを必要とせず、任意の案内面上に拘束することができる作業補助アームを得る。
【解決手段】3軸の変位量に基づきその作業座標が決定されるアームを設け、3軸をそれぞれ対応した3つの変速機を介して差動機構で結合し、3つの変速機の変速比を、指示された案内面以外へのアーム手先の移動を拘束するよう制御装置41によって制御するようにした作業補助アームであって、3軸の回転角度を検出する回転角度検出器40と、ユーザにより指示された仮想的な案内面を入力する面指示手段42とを設け、制御装置41は、検出された回転角度、及び指示された仮想的な案内面に基づき、現在のアーム手先の位置を含み、かつ前記案内面とは平行ではない補正用案内面を計算する補正用案内面計算手段301を含み、補正用案内面計算手段301により計算された補正用案内面に沿って、前記アーム手先が動くように3つの変速機の変速比を求める。
(もっと読む)
1 - 12 / 12
[ Back to top ]