
Fターム[3C007KX08]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411) | 指、吸着パッドに設けるもの (181)
Fターム[3C007KX08]に分類される特許
181 - 181 / 181
被製版ロールの取り扱い方法、及びロボットハンド
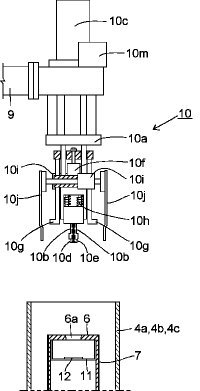
【課題】立て置きされていてかつダンボール紙等の養生材で巻かれている大きさが様々に異なる被製版ロールを横振れを抑えて迅速に吊り上げることができて、高い作業効率が得られる,被製版ロールの取り扱い方法、及びロボットハンド。
【解決手段】CCDカメラにより被チャック孔を検出するとともに、距離センサーにより被製版ロールの端面までの距離を検出し、チャック爪の中心を被チャック孔の中心に位置合わせしかつ前記検出した距離に基づいてチャック爪を移動して被製版ロールの被チャック孔に差し込み、チャック爪を開いてフランジを引っ掛けかつ端面押圧板をロール端面に押付けてチャック爪と共同して被製版ロールの横振れを抑え、養生材押さえプレートにより被製版ロールを巻いている養生材を保持して被製版ロールを吊り上げ・吊り下しする。
(もっと読む)
181 - 181 / 181
[ Back to top ]