
Fターム[3C007KX08]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411) | 指、吸着パッドに設けるもの (181)
Fターム[3C007KX08]に分類される特許
41 - 60 / 181
流体圧伝達装置及びロボットハンド装置
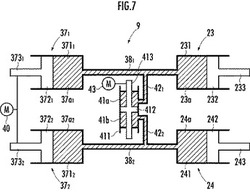
【課題】小型化及び軽量化を図ることができる流体圧伝達装置、及びこれを備えたロボットハンド装置を提供する。
【解決手段】流体圧伝達装置は、複数の主駆動流体圧シリンダ371,372と、主駆動流体圧シリンダ371,372のシリンダ室3711,3712と流体圧伝達路381,382を介してシリンダ室23a,24aが連通される複数の従動流体圧シリンダ23,24と、ピストン412で2つのシリンダ室41a,41bに区切られた副駆動流体圧シリンダ41とを備え、主駆動流体圧シリンダ371,372が発生した流体圧を従動流体圧シリンダ23,24に伝達する。ピストン3711,3712は主モータ40により、ピストン412は副モータ43により、夫々駆動される。流体圧伝達管381,382と副駆動流体圧シリンダの各シリンダ室41a,41bとは連通管421,422に介して連通する。
(もっと読む)
多指ハンド装置

【課題】拇指機構、示指機構及び中指機構を用いて物体の安定した把持状態を実現することができる多指ハンド装置を提供する。
【解決手段】屈伸機能を有する示指機構6、中指機構7、及び拇指機構5を備える多指ハンド装置1において、拇指機構5の2軸で回動する手根中手関節19,20のうちの第2の回動軸20を、その軸線aが示指機構6の中手指節関節15,16と中指機構7の中手指節関節15,16との間を通って延びるように配設する。
(もっと読む)
接触検出装置及びロボット
【課題】外部から加えられる力に対する接触センサの耐久性を従来よりも高めること。
【解決手段】ロボットに対する物体の接触を検出する接触検出装置であって、ベース層51と、ベース層51上に積層されると共に、少なくとも部分的に粗面を有する抵抗層52と、抵抗層52上に積層されると共に、抵抗層52の粗面に対応する粗面を有する抵抗層54と、ベース層51上に積層されると共に、抵抗層52、54間に層間空間を形成するスペーサ層53と、を備え、抵抗層52、54間の間隔は、抵抗層52、54の少なくとも一方の変形時、抵抗層52の粗面と抵抗層54の粗面間に摩擦が生じるように設定されている。この構成を採用することによって、外部から加えられる力に対する接触センサの耐久性を従来よりも高めることができる。
(もっと読む)
搬送ロボット及び自動教示方法
【課題】 予め定められた一方向にエンドエフェクタを移動させることで教示位置を教示可能な自動教示装置を提供する。
【解決手段】 半導体搬送ロボット1は、ハンド2と、第1及び第2光電センサ14,15と、制御部28とを有する。第1及び第2光電センサ14,15は、ハンド2に設けられ、互いに異なる方向に延びる光軸L4,L5を有する。制御部28は、予め定められた仮教示位置pcに向かってハンド2を移動させて第1及び第2光電センサ14,15により正教示位置prに配置される冶具31に立設されるピン32を夫々検出させ、検出したときのハンド2の位置である第1及び第2検出位置p1,p2に基づいて正教示位置prと仮教示位置pcとのズレ量Δr、Δθを演算して正教示位置prを求める。制御部28は、ピン32を検出させる際、光軸L4.L5が延びる方向と異なる方向にハンド2を移動させる。
(もっと読む)
触覚センサー装置およびそれを用いたロボット
【課題】より正確な力の検出が可能な触覚センサー装置およびそれを用いた構造が簡単で小型のロボットを得ること。
【解決手段】触覚センサー81,82の検出期間がそれぞれ異なるので、他の触覚センサー81または82の振動の伝達による検出時のSN比の低下を抑えることができる。したがって、より正確な力の検出が可能な触覚センサー装置1000を得ることができる。また、触覚センサー81,82を順次駆動するので配線が少なくてすみ、前述の効果を備え、構造が簡単で小型のロボット100を得ることができる。
(もっと読む)
摩擦係数同定方法、把持制御方法、この把持制御方法を行うロボットハンド及びプログラム
【課題】物体を傷つけることのない、複数の指で物体を把持して持ち上げるロボットハンドの各指と物体との間の摩擦係数同定方法、把持制御方法、この把持制御方法を行うロボットハンド及びプログラムを提供する。
【解決手段】各指を物体の表面に接触させて物体に法線力を加え(ステップS1)、法線力を徐々に増加させる。力覚センサが法線力を検知し始めたら、法線力を増加させながらロボットハンドを上昇させて、各指を物体の表面に沿って滑らせる(ステップS2)。各指の力覚センサが法線力及び接線力を検知し(ステップS3)、接線力が一定となったら(ステップS4)、接線力が一定になった指の駆動を停止し(ステップS5)、駆動が停止した指について摩擦係数を算出する(ステップS6)。
(もっと読む)
5指型ハンド装置
【課題】人間の手と同様の動作と十分な把持力を得ながら小型軽量化を可能として、ヒューマノイドロボットに好適に採用できる5指型ハンド装置を提供する。
【解決手段】基部4と5つの機構5〜9とを備えるハンド本体2を設け、指機構を駆動する駆動手段3を設ける。駆動手段3は、ハンド本体2内で指機構を作動させる従動流体圧シリンダと、ハンド本体2の外部にあって従動流体圧シリンダに流体圧伝達管45を介して接続された駆動流体圧シリンダ37と、駆動流体圧シリンダ37から従動流体圧シリンダに伝達される作動用流体圧を調節して指機構の屈伸を制御する制御手段36とを備える。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がより安定に把持されるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】物体がハンド1により把持されることによって複数の指機構11〜15および手の平部10のそれぞれに当接している状態において、複数の指機構11〜15のそれぞれから当該物体にかけられる荷重が調節されうる。これにより、手の平部10における荷重中心p0の位置が目標手の平領域PAに含まれるように変位されうる。また、手の平部10にかかる荷重f0が目標荷重範囲FAに収まるように調節されうる。
(もっと読む)
5指型ハンド装置
【課題】人間の手と同様の動作を実現し且つ小型軽量化を可能とすることにより、ヒューマノイドロボットに好適に採用できる5指型ハンド装置を提供する。
【解決手段】示指機構6と中指機構7との何れか一方又は両方及び拇指機構5に、指先部に作用する力を検出する力センサ21を設ける。力センサ21を備える指機構を、指先でのつまみ動作を含む器用動作を行う器用指とする。器用指以外の指機構は、器用指の動作に応じて握り動作を含む力動作を行う力指とする。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がその載置箇所から安定に持ち上げられるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】ハンド1が有する第1種の指機構11〜13の動きにより物体がつままれた上で、この物体の一部を載置箇所に当接させたままで他の部分が持ち上げられる。さらに、手の平部10の位置および姿勢が制御されることにより、手の平部10と物体との当接箇所が広げられる。そして、複数の指機構11〜15の動きが制御されることにより当該複数の指機構11〜15により物体が握られる。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】配管等の配置の自由度を高めながら、指機構の動作を安定に制御することができるシステム等を提供する。
【解決手段】ハンド1によれば、配管33に流体の圧力に応じた断面積変化が許容される程度の柔軟性を持たせ、これによって配管33およびこれを介して連結されているマスタシリンダ31の配置自由度を高めることができる。また、配管33中の流体圧力に応じて生じる配管33の断面積変化が考慮されるので、スレーブピストン位置Pxが高精度で測定されうる。
(もっと読む)
計測機能付きチャック装置及びロボットチャック装置
【課題】計測機構が小型軽量で且つ適切に収容され、計測精度を向上できると共に、安価に製造できる計測機能付きチャック装置及びロボットチャック装置を提供すること。
【解決手段】一方の電極11に対し、他方の電極12が、所要の間隔を保ちつつスライド可能に配されたセンサー部10と、両電極11、12に関する静電容量を検出する容量検出素子40と、容量検出素子40によって得られた信号に基づいて一方の電極11に対する他方の電極12の変位に関する計測情報を出力する計測情報出力回路50と、一方の電極11が固定されると共に、計測と同時に保持されるべきワークの一端側に当接されるストッパ部22を有するチャック用基部20と、他方の電極12が装着されて一体となってストッパ部22に対して接離動可能に設けられ、前記ワークの他端側に当接されるチャック用可動爪部30とを備える。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを適切な位置に整列積載する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。両ハンド部2a、2bによってワークWaを保持しているとき、制御部は、先に第1ハンド部2aを退避させ、ワークWaの第1ハンド部2a側の隅部を降下させる。次に、制御部は、第2ハンド部2bを退避させ、ワークWaの第2ハンド部2b側の隅部を降下させ、ワークWaをワークWb上に積載する。これにより、先の第1ハンド部2aの退避時においても、またその後の第2ハンド部2bの退避時においても、各ハンド部の摩擦力が動摩擦となり、それぞれの動作時にワークがハンド部に引っ張られることがなくなる。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを歪むことなく保持する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。ワークWがストッパ91によって位置決めされているとき、制御部は、両ハンド部2a、2bを移動させて両爪21、22の間にワークWを位置させる。そして、両ハンド部2a、2bを距離m1だけ移動させることにより、ワークWを押し動かしてワークWとストッパ91との間にクリアランスCを生じさせる。これにより、その後、両ハンド部2a、2bの短爪22を可動させても、ワークWがストッパ91に押し付けられて歪むことがなくなり、ワークWを長爪21に押し付けて保持することができる。
(もっと読む)
情報提供装置
【課題】ユーザの意思を反映した適切な情報提供を行う。
【解決手段】腕部移動量検出系36により検出される、腕部30が物体(絵画等)を指し示すために移動した移動量と、ロボット位置検出系24により検出されるグローバル座標系上における情報提供ロボットの位置及び向き(回転)と、に基づいて、腕部30の手先が指し示す方向のベクトル及び手先位置(ベクトルの始点)をグローバル座標系上にて算出し、この算出結果と、物体の位置座標データとに基づいて、物体特定部56が、腕部30の手先が指し示している物体を特定し、情報提供部58が特定された物体の情報をユーザに提供する。
(もっと読む)
ロボットハンド用撮像装置内蔵フィンガ
【課題】発光手段を用いなくとも対象物との接触部位を撮像することのできるロボットハンド用撮像装置内蔵フィンガを提供することにより、コストの低減を図ることを課題とする。
【解決手段】対象物10を把持することで変形する弾性外皮12と、弾性外皮12を支持するフィンガ本体11と、フィンガ本体11の内部に設けられて弾性外皮12の変形状態を撮像する撮像装置13とを有する。さらに、ロボットハンド用撮像装置内蔵フィンガ101において、フィンガ本体11は、外部から撮像装置13の撮像範囲F1に光を導入する光透過部11及び12を備える。
(もっと読む)
ロボット
【課題】ロボットにより行われるドア開閉方法に関し、特に開閉方向が未知であるドアを自動的に開閉できるようにする。
【解決手段】ロボットは、ロボットアーム1と、取っ手を把持するハンド形状あるいは引っ掛けられる形状の手先効果器2を備えており、ロボットがドア取っ手を把持している手先を様々な方向に動かし、力検出部3により力情報を検出するとともに手先位置計算部4により算出された手先の位置変位を検出する。力検出部3で検出された力が閾値以上ならば真のドア開閉方向ではなく、力検出部3で検出された力が閾値以下かつ手先位置計算部4により算出された動作の試行前後の手先の位置変位があれば、真のドア開閉方向であるものとする。
(もっと読む)
ロボットハンド用フィンガ
【課題】発光手段を用いなくとも対象物との接触を検出することのできるロボットハンド用フィンガを提供することにより、コストの低減を図ることを課題とする。
【解決手段】ロボットハンド用フィンガ101は、把持する対象物10に対して接触する把持部A1を有する。そして、ロボットハンド用フィンガ101は、把持部A1に開口11cが形成されたフィンガ本体11と、開口11cに設けられ、開口11cから外方に突出する凸状をした凸面14a1を有するレンズ14aと、フィンガ本体11の内部に設けられて、レンズ14aを透過する光を検出する二次元CCDイメージセンサ15とを備える。
(もっと読む)
ロボットハンド用フィンガ
【課題】超音波アクチュエータの駆動停止後においても十分な把持力を維持することのできるロボットハンド用フィンガを提供する。
【解決手段】ロボットハンド用フィンガは、超音波アクチュエータにより対象物20を把持するものである。そして、ロボットハンド用フィンガは、超音波アクチュエータにより駆動されるフィンガ本体11と、フィンガ本体11の外表面11cにおける把持する対象物20に接触する部位を少なくとも覆う弾性を有する弾性層12とを備える。
(もっと読む)
多指ハンドおよびロボット並びに多指ハンドの把持方法
【課題】物体の形状に影響されることなく物体を傷付けることなく最適な力で把持できるようにした多指ハンドおよびロボット並びに多指ハンドの把持方法を提供する。
【解決手段】物体を把持する多指ハンドであり、指部に設けられた物体との相対位置を検出した検出結果に応じて駆動部を制御する制御手段と、指先と物体との接触状態を調整する手段とを備え、指部の先端部に設けた少なくとも2つの感圧素子を設け、すべり量検出手段として、光源と、画像情報を取り込むイメージセンサと、イメージセンサの画像情報の差分に基づいて多指ハンドに対する物体の相対的な移動量を演算する演算手段とを具備する。
(もっと読む)
41 - 60 / 181
[ Back to top ]