
Fターム[3C007KX08]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411) | 指、吸着パッドに設けるもの (181)
Fターム[3C007KX08]に分類される特許
21 - 40 / 181
ロボット装置およびロボット装置による把持方法
【課題】対象物の位置情報に誤差が含まれる場合にも、確実に対象物を把持することが可能なロボット装置を提供する。
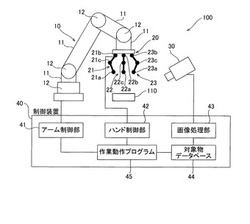
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられ、力制御を行うための力センサ21a、22aおよび23aを有する多指ハンド部20と、視覚センサ30による検出により、把持対象物110の少なくとも位置情報を取得する画像処理部43と、画像処理部43により取得した把持対象物110の少なくとも位置情報に基づいてロボットアーム10を移動させて把持対象物110に多指ハンド部20を近づけていき、多指ハンド部20の力センサ21a、22aおよび23aの出力に基づいて把持対象物110に対する実際の接触位置を検出し、検出した接触位置の情報に基づいて把持対象物110の位置情報を修正する制御装置40とを備える。
(もっと読む)
ロボット装置

【課題】把持対象物の把持状態を維持することが可能な把持形態を選択することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられた多指ハンド部20と、視覚センサ30による検出により、把持対象物110の位置情報および形状情報を取得する画像処理部43と、把持対象物110の位置情報および形状情報に基づいて多指ハンド部20による把持形態の候補を複数抽出するとともに、抽出された複数の把持形態の候補についての多指ハンド部20の関節トルクに基づいて、抽出された複数の把持形態の候補の中から1つの把持形態を選択する制御装置40とを備える。
(もっと読む)
ロボットハンド、およびロボット
【課題】グリッパー型ロボットハンドと同程度に単純な構造でありながら、人間型ロボッ
トハンドのように高い汎用性を有するロボットハンドを提供する。
【解決手段】指部の先端側の腹部の一部を、別部材(指先部材)を用いて構成し、この指
先部材は、指部に収納した状態と、指部から突出した状態とに切り換え可能とする。また
、把持する対象物を検出する圧力センサーは、指先部材に設けておく。こうすれば、大き
な対象物や重い対象物については、指先部材を収納して指部の腹部で把持することで、し
っかりと把持することができる。また、小さな対象物については、指先部材を突出させて
、指先部材で把持する。何れの場合でも圧力センサーは1つでよいので、構造を単純化す
ることができる。
(もっと読む)
支持装置および支持方法ならびに搬送装置および搬送方法
【課題】支持姿勢や搬送動作にかかわらず板状部材の撓みを抑制できる支持装置および支持方法ならびに搬送装置および搬送方法を提供すること。
【解決手段】接着シートMSが貼付された板状部材Wの搬送装置1は、接着シートMSを介して板状部材Wを保持する保持手段2と、保持手段2で保持された板状部材Wを付勢して板状部材Wの面位置を所定位置に維持する面位置維持手段6と、保持手段2を移動させる移動手段3とを備え、面位置維持手段6は、板状部材Wを一方側に付勢するかまたは他方側に付勢することで、板状部材Wの支持姿勢や搬送動作にかかわらず板状部材Wの面位置を維持することができる。
(もっと読む)
ロボットアームのためのハンドカメラ装置
【課題】 ハンドに突出部を形成することなく、しかも、ロボットアームの制御系を複雑にすることなく、把持した把持対象物を正確に目標位置に移動、位置決め可能とする。
【解決手段】 ロボットアームのハンドに、把持対象物の位置及び方向を観測するカメラを設置し、その撮像情報に基づいて把持対象物を認識し、ハンドで把持させた後、目標位置を探索及び認識して、把持対象物を目標位置に移動させるロボットアーム及びハンドの制御装置において、ハンドの把持部に前方カメラを設けるとともに、側方にも側方カメラを設置し、ハンドが把持対象物を把持する直前あるいは直後において、前方カメラの撮像情報に基づく制御から、側方カメラの撮像情報に基づく制御に切り換える切換手段を具備させ、把持した把持対象物に視界を妨げられることなく、把持対象物を正確に目標位置に移動、位置決めすることができる。
(もっと読む)
ワークの把持方法
【課題】バラ積み状態のワークを多フィンガのハンドで把持する場合に他のワークが対象ワークの上に重なっている状態であっても、ワークの把持を可能にし、ワークの把持成功率を向上させるワークの把持方法を提供する。
【解決手段】2つの把持装置(第1乃至第4フィンガF1乃至F4)を用いてワーク(リンフォースメントW)を把持するとき、把持しようとする把持対象ワーク(把持対象リンフォースメントT)に対して把持装置を挿入する一方の把持装置挿入箇所(領域A)に他のワークとの干渉がない状態で、一方の把持装置挿入箇所に第1の把持装置(第1フィンガF1及び第2フィンガF2)を挿入して把持対象ワークを把持して持ち上げる片持ち把持工程と、第1の把持装置によって持ち上げられた把持対象ワークのまわり(領域D)に第2の把持装置(第3フィンガF3及び第4フィンガF4)を挿入して把持する両持ち把持工程と、を含むワークの把持方法。
(もっと読む)
器用なロボットの多軸ロードセルを較正する方法および装置
【課題】ロボットハンド内のロードセルを自動較正すること。
【解決手段】ロボットジョイントA,B,C,D,E,Fと、対応するジョイントの1つにおいてジョイント角度を測定するように構成された角度センサ15と、ロボット10の所定の姿勢の間に、ロードセル18の対応する1つに付与されるひずみ値のセットを測定するためのロードセルと、を備える。ホストマシン32は、ロードセルおよび角度センサに電気的に接続され、所定の姿勢の間にジョイント角度値およびひずみ値を受け取る。ロボットは、ロードセルの係合ペアを互いに圧して所定の姿勢を形成する。ホストマシンは、ジョイント角度およびひずみ値を処理するアルゴリズムを実行し、力バランス方程式内の誤差を最小化する全ての較正マトリックスのセットから、予め特定された値に最も近い較正マトリックスのセットを選択する。また、アルゴリズムを介してロードセルを較正する方法が提供される。
(もっと読む)
ロボットの把持制御システム及びロボット
【課題】把持の成否の判定基準を、物体やタスクに応じて適切な基準となるように柔軟に変更可能とすること。
【解決手段】本発明に係るロボット10の把持制御システムは、物体と、その物体に応じた目標把持状態を含む把持方法情報とが対応付けて記憶された把持方法DB30と、把持方法DB30に記憶された把持方法情報に従って物体をハンドにより把持させる際に当該把持の成否の判定に利用する判定基準情報で、目標把持状態に対するセンサ11で検出される把持状態の一致度に関する判定基準情報が、物体と対応付けて記憶された把持判定基準DB40と、把持判定基準DB40を参照して、指令される物体に応じた判定基準情報を取得して把持判定基準情報として決定する把持判定基準決定器60と、一致度が、決定された把持判定基準情報に基づいて把持の成否を判定する把持成否判定器70と、を備える。
(もっと読む)
基板搬送ロボット
【課題】搬送ロボットを用いて、カセットに収容された液晶基板等の板状の基板を搬出する際に、基板検出センサを用いて基板の位置を検出していた。従来は、基板がカセットの手前側(入り口側)に寄せられてカセット内部に収容されていたが、基板がカセットの奥側に寄せられる場合があり、従来の搬送ロボットでは対応できない。
【解決手段】本発明の搬送ロボットは、ハンド4の先端付近に取り付けられた基板の有無を検出する基板検出センサ5と、ハンドの位置を移動させる移動機構11(アーム機構2等)と、ハンドの位置及び移動速度を制御する動作制御部12と、基板のエッジ位置を演算する基板エッジ位置解析部13とを備えた。上記構成にすると、基板がカセットの奥側に寄せられて収容された場合であっても、基板の位置を検出できる。
(もっと読む)
ロボットハンド
【課題】所望位置で把持対象物を把持可能なロボットハンドを提供する。
【解決手段】把持対象物であるティッシュボックスQや紙コップTを把持する指部81を備えた把持部99は、以下のように構成されている。即ち、指部81のリンク84の把持面84aの所望位置に、把持面84aから突出する突起部84eを設けた。突起部84eは、指部81のリンク84の把持面84aの略中央に形成されている。突起部84eは、シリコンゴムなどの弾性体によって形成されている。突起部84eは、シリコンゴム、ウレタンゴム、又は、クロロプレンゴムによって形成されている。把持面84aには、荷重位置を検出可能な接触抵抗式面センサ84bが設けられている。
(もっと読む)
滑り覚検知装置及び滑り覚検知方法
【課題】力覚センサを用いて滑り覚を検知する滑り覚検知装置及び滑り覚検知方法を提供する。
【解決手段】部品Pと接触部R4との間に生じた滑りを検知する滑り覚検知装置であって、歪検出用抵抗素子Sを用いて接触部R4に印加された外力Fを検出する力覚センサ1と、歪検出用抵抗素子Sに所定周波数の初期信号を入力する信号入力部9と、歪検出用抵抗素子Sからのセンサ出力信号Vs’を周波数解析する周波数解析部62と、周波数解析部62において検出された周波数成分のうち、初期信号の周波数成分と異なる周波数成分の強度が閾値を超える場合は、部品Pと接触部R4との間に滑りが生じたと判定し、初期信号の周波数成分と異なる周波数成分の強度が閾値以下である場合は、部品Pと接触部R4との間に滑りが生じていないと判定する滑り覚判定部63と、を備える。
(もっと読む)
把持装置
【課題】対象物の内周面を利用して対象物を把持する場合に、複数の把持部で対象物を把持する前にいずれかの把持部が内周面に当たって、その結果、対象物の位置または姿勢が変化してしまうことを防止する。
【解決手段】対象物1の内周面1aを利用して対象物1を把持する把持装置10。対象物1を把持する複数の把持部3a、3b、3cと、これら把持部の動作を制御する制御装置11と、を備える。複数の把持部は、内周面1aの中に挿入された状態で、互いに離間する方向に離間駆動され、これにより、内周面1aに押し付けられることで対象物1を把持する。さらに、把持部に設けられた位置情報取得センサ11aを設ける。離間駆動の時に、位置情報取得センサ11aは、把持部と内周面1aとの位置関係を検出し、制御装置11は、該位置関係に基づいて把持部の位置を調整する。
(もっと読む)
触覚センサおよびそれを備えたロボット
【課題】検知部の破損および弾性部材の剥離を防止可能な触覚センサを提供する。
【解決手段】触覚センサ10は、基板1と、酸化膜2と、検知部3(31,32)と、弾性部材4と、金属プレート5とを備える。酸化膜2は、基板1上に形成される。検知部3(31,32)は、酸化膜2上に配置される。弾性部材4は、金属プレート5から突出した突出部41,42を有する。弾性部材4は、突出部41,42がそれぞれ検知部31,32を覆うように基板1および酸化膜2上に配置される。金属プレート5は、弾性部材4の突出部41,42と所望の間隔を隔てて突出部41,42の周囲および弾性部材4上に配置される。
(もっと読む)
ロボットの駆動システム、及び、ロボットの駆動プログラム
【課題】 形状が複雑で自己遮蔽の多い動作物の動作にもとづき、見まね(非接触的方法)によりロボットを駆動するシステムを提供することにある。
【解決手段】 ロボットの複数の画像データと事前収集動作指令とを対応付けて画像対応動作指令記憶手段11に記憶する。ロボットを動作させるために、動作物に所望の動作を行わせ、その際に動作物の画像データを時系列でロボット動作用画像データとして取得する。画像データ特定及び動作指令発生装置14は、ロボット動作用画像データに含まれる画像データに対応する画像データを画像対応動作指令記憶手段11に記憶している複数の画像データから時系列で特定し、特定した画像データに対応する事前収集動作指令を動作指令としてロボットに与えてロボットを駆動する。これによりロボットは、動作物の形状の複雑さや自己遮蔽を解消して見まねにより動作する。
(もっと読む)
光学式位置検出装置、ハンド装置およびタッチパネル
【課題】比較的簡素な構成および信号処理で、対象物体の位置や、対象物体が至近位置に到達したことを確実に検出することのできる光学式位置検出装置、並びに当該光学式位置装置を備えたハンド装置およびタッチパネルを提供すること。
【解決手段】光学式位置検出装置10では、光源装置11が透光部材40において対象物体Obが位置する第1面41側とは反対側の第2面42側から検出光L2を出射して第1面41側に第1面41に対する法線方向で強度が変化する離間距離検出用光強度分布L2Zabを形成する。また、対象物体Obで反射して透光部材40の第2面42側に透過してきた反射光L3を光検出器30で検出する。透光部材40の第1面41は、弾性および対象物体Obに対する吸着性を備えている。
(もっと読む)
電子部品把持装置及び電子部品検査装置
【課題】電子部品を載置するトレイなどの高さを適宜自動的に測定することのできる電子部品把持装置及び電子部品検査装置を提供する。
【解決手段】供給側ロボットハンドユニット20は、電荷を拡散させる材料からなるトレイに載置されたICチップを把持部32を当接させて把持する当接装置20Aと、当接装置20Aをトレイに対して上下方向に駆動制御する制御手段とを備える。把持部32は当接装置20Aにて独立した導電性を有するとともに、電荷の拡散に基づいて電荷を拡散させる部材との当接を検出する当接検出装置40が接続され、制御手段は、電荷を付与された把持部32をトレイに下降させ、把持部32のトレイへの当接を検出したとき、把持部32の上下方向の位置を測定する。
(もっと読む)
ロボットハンド
【課題】付加ビジョンセンサが不要でコンパクトであり、暗闇の中でもすべりによる落下することなく、把持することができるロボットハンドを提供する。
【解決手段】指部を屈曲させることで物体を把持するロボットハンドであって、手掌部または指部に設けられた接触検出手段と、検出結果に応じて駆動部を制御する手段を有し、検出手段は、物体に光を照射する光源と、物体の光が照射された部位の画像情報を取り込むべく光を集光するレンズを具備したイメージセンサと、上記レンズの焦点を変化させるレンズ移動機構と、取り込んだ画像情報の差分に基づいて、物体の相対的な移動量を演算する演算手段と、を有し、レンズの焦点と物体の位置との一致・不一致を判断して手掌部または指部と物体との接触を検出するとともに物体の外形形状を検出し、かつ、物体表面の相対的な移動量を演算する手段と、を有して構成する。
(もっと読む)
ロボット親指アセンブリ
【課題】ロボット手アセンブリのための改良されたロボット親指を提供すること。
【解決手段】本開示の第1の態様によれば、ロボット親指中の改善された腱ルーティングにより、5つの腱のみによる4自由度の制御が実現される。本開示の別の態様によれば、人間の親指の5自由度の中の1つが、ロボット親指においては、指骨の形状の永久ねじりと置換される。本開示のさらに別の態様によれば、位置センサが、異なる中心点を有する円セグメントとして形状設定された2つの部分を有する磁石を含む。この磁石は、ホール効果センサから線形出力を生成する。
(もっと読む)
ロボット指アセンブリ
【課題】ロボット指アセンブリを提供すること。
【解決手段】ロボット手が、第1、第2、および第3の指骨を有する指を備える。第1の関節が、ベース構造体に対して第1の指骨を回転自在に連結する。第2の関節が、第2の指骨に対して第1の指骨を回転自在に連結する。第3の関節が、第2の指骨に対して第3の指骨を回転自在に連結する。第2の関節および第3の関節は、第2の指骨に対する第3の指骨の位置が第1の指骨に対する第2の指骨の位置によって決定されるように、運動学的にリンクされる。
(もっと読む)
流体圧伝達装置及びロボットハンド装置
【課題】小型化及び軽量化を図ることができる流体圧伝達装置、及びこれを備えたロボットハンド装置を提供する。
【解決手段】流体圧伝達装置は、複数の主駆動流体圧シリンダ371,372と、主駆動流体圧シリンダ371,372のシリンダ室3711,3712と流体圧伝達路381,382を介してシリンダ室23a,24aが連通される複数の従動流体圧シリンダ23,24と、ピストン412で2つのシリンダ室41a,41bに区切られた副駆動流体圧シリンダ41とを備え、主駆動流体圧シリンダ371,372が発生した流体圧を従動流体圧シリンダ23,24に伝達する。ピストン3711,3712は主モータ40により、ピストン412は副モータ43により、夫々駆動される。流体圧伝達管381,382と副駆動流体圧シリンダの各シリンダ室41a,41bとは連通管421,422に介して連通する。
(もっと読む)
21 - 40 / 181
[ Back to top ]