
Fターム[3C007KX08]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411) | 指、吸着パッドに設けるもの (181)
Fターム[3C007KX08]に分類される特許
141 - 160 / 181
圧力分布情報検出装置及び圧力分布情報検出方法
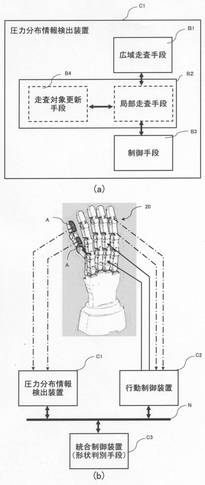
【課題】センサユニットを高密度に配置した触覚センサであっても、短時間に正確な圧力分布情報を計測することができる圧力分布情報検出装置及び圧力分布情報検出方法を提供する。
【解決手段】対象物からの加圧により電気特性値が変化する複数のセンサユニット6がマトリックス状に配列された触覚センサAに対して、予め設定された所定のセンサユニット6に対して配列順に走査して各電気特性値を検出する広域走査手段B1と、前記広域走査手段B1により検出された何れかのセンサユニット6の電気特性値が所定の閾値以上となるときに、当該センサユニット6を中心として、当該センサユニット6及びその周囲のセンサユニット6に対してのみ走査して各電気特性値を検出する局部走査手段B2を備えて構成される。
(もっと読む)
ロボットハンド装置

【課題】物体に衝撃を与えることなく、物体を置くことができるロボットハンド装置を提供することを課題とする。
【解決手段】ロボットハンドで物体を把持し、把持した物体を所定の場所に置くロボットハンド装置であって、ロボットハンド装置のベースの座標系からロボットハンドの座標系へのロボットハンドの姿勢によってロボットハンドの座標系における指先合力をロボットハンド装置のベースの座標系における指先合力に変換し、当該ロボットハンド装置のベースの座標系における指先合力の中の鉛直方向の指先合力に基づいて物体の重量を推定し、推定した物体の重量とロボットハンドにおける物体を把持する力との差から物体を置く場所から受ける反力を演算し、ロボットハンドで把持した物体を置くときに、演算した反力が閾値を超えた場合にロボットハンドから物体を離す制御を行うことを特徴とする。
(もっと読む)
ナノピンセット、把持力検出方法およびナノピンセットの駆動装置
【課題】微小な把持力を検出することができるナノピンセット
【解決手段】ナノピンセットに設けられたグリッパ部Gには一対のアーム1,2が設けられており、アーム1を駆動機構3による駆動することにより、アーム1,2間に試料を把持することができる。アーム2側には駆動機構4が設けられており、櫛歯状凹凸部40,41間に働く静電力によりアーム2が振動駆動される。試料を把持する際にはアーム2が振動駆動され、把持時における振動振幅の変化をアドミッタンス変化として検出することにより、把持力を算出する。
(もっと読む)
滑り検出装置、滑り検出方法、及びロボットハンド装置
【課題】簡易な構成で、把持部における滑りを高精度に検出すること。
【解決手段】滑り検出装置1は、対象物体と対象物体を把持する把持部との接触面7aの滑りを検出する。また、滑り検出装置1は、接触面の圧力分布を算出する圧力分布算出手段5aと、圧力分布算出手段5aにより算出された圧力分布に基づいて、圧力分布の中心位置を算出する中心位置算出手段5bと、中心位置算出手段5bにより算出された接触面の中心位置の移動速度を算出する移動速度算出手段5cと、移動速度算出手段5cにより算出された中心位置の移動速度を含む滑り判定関数の値に基づいて、接触面に滑りが発生しているか否かを判定する滑り判定手段5dと、を備えている。
(もっと読む)
ロボットとロボットの制御方法
【課題】 把持する物体の形状等を正確に把握することなく、物体を把持することができるロボットを具現化する。
【解決手段】 物体を把持するロボットであって、少なくとも2本の指を有するハンド部と、各指に少なくとも一つずつ配設されており、各指の所定箇所と把持対象物との接触を検出する接触センサ群と、少なくとも把持対象物の形状を記述する形状情報を入力し、ハンド部が把持対象物を把持したときに接触センサ群が出力する信号群を予測する予測手段と、接触センサ群から出力されている信号群が、予測手段によって予測された信号群に等しくなるように、各指の動作を制御するハンド制御手段とを備える。
(もっと読む)
チャック装置
【課題】被挟持物を安定して挟持できるチャック装置を提供する。
【解決手段】ロボットハンドに取り付けられるチャック装置は、金属で形成される金属フィンガー41aと樹脂で形成される樹脂フィンガー41bとを有するフィンガー部40を備えている。よって、フィンガー部40でワーク91を挟持する場合、金属フィンガー41aは変形しないのに対して、樹脂フィンガー41bは挟持力によって弾性的に曲がる部分BNが生じる。このように樹脂フィンガー41bが弾性変形することによりワーク91をソフトに挟持できるため、金属同士のフィンガーでワークを挟持する場合のようにフィンガーとワークとが点接触とならず、ワーク(被挟持物)を安定して挟持できる。
(もっと読む)
ロボットハンドとロボットハンドによる把持方法
【課題】二つで一組の1指2関節タイプのフィンガーをハンド本体に対し重合方向に二組並べて配置してある多指把持タイプのロボットハンドを前提として、小物部品の把持に際して二つの部品を同時に把持することができるようにする。
【解決手段】一方のフィンガー2A,2Bと残りのフィンガー3A,3Bがそれぞれ別個の部品W2を把持することが可能である。各フィンガー2A,2Bと3A,3Bにてそれぞれ別個の部品W2を把持する際には、一方のフィンガー2A,2Bが部品W2を把持したならば、他方のフィンガー3A,3Bによる把持動作に先行して、部品W2を把持した一方のフィンガー2A,2Bがフィンガー2A,2Bと3A,3Bの重合方向と直交する平面内を残りのフィンガー3A,3Bに対しオフセット状態となるように予め退避動作させる。
(もっと読む)
ロボットハンドとロボットハンドのフィンガー交換装置
【課題】予めモジュール化してあるフィンガーユニットを積極的に脱着交換することで多種多様な部品の把持に対応できるようにした汎用性の高いロボットハンドを提供する。
【解決手段】予めモジュール化してある同種または異種の複数のフィンガーユニット3,4を共通のコモンベース2に着脱可能に装着する。フィンガーユニット3は二指把持タイプのものであって、対向配置した二つのフィンガー5または6を一つのモジュールとしてユニット化したものとし、例えば対向配置した二つのフィンガー5がそれぞれに単一または複数の関節10,11を有した関節型のものや、対向配置した二つのフィンガー6が互いに接近離間可能な直動型のものとする。
(もっと読む)
物体を把持する装置および方法
【課題】 関節を回転すると姿勢が変化する複数の指を備えるロボットハンドを用いて、任意の形状の物体を人間が行うような自然な動作で把持することが可能な技術を提供する。
【解決手段】 本発明の装置は、関節が回転すると姿勢が変化する複数の指を備えるロボットハンドを用いて物体を把持する装置である。その装置は、物体の形状情報を取得する手段と、物体の形状情報から物体の把持に用いる指を選択する手段と、物体の形状情報から物体の把持に用いる指の物体上の把持点の位置を計算する手段と、各関節の目標関節角度を計算する手段と、計算された目標関節角度に応じて各関節を回転させる手段を備えている。その装置は、前記目標関節角度を計算する手段が、物体の把持に用いる指については前記把持点の位置から目標関節角度を計算し、物体の把持に用いない指については指を握り込む姿勢を実現する目標関節角度を設定することを特徴とする。
(もっと読む)
容量タッチパッド技術を用いて、ロボット把持メカニズムに接触感覚を得させるシステム
容量感応タッチパッドにおいて、XおよびY電極格子が、ゲルまたはその他のゴム状物質のような、弾性であるが変形可能な物質によって分離されており、物体がタッチパッドに接触すると、電極格子間にある弾性物質を圧縮させるので、タッチパッドは、電極格子間の距離の変化を判定することができ、これによってタッチパッドに加えられ弾性物質の検出可能な圧縮を生ずる力の量を判定する。 (もっと読む)
ロボットの外被
【課題】柔らかい表皮を備えると共に、その表皮を介して印加される荷重の作用点あるいは荷重分布を確実に検出し、よって外界との接触点を確実に推定できるようにしたロボットの外被を提供する。
【解決手段】ベース50a上に離散的に敷設された複数個の触覚センサ52と、触覚センサの上方に配置されると共に、触覚センサに対向する面に、触覚センサのそれぞれに向けて断面視において縮径された突起50b1が触覚センサのそれぞれを押圧可能に連続的に形成された第1部材50bと、および第1部材の上方に配置されると共に、第1部材より剛性において低い素材からなる第2部材50cとを備える。
(もっと読む)
関節装置、関節装置を用いたフィンガーユニット、及び、ユニバーサルロボットハンド
【課題】人の指のごとき微妙な動作を実現することが可能な関節装置、関節装置を用いたロボットフィンガー、及び、ユニバーサルロボットハンドを提供する。
【解決手段】一方のリンク部材Lに固定したフレクスプライン7と、その回転軸心Pと交差する方向に延出形成した薄肉部8aを他方のリンク部材Lに固定したサーキュラスプライン8とを備えてなるハーモニックドライブHを前記関節部材Jに組み込み、基端側リンク部材Lに収容したモータMの出力を基端側のウェーブジェネレータ6に伝達する第一の伝動機構T1と、前記モータMの出力を前記第一の伝動機構T1及び前記基端側リンク部材Lに隣接するリンク部材Lに収容した伝達シャフトSを介して前記基端側のウェーブジェネレータ6に隣接するウェーブジェネレータ6に伝達する第二の伝動機構T2を備える。
(もっと読む)
把持装置
【課題】把持装置に把持されたワークを所定の位置に位置決めする。
【解決手段】把持装置に設けられた把持パッド28の内部には、弾性体36と球体38とが内部に収容されている。この把持パッド28は、ワークとしてのドアミラー14が挟持されると、弾性体36が撓むことで該ドアミラー14の形状に対応する形状に変形する。そして、把持パッド28の内部から気体が排気されることにより、球体38が位置決め固定される。ドアミラー14が搬送された後、把持パッド28の減圧度が低減され、これにより弾性体36、ひいては把持パッド28が元の状態に復元しようとする。これに追従してドアミラー14が押圧され、該ドアミラー14が所定の位置に位置決めされる。
(もっと読む)
ロボットハンドの把持制御装置
【課題】 指部材によって物体を倒したり、損傷したりする危険性が低く、物体を確実に把持することができるロボットハンドの把持制御装置を提供する。
【解決手段】 ロボットハンドの把持制御装置は、画像認識装置によって把持対象物体の形状を認識し、把持対象物体の形状に基づいて、把持姿勢算出装置によって、ロボットハンドの把持姿勢を算出する。把持姿勢算出装置では、予め定義された複数のモデル形状と、モデル形状に対するロボットハンドの拘束条件から定めた接触条件を記憶しており、認識した把持対象物体Mの形状に対していずれかのモデル形状を割り当て、割り当てたモデル形状と、掌部16および第二指11〜第四指との接触条件を満たす把持姿勢を算出する。
(もっと読む)
溶接教示位置補正システム及びキャリブレーション方法
【課題】教示プログラムを、作業者が手動で事前に修正することなく、簡便に、精度良く補正する。
【解決手段】溶接教示位置補正システム1は、ロボット2と、対向配置された二つの溶接チップ31,32を有するスポット溶接ガン3と、一方の溶接チップ31に交換可能に設けられるとともに、光軸が溶接チップ32の軸と同軸となるように設けられ、溶接チップ32によるワークの打点部を撮像する撮像装置4と、ロボット2及びスポット溶接ガン3の動作制御を行う動作制御手段5と、撮像装置4により撮像された撮像画像の画像処理を行って、撮像画像中における打点部の位置情報を取得する画像処理手段6と、撮像画像中におけるワークの打点部の位置情報に基づいて、教示プログラム53aにおけるロボット2の教示位置を複数の方向に補正するプログラム補正手段5と、を備える。
(もっと読む)
物品把持装置、物品の把持不良の検出方法、及び、把持部材
【課題】ワークが斜めの状態で把持される等の把持不良を検出するための新規な技術を提案する。
【解決手段】物品(ワーク10)を規定の支点2a〜2dで把持するための複数の把持部材(フィンガー2A・2B)を具備し、前記各フィンガー2A・2Bには、前記各支点2a〜2dの温度を検知するためのセンサ3a〜3dが設けられる構成とする。また、前記各センサ3a〜3dにて前記各支点2a〜2dの温度を検知するとともに、図示せぬ制御装置によって、前記各支点2a〜2dにおける温度と規定の閾値とを比較し、前記温度が前記閾値を超えたときに、把持不良を検出するものとする。
(もっと読む)
多関節多指ハンドの把持制御方法
【課題】把持している物体や指に外界から力が慟いても、正しく把持力を発生させて、把持状態を保つことのできる多関節多指ハンドの把持制御方法を提供する。
【解決手段】多関節指ハンドの把持制御方法において、2本ないし4本指の指先で物体を把持するにあたり、把持に用いる把持指の各指先力を力検出手段22で検出し、各指先力について他の把持指に向かうベクトル方向成分を抽出し、各指で抽出された前記成分のベクトル方向が同じものを一対の組とし、その力の組で相殺し合う部分のみを把持力とみなし、把持力とみなした成分を該当する指で合計したものをその指の発生する把持力とする把持力抽出手段23を用い、この把持力抽出手段23で得られた把持力が目標とする把持力24に追従するように力制御もしくはコンプライアンス制御を行う。
(もっと読む)
把持機器を用いて房から一度に1つの個別の毛髪/繊維を除去するための装置
対向する第1及び第2把持要素(5,6)を有する把持機器(4)を用いて、房(3)から一度に1つの個別の毛髪/繊維(2)を除去するための装置(1)。第1及び第2把持要素(5,6)は互いに関して相対的に移動可能であり、第1把持要素(5)は第2把持要素(6)の方を向いたくさび形の溝(7)を有し、また第2把持要素(6)は本質的に平坦な押圧受け領域(8)を有し、その際、第1把持要素(5)はくさび形の溝(7)側で先細になっている(テーパA)。  (もっと読む)
(もっと読む)
ロボットハンド装置
【課題】 滑りの有無を効率的に判断できるロボットハンド装置を提供する。
【解決手段】 物体Wを把持する把持手段2と、該把持手段に設けられ前記物体との接触圧を複数点で検出する接触圧検出手段3と、前記接触圧検出手段の出力に基づいて前記把持手段による前記物体の把持力を制御する制御手段8と、前記把持手段を移動させる移動手段5とを備えて、前記物体を把持して移動させるロボットハンド装置1であって、前記制御手段8が、前記把持手段2の移動方向に基づいて、前記接触圧検出手段が検出する前記接触圧をスキャンする領域を限定する。物体Wが滑り出す領域の接触圧だけを監視するようにしているので、高周波の信号が接触圧検出手段から出力されても短時間で処理して、滑り発生の有無を効率良く判断できる。
(もっと読む)
ロボット装置
【課題】ロボット装置の把持機構の把持方法及び把持力にかかわらず、安定したすべり特性を持つ皮膚部材を設け、操作時の対象物の落下を防止する。
【解決手段】対象物の操作を行う場合、まず2本以上のフィンガ2、3で対象物を把持した状態で、外力を加えることによって各フィンガ2、3間で対象物を移動させる。このためには、移動の回転中心をフィンガの先端部の中央に持ってくることで、対象物がフィンガから離脱して落下することを防ぐことが可能である。例えば、フィンガの先端部に設けられた多層構造の皮膚部材の層間部に同心円状の凹凸形状を設け、皮膚部材のせん断弾性に方向特性を持たせることによって、回転中心がフィンガの先端部の中央に来るようフィンガ表面のすべり特性を設計する。
(もっと読む)
141 - 160 / 181
[ Back to top ]