
Fターム[3C007KX08]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411) | 指、吸着パッドに設けるもの (181)
Fターム[3C007KX08]に分類される特許
81 - 100 / 181
ロボットハンドとこれを用いた対象物の把持方法
【課題】把持部の交換をすることなく、複数種類の対象物を把持でき、対象物の上方に障害物が存在しても、対象物へのアクセスを容易に行えを提供する。
【解決手段】取出位置にある対象物を挟持して別の位置まで搬送する搬送ロボットのロボットハンドであって、種類が異なる第1および第2の対象物2,3をそれぞれ挟持する第1および第2の挟持部5,7を備える。第1および第2の挟持部5、7は、開閉駆動される共通のフレーム9に設けられる。第1の挟持部5は、フレーム9の閉動作により第1の対象物2を挟むように動作し、第2の挟持部7も、フレーム9の閉動作により第2の対象物3を挟むように動作する。
(もっと読む)
ロボットハンド

【課題】1つのアクチュエータを作動させることで複数の対象物を同時に挟持できるロボットハンドを提供する。
【解決手段】第1および第2の対象物2,3をそれぞれ挟持する第1および第2の挟持部5,7を備える。第1および第2の挟持部5,7は、開閉駆動される共通のフレーム9に設けられる。第1および第2の挟持部5、7は、フレーム9の閉動作によりそれぞれ第1および第2の対象物2,3を挟むように動作する。第2の挟持部7は、第2の対象物3を弾性力で挟持する弾性力付与機構11を有し、第1の挟持部5が第1の対象物2を挟持している状態において、第2の対象物3と第2の挟持部7との間で前記弾性力が作用するようになっている。
(もっと読む)
ロボットハンド機構、ロボットハンド機構を備えたロボット及びロボットハンド機構の制御方法
【課題】不特定の硬さを有する対象物に対して、その硬さに応じた最適な把持力及び速度での移動制御を行なうことを実現したロボットハンド機構を提供することを目的とする。
【解決手段】ロボットハンド機構1は1対の指部2a及び2bを備えている。指部2a及び2bの第一節21には、サーボモータ7を介して第二節22が変位可能に連結されている。サーボモータ7にはポテンショメータ8が取り付けられており、第二節22の先端部には力覚センサ9が設けられている。ポテンショメータ8は、第二節22の変位量を制御部6に出力する。力覚センサ9は、第二節22が対象物Oに加える押圧力Fx及び第二節22と対象物Oとの間に生じる摩擦力Fyを制御部6に出力する。制御部6は、ポテンショメータ8及び力覚センサ9からの入力に基づいて対象物Oの硬さを判定し、硬さに基づいて、対象物Oを把持する把持力と対象物Oを移動させる速度とを切り替える。
(もっと読む)
変形性薄物展開装置
【課題】人手で布地等の把持作業が行われる場合、その把持作業を従来よりも簡素化することができ、自動制御で布地等の把持作業が行われる場合、布地等を把持するまでの工程を比較的少なくすることができる展開装置を提供する。
【解決手段】布地の展開装置は、展開機構状態変化機構であるロボット本体と、ロボットハンド2Aを含む。ロボットハンド2Aは、2組のハンド機構21と、それらを接近離反させる第11スライド機構22A、第12スライド機構22Bを含む。ハンド機構21は1対のフィンガ部21Aを有する。布地CLを把持するときは、2組のハンド機構21を接近させフィンガ部の先端が斜め上方又は真横を向く状態とした後にフィンガを閉じて布地を把持し、その後把持したまま第11スライド機構22Aと第12スライド機構22Bによってハンド機構21を離間させる。
(もっと読む)
残留変形性薄物把持装置
【課題】本発明の課題は、布地等が床面等に平らな状態で存在する場合において、布地等にダメージや、汚れ、折り目を残すことなく、高確率で自動的にその布地等を把持することができ、且つ、製造コストをできるだけ低く抑えることができる把持装置を提供することにある。
【解決手段】本発明に係る把持装置1,2は、ハンド部21を第1距離離間させ、下側のフィンガ部21bが布地CL等の縁部に接触する位置(第1位置)まで把持機構2Aを移動させる。次いで、同装置は、ハンド部を第2距離まで接近させる。続いて、同装置は、把持機構を第1位置よりも上後方の位置(第2位置)に移動させ、ハンド部を第3距離まで接近させる。その後、同装置は、フィンガ部21Aが第11距離離間された状態で把持機構を少なくとも第2位置よりも前方の位置に移動させる。そして、同装置は、フィンガ部を第12距離まで接近させる。
(もっと読む)
変形性薄物展開装置
【課題】本発明の課題は、人手で布地等の把持作業が行われる場合、その把持作業を従来よりも簡素化することができ、自動制御で布地等の把持作業が行われる場合、布地等を把持するまでの工程を比較的少なくすることができる展開装置を提供することにある。
【解決手段】本発明に係る展開装置1,2は、展開機構2Aおよび制御装置4を備える。展開機構は、複数のハンド部21および第2接近離間機構22を含む。ハンド部は、一対のフィンガ部21Aおよび第1接近離間機構21Bを有する。第1接近離間機構は、一対のフィンガ部の対抗方向を含む面(以下「第1面」という)に沿って一対のフィンガ部を接近/離間させる。第2接近離間機構は、第1面と直交する方向に沿って同一直線上でハンド部を接近/離間させる。制御装置は、ハンド部を第1距離まで接近させた後、フィンガ部が第11距離まで接近された状態でハンド部を第1距離よりも長い距離離間させる。
(もっと読む)
ロボットハンド用触覚センサー機構及びそのロボットハンド用触覚センサー機構を備えるロボット
【課題】少ないセンサーまたは小さなセンサーで感知領域を広くしたロボットハンド用触覚センサー機構及びそのロボットハンド用触覚センサー機構を備えるロボットを提供する。
【解決手段】ロボットハンド用触覚センサー機構1は、本体部2と、本体部2に接着されたシリコンゴムからなる外皮部3と、本体部2に固定されると共に外皮部3内に収容されたセンサー固定部5と、センサー固定部5に設けられた感圧センサー6とから構成されている。感圧センサー6は、外皮部3の内面3aに接するセンサー素子7と、センサー固定部5に固定された基盤8とから構成されている。外皮部3は、その断面が蛇腹状の形状を有している。外皮部3は、その内面3aのうち、蛇腹形状の谷底部3a1がセンサー素子7に接するように、部分的にセンサー素子7に接している。
(もっと読む)
ロボット、ロボットハンドおよびアタッチメント
【課題】 対象物の把持のための微妙な握力調整や位置決め精度を緩和したロボットハンドおよびアタッチメントを提供する。
【解決手段】 互いに接近および離間することによって開閉する一対の把持フィンガー7を備えており、ロボットハンド部6が保持しようとする対象物には、把持フィンガー7が把持するためのアタッチメント41が取り付けられており、前記一対の把持フィンガー7同士の対向する面7aそれぞれに対向する複数個の係止部材14が突設され、前記アタッチメント41の左右の両外表面それぞれに前記係止部材14が係止する複数個の被係止部41aが形成されている。
(もっと読む)
物体接触面を有するロボットハンド
【課題】対象物と接する物体接触面を有するロボットハンドにおいて、位置推定のための発光手段を不要としてコストを低減する。
【解決手段】ロボットハンドは、対象物170と接する物体接触面P1を有する。物体接触面P1には光センサ140が設けられる。物体接触面P1が対象物に接触すると、物体接触面P1に設けられる光センサ140は対象物170の作用表面171と物体接触面P1とによって周囲を覆われるため、検出される光は弱くなる。これに応じて、制御部160は、物体接触面P1が対象物170に接触していると判定する。
(もっと読む)
ロボットアーム、ロボット及び制御方法
【課題】打楽器の演奏だけでなく他の作業も可能とするロボットアームを提供すること。
【解決手段】本発明の一態様に係るロボットアームは、動作部と、前記動作部が回動自在に連結された支持部と、前記動作部の回動運動を直線運動に変換して、移動部材に伝達する変換機構と、前記移動部材の移動距離を検出する距離センサと、前記距離センサで検出された前記移動部材の移動距離に基づいて、前記動作部の動作を制御する制御部とを備えるものである。
(もっと読む)
ロボット、ロボットハンド及びロボットハンドの制御方法
【課題】 把持しようとする物体の形状及び材質に関係なく、より迅速かつ正確に物体に接近し、安全に物体を把持することができるロボット、ロボットハンド及びロボットハンドの制御方法を提供する。
【解決手段】 手の平と、複数の節を備えて前記手の平に連結される複数の指とを備えるロボットハンドの制御方法において、前記手の平に設置される第1距離センサーを用いて前記手の平を物体に接近させ、前記複数の指に設置される第2距離センサーを用いて前記複数の指を前記物体に接近させ、前記手の平及び前記複数の指を前記物体に接触させて前記物体を把持するロボットハンドの制御方法を構成する。
(もっと読む)
部品把持装置とその方法
【課題】部品を把持したままで、部品の角度や位置を制御でき、且つ迅速な把持力制御が可能であり、部品搭載装置に適用したときには部品認識から部品搭載までを迅速に行う。
【解決手段】部品102を把持する把持手段150と該把持手段150を制御する制御手段180とを有する部品把持装置において、前記把持手段150が、前記部品102を把持するための3つ以上の把持爪172、174、176と、該把持爪172、174、176を駆動する互いに独立した駆動源154、156、158とを備え、且つ、前記制御手段180が、前記把持手段150を制御するための外乱オブザーバ200と、軸ねじれ反力推定オブザーバ202とを備え、前記制御手段180から前記駆動源154、156、158への制御指令により前記把持手段150が共振比制御される。
(もっと読む)
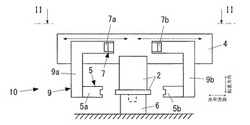
揺動開閉チャック
【課題】把持用フィンガーに対する摺動抵抗が低減して小型のシリンダーを使用してチャック自体を小型化及び軽量化してチャックの高速移動を可能にすると共に狭小空間内に対して容易に進入させることを可能する。偏平なピストンでシリンダーを構成することによりシリンダーの厚さ(高さ)を低減してチャック自体を薄型化すると共に小型化及び軽量化する。
【解決手段】シリンダー部材の非作動時には、各ピストン13a,13bは、弾性部材9の弾性力により付勢されて互いに近づく方向へ揺動する各把持用フィンガー5の作動部5bに当接する押圧部材15a,15bにより互いに近づく方向へ移動される。シリンダー部材11の作動時には、各ピストンは、供給される流体の圧力により押圧部材を互いに遠ざかる方向へ移動して各作動部を、弾性部材の弾性力に抗して押圧し、各把持用フィンガーを把持部5a相互が互いに近づく方向へ揺動させてワークを把持する。
(もっと読む)
揺動開閉チャック
【課題】把持用フィンガーに対する摺動抵抗を低減して耐久性を高めることができる。小型のピストンで高い把持力を得ることができ、チャック自体を小型化することができる。把持用フィンガーを多段動作で開閉することにより高い把持力を得ることができる。
【解決手段】作動部材の作動に伴って移動するカム部材の第1傾斜部を摺接するボール部材により作動部を弾性部材の弾性力に抗して互いに離間する方向へ押圧して把持用フィンガーを、把持部によるワークの把持が可能な位置まで揺動した後に、続いて第2傾斜部を摺接するボール部材により作動部を更に互いに離間する方向へ押圧して把持用フィンガーを、把持部がワークを把持する位置へ揺動する。
(もっと読む)
ロボットシステム
【課題】セル生産方式の製品生産に適用可能なロボットシステムを提供する。
【解決手段】物を掴むための手ユニット123cを有するロボット120と、ロボット120の操作者11の動作を検出する検出部110と、ロボット120の動作を制御するロボット制御部130とを備え、検出部110は、操作者11の手に取り付けられ、該操作者11の手にかかる圧力を検出する第1圧力検出部111を有し、ロボット制御部130は、第1圧力検出部111により検出される圧力と同じ圧力が手ユニット123cにかかる状態で、ロボット120が検出部110により検出された動作と同じ動作を行うよう手ユニット123cの動作を制御する動作指令生成部131を有する。
(もっと読む)
圧力センサおよびロボットハンドシステム
【課題】ロボットハンドなどの表面での複数個所の圧力を堅牢な構造で検出できるようにする。
【解決手段】圧力センサは、可撓性絶縁基板49と、可撓性絶縁基板49の面に沿って互いに間隔をおいて配置された複数の内側電極22と、可撓性絶縁基板49の面に沿って内側電極22の外側に配置された絶縁膜46と、絶縁膜46の面に沿って互いに間隔をおいて内側電極22の外側に配置された複数の外側電極21と、絶縁膜46の外側を覆う弾性体カバー47と、を有する。複数の内側電極22と複数の外側電極21との間のそれぞれの距離が弾性体カバー47の各部に外から加えられた圧力に応じて変化し、それによって、複数の内側電極22それぞれと複数の外側電極21それぞれとの間の静電容量が変化する。
(もっと読む)
把持装置および方法
【課題】把持装置および方法において、把持開口の大きさを正確に設定することができ、安定した把持動作を行うことができるようにする。
【解決手段】把持装置が、把持ユニットに対して動作制御値を送出して把持ユニットの動作を制御する把持機構制御部117と、把持部材によって形成される把持開口の大きさを算出するための画像処理部112と、複数の動作制御値に対して画像処理部112で算出された把持開口の大きさから、動作制御値に対する把持開口の大きさとの関係を表す校正データを生成する校正データ生成部113と、校正データを記憶するデータ記憶部116と、把持ユニットに対する動作制御値データをデータ記憶部116に記憶された校正データに基づいて生成して、把持機構制御部117に送出する装置制御部115とを備える。
(もっと読む)
ピンクランプ装置とロボットアーム
【課題】ワークの位置決め孔とピンの相対位置関係を常に検出することのできるピンクランプ装置を提供する。
【解決手段】ピンクランプ装置は、ベースとピンとカメラを備える。ベースは、ロボットアームの先端に固定される。ピンは、ベースから柱状に伸びている。ピンは、ワークに形成された位置決め孔に挿入されるための部材である。カメラは、ピンに内蔵されている。カメラの光軸がピンの中心線に一致している。カメラは、ピンの先端前方方向を撮影する。光軸がピンの中心線に一致しているため、カメラの画像の中心が常にピンの中心線に沿ったピン前方を表す。ピンの先端をワークの位置決め孔に向ければ、画像の中心に位置決め孔が映し出される。カメラ画像上でワークの位置決め孔がピンの先端によって遮られてしまうことがない。ワークの位置決め孔とピンの相対位置関係を常に検出しながらピンを位置決め孔に挿入することができる。
(もっと読む)
ヒータ兼温度センサ素子と、これを用いた気流センサ及び真空パッド、及び導電膜付チューブ並びに気流検知装置
【課題】温度センサを自己加熱によりヒータとしても動作させる超小型で高速応答の安価なヒータ兼温度センサ素子を提供する、この素子を用いた高速で高感度の気流センサを提供する、この気流センサを真空パッドに適用して高速応答にする。さらに、これらを用いた気流検知装置を提供する。
【解決手段】基板から熱分離したカンチレバ状の薄膜にヒータ兼温度センサを形成し2端子とする。そのチップ寸法を1mm角程度の超小型化する。気流センサとして気流の流入口近傍の微小空間にヒータ兼温度センサ素子を取り付ける。これを真空パッドに適用し、素子を吸着パッド付近に取り付ける。内側と外側に導電膜を形成した導電膜付チューブを提供して電源回路などを有する本体と気流センサとの間の煩雑なワイヤ線を不要にする。更にこの気流センサを用いて、少なくとも増幅回路、演算回路、制御回路を有するコンパクトな気流検知装置とする。
(もっと読む)
ロボットハンド装置
【課題】定格測定値の比較的小さな力センサを用いて指先力を高精度に制御することができ、しかも、指先部の外径や長さを小として繊細な把持動作が可能となるロボットハンド装置を提供する。
【解決手段】複数の関節を介して屈伸する指の指先部3に力センサ12を設ける。力センサ12は、その主軸16が指先部3の先端9と関節6に隣接する指先部3の基端10との間に形成された指先腹部11に向くように傾斜した姿勢で指先部3の基端10と関節6との間に取付けられる。そして、力センサ12の主軸16の延長軸線zは、指の長手方向に延びて指先部3の中心を通る第1の直線aと、指先部3の基端10において第1の直線aに直交して指の屈曲方向側に延びる第2の直線bとの間を通り指先腹部11に向かって延びる。
(もっと読む)
81 - 100 / 181
[ Back to top ]