
Fターム[3C007KX08]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411) | 指、吸着パッドに設けるもの (181)
Fターム[3C007KX08]に分類される特許
121 - 140 / 181
マニピュレータおよびロボット
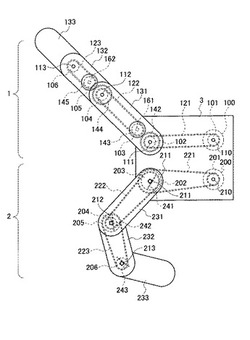
【課題】機構や制御アルゴリズムを単純にしつつも、様々な形状の物体を確実に把持することができるマニピュレータを提供する。
【解決手段】複数の関節軸111,112,113及び複数のリンク131,132,133を有し、複数の関節軸111,112,113の回転角が一定の関係を保つように複数のリンク131,132,133が連動して閉じる方向に動く指1と、指1と対向して配置され、複数の関節軸211,212,213及び複数のリンク211,212,213を有し、複数のリンク231,232,233のうち根元側のリンク231から順に閉じる方向に動き、且つ根元側のリンク231が物体に接触すると、根元側のリンク231に隣り合うリンク232が閉じる方向に動く指2と、指1及び指2を駆動する駆動源100,200を備える。
(もっと読む)
把持精度を改善したマニピュレータロボット用グリッパ、及び少なくとも1つの該グリッパを備えているマニピュレータロボット
本発明の主題は、各部材が第2の長手方向端部でグリップ支持部(8′)及び対象物と接触することを意図した実質的に平坦なグリップ(10′)を備える、第1の端で関節結合した2つの部材と、グリップ(10′)の変位に際し応力を維持するように、少なくとも1つのグリップ支持部(8′)とグリップ(10′)の間に配置された応力センサ(26′)と、グリップ(10′)をグリップ支持部(8′)に連結する変形可能な平行四辺形状の連結部(14′)とを備え、センサの受感軸がグリップ(10′)の面に直交するようにセンサ(26′)が配向されている、マニピュレーティングロボット用グリッパである。  (もっと読む)
(もっと読む)
ピンセット及びこれを備えたマニュピレータシステム

【課題】挟持する力(挟持力)を容易且つ高精度に検出することができると共に、小型化を図ること。
【解決手段】電子顕微鏡観察用の試料を挟持可能なピンセットであって、所定間隔離間して隣接配置され、それぞれ対向する側の先端に試料を挟持する挟持面71a、72aを有する一対の棒状挟持部材71、72を備え、一対の棒状挟持部材が、挟持面の基端側に挟持面と電気的に独立した状態で互いに対向して配された導電部73、74と、これら導電部間の静電容量を測定する静電容量センサ75とを備えていることを特徴とするピンセット70を提供する。
(もっと読む)
ワーク搬送システムおよびワーク搬送方法
【課題】ワークとハンドとの相対位置が一定にならない場合でも、この把持したワークの位置や姿勢を高精度で制御できるワーク搬送システムを提供すること。
【解決手段】組立てシステム1は、ミラー60を把持するハンド121と、このハンド121の位置および姿勢を変化させるアーム122と、把持されたミラー60をセンシングして、このセンシングしたデータを出力する第2のマニピュレータ13と、これらを制御する制御部70と、を備える。制御部70は、ミラー60の搬送経路についてのティーチングデータを予め記憶しておき、センシングデータに基づいて、ミラー60の位置および姿勢を実測データとして生成し、ミラー60の搬送中、ティーチングデータと実測データとを照合してずれ量を算出し、この算出したずれ量に基づいて、ミラー60の位置および姿勢がティーチングデータに略一致するように、アーム122を制御する。
(もっと読む)
肌色モデル生成装置及びプログラム
【課題】被観察者に負担を強いることなく、簡易な画像処理によって、安定して被観察者の肌色モデルを生成することができるようにする。
【解決手段】被観察者と握手をするために所定領域内にロボットアームハンドの手先を移動させ(102)、カメラの視野内に所定領域が入るように、カメラの位置姿勢を制御し(104)、ロボットアームハンドが被観察者と握手していない状態において撮像された画像を取り込む(106)。手先接触センサのセンサ情報に基づいて、被観察者がロボットアームハンドと握手した判定されると(108、110)、ロボットアームハンドが被観察者と握手している状態において撮像された画像を取り込み(112)、ロボット手先画像I1とロボット手先画像I2とを比較して、手先領域を検出し(114)、手先のRGB色情報を検出し(116)、検出された手先のRGB色情報から肌色モデルを生成する(120)。
(もっと読む)
物品吸着装置
【課題】物品吸着装置において、吸着準備を迅速に行うことができる装置を提供する。
【解決手段】本体1に接続され減圧手段2と、減圧手段2に接続させて空気の吸引作用を行う作動室3と、作動室3内の減圧手段2に接続される部位に開口した第1弁孔4と、作動室3内の第1弁孔4と反対側に開口した第2弁孔5と、作動室3内に移動自在に設けられ第1弁孔4と第2弁孔5とに選択的に位置する弁体6と、作動室3内に設けられ弁体6を第2弁孔5に向かって付勢する弾性部材7と、本体1に接続され第2弁孔5の外側に設けて物品を吸着する吸着部材8と、第1弁孔4に設けられ弁体6が当接したときに一部の空気が流通する第1空気漏れ出し手段41と、第2弁孔5に設けられ弁体6が当接したときに一部の空気が流通する第2空気漏れ出し手段51とを備え、作動室3の内壁3aには第2弁孔5側から第1弁孔4側に向かって螺旋状の溝9が設けられている。
(もっと読む)
対象物を認識、回収および再配置する方法および装置
事前に規定されてない寸法特性を有し、支持面(2)上に配置される対象物(1)を認識、回収および再配置する方法は、グリッパ集合体(30)により実行される。前記グリッパ集合体(30)は少なくとも、荷役する対象物(1)に対する長さ方向の動作方向、前記対象物(1)に対して接近/分離する方向、および前記対象物(1)に対して高度を調節する方向に可動である。前記グリッパ集合体(30)はコンピュータ制御の制御装置により制御される。前記方法は、前記制御装置に格納される位置情報に基づいて、前記グリッパ集合体(30)が前記対象物(1)に略設定されて接近する工程を備える、対象物(1)に接近および認識する工程と、前記グリッパ集合体(30)のフィンガ(35、36)のうち少なくとも1個の近傍に配置される定時距離計測手段(50)および前記対象物の奥行を識別し、前記フィンガ(35、36)の先端に配置される、前記対象物(1)の存在を検出するセンサ手段(55)による前記グリッパ集合体(30)の一連の動作により実行される垂直方向の三次元走査により前記対象物(1)の外形を識別する工程と、前記対象物(1)を把持する工程と、前記対象物(1)の持上げおよび移動動作を備える、前記対象物(1)を回収する工程とを備える。 (もっと読む)
把握型ハンド
【課題】それぞれに関節を有する複数の指を備えた把握型ハンドで、3軸や6軸の力覚センサを用いることなく、個々の指に加わる荷重に対応して把握力を制御できるようにする。
【解決手段】把握型ハンド10は、指関節12、指関節を駆動するアクチュエータ14、及び指関節に支持され、アクチュエータの駆動力下で動作するリンク16をそれぞれに有する複数の指機構18と、複数の指機構のそれぞれのアクチュエータを、互いに独立して制御可能な動作制御部20と、複数の指機構のそれぞれの指関節の作動位置を検出する位置検出部22と、複数の指機構の各々に設けられ、指機構に加わる力によりリンクに生ずるひずみを検出するひずみ検出部24とを備える。動作制御部は、位置検出部が検出した指関節の作動位置と、ひずみ検出部が検出したリンクのひずみとに基づき、複数の指機構のアクチュエータを協調制御して、複数の指機構による把握力を調整する。
(もっと読む)
ロボットおよびロボットの制御装置と制御方法
【課題】 物体の表面性状に応じて把持動作を調節できるロボットを具現化する。
【解決手段】 物体を把持するロボットであって、少なくとも2本の指部を有するハンド部と、指部が物体から受ける接触力を測定する接触力測定手段と、指部が物体表面で摺動した際に接触力測定手段によって測定される接触力の振動周波数を測定する周波数測定手段と、周波数測定手段によって測定された振動周波数に基づいて、ハンド部が物体を把持する把持動作を調節する把持動作調節手段を備えている。
(もっと読む)
ワーク吸着装置
【課題】吸着パッド内の圧力状態を確認できるワーク吸着装置を提供する。
【解決手段】吸着パッド10aの鍔部11背面に、ひずみゲージ50を接着した。さらに、カバー体40aのカバー体鍔部41であって、ひずみゲージ50と対向する部位に、挿通孔43を形成すると共に、ひずみゲージ50に接続されたリード線51を該挿通孔43に挿通させた。そして、このリード線51を、出力検知装置58に接続された。この出力検知装置58は、ひずみゲージ50に生じた歪みを検知すると共に、歪みを検知したことを出力する。かかる構成にあって、吸引装置2が非作動で、被吸引空域18が大気圧状態である場合は、吸着パッド10aの鍔部11は所定の原形を維持し、ひずみゲージ50に歪みは生じない。一方、吸引装置2が作動して、被吸引空域18が真空状態となると、ひずみゲージ50が歪み、出力検知装置58が、これを出力する。
(もっと読む)
把持装置と把持力制御方法
【課題】 把持力制御の精度を高め、且つ、把持装置に使用されている超音波モータの寿命の延長を図ることが可能な把持装置と把持力制御方法を提供すること。
【解決手段】 超音波モータと、超音波モータを駆動することによって離接される一対の移動体と、一対の移動体に対して夫々移動可能な状態で取り付けられ被把持物を把持する一対の把持部材と、各移動体と各把持部材の間に介装され把持部材を一方向に付勢する弾性部材と、超音波モータを駆動することによって一対の移動体を移動させて一対の把持部材を接近させることより被把持物を把持する際弾性部材が所定量だけ弾性変形するまで超音波モータを駆動させそれによって所定の把持力を得る制御手段と、を具備したもの。
(もっと読む)
ロボットハンドの指構造、力覚センサ装置及びロボットハンド
【課題】ロボットハンドの指先部の指腹面に作用する外力を多軸力センサによって精度よく検出する。
【解決手段】ロボットハンドの指先部10は、柱状の力伝達体53に作用する力又はモーメントを検出する多軸力センサ5と、表面が力伝達体53の中心軸(z軸)と略垂直となる向きに配置され、力伝達体53を指向していない側の表面を指腹面とする膜部材1と、表面がz軸と略垂直かつ膜部材1の表面と略平行となる向きで、膜部材1と力伝達体53との間に位置し、z軸に平行な方向にのみ変位可能に配置された板状のz軸力伝達板3とを備え、z軸に平行な外力が指腹面に作用する場合に、膜部材1に押されるz軸力伝達板3によって力伝達体53が押圧されるよう構成されている。
(もっと読む)
ヒューマンロボットインタラクション用の触覚検知装置および方法
【課題】触覚検知モジュールを利用して、接触パターンを判断し、低コストかつ多元化された人とのインタラクション反応を発生させる触覚検知装置および方法を提供する。
【解決手段】ヒューマンロボットインタラクション用の触覚検知装置は、接触インターフェースと、前記接触インターフェースに接続され、外界との外力接触を検知して、前記外力接触に対応する一連のタイミングデータを発生させる触覚検知モジュールと、前記触覚検知モジュールに接続され、前記した一連のタイミングデータを受信するとともに、幾何演算に基づいて、接触パターンを計算かつ判断し、制御信号を発生させるコントローラーと、前記コントローラーに接続されるとともに、前記制御信号に基づいて、前記接触パターンに対応するインタラクション反応を発生させるアクチュエーターとを含む。
(もっと読む)
ロボットハンドおよびロボット
【課題】補助的な指機構を用いることなく、複数の指機構から物体に作用する力を調節しながら、物体の持ち替えが可能なロボットハンド等を提供する。
【解決手段】ロボットハンド1によれば、複数の指機構11〜13のうち一部の指機構13から物体wに作用する力F3が変更されるとき、物体wにおける各指機構11〜13の「接点」ならびに各指機構11〜13から物体wへの「作用力ベクトル」が「安定把持条件」を満たすように各指機構の動作が制御される。「安定把持条件」は(1)複数の指機構11〜13から物体wに作用する力およびモーメントのそれぞれの和が0になり、かつ(2)スリップ指数frが最小になるという条件である。
(もっと読む)
ピックアップ装置
【課題】保持体に小片ワークが保持されているか否かを安定して精度よく検出することができるピックアップ装置を提供する。
【解決手段】チップ状の小片ワークWを保持体1にて保持してピックアップ位置から所定の供給位置まで搬送するピックアップ装置である。保持体1を介して検出光を照射して、小片ワークWにてこの検出光が遮光されたか否かで保持体1の小片ワーク保持の有無を判断する判断手段15を備える。検出光の波長を小片ワークWに対して照射される外乱光と相違させる。外乱光を遮光するフィルタ25を設けた。
(もっと読む)
ロボットおよびその表面計測方法
【課題】ロボットハンドに付着した汚れを効率的かつ確実に検出して、汚れによる作業対象物の汚染や破損、および落下を防いで作業対象物を安全に把持することができるロボットを提供する。
【解決手段】作業対象物に対する接触部3aの接触状態を計測する計測装置4を有する複数の把持部3と、計測装置4で計測した接触状態の情報を分析して汚れを検出する汚れ検出装置5とを備え、汚れ検出装置5において、複数の把持部3同士を接触させて相対運動させる際の接触状態の変化により、把持部3の汚れを検出する。これにより、新たに外部の汚れ検出センサを搭載したり、検出ポジションを設けて移動したりすることなく、把持部3の汚れを効率的かつ確実に検出できる。
(もっと読む)
制振制御機能を持ったロボットハンド
【課題】ロボットハンドの撓み及び振動を大幅に低減し、ガラス基板が更に大型化しても、高い基板収納効率、及び安定した搬送性を確保する制振制御機能を持ったロボットハンドを提供する。
【解決手段】ロボットハンド3の上下面に一対の圧電素子アクチュエーター4が、長さ方向に等間隔に複数対設けられ、ロボットハンドの撓み変位量又は/及び振動を圧電素子アクチュエーターの出力電圧変化として検出するモニタリング手段、検出した出力電圧変化と逆位相の電圧を圧電素子アクチュエーターへ印可するフィードバック手段を具備すること。
(もっと読む)
滑り検出装置、滑り検出方法および滑り検出プログラム
【課題】簡易な構成で、把持部における滑りを高精度に検出すること。
【解決手段】対象物体と対象物体を把持する把持部との接触面の滑りを検出する滑り検出装置1は、接触面における圧力を検出する圧力検出手段3と、圧力検出手段3により検出された接触面の圧力に基づいて、接触面の圧力の中心位置Ocを算出する中心位置算出手段5aと、中心位置算出手段5aにより算出された圧力の中心位置Ocの変化量を算出する変化量算出手段5bと、把持部の把持力を算出する把持力算出手段5cと、変化量算出手段5bにより算出された圧力の中心位置Ocの変化量と、把持力算出手段5cにより算出された把持部の把持力と、に基づいて、接触面に滑りが発生しているか否かを判定する滑り判定手段5dと、を備えている。
(もっと読む)
基板移載ロボット
【課題】基板の位置決めの際に、基板に生じる傷を軽減できる基板移載ロボットを提供すること。
【解決手段】基板が載置されるハンドユニットと、前記ハンドユニット上に載置された前記基板の位置決めを行なう位置決め手段と、を備えた基板移載ロボットにおいて、前記ハンドユニットが、ハンド本体部と、前記ハンド本体部から上方へ突出し、前記基板が載置される複数の載置部材と、を備え、各々の前記載置部材は、その上端において回転自在に支持されて自由回転する回転体を有することを特徴とする。
(もっと読む)
触覚センサ、触覚センサの製造方法および触覚センサユニット
【課題】外圧の大きさおよび方向を高感度で検出することができるとともに製造が容易な触覚センサ、およびその製造方法ならびに触覚センサユニットを提供することである。
【解決手段】触覚センサ100は、カンチレバーCLおよびエラストマー層105を有する。カンチレバーCLは、ノンドープ層103aおよびドープ層103bを有する。ドープ層103bの格子定数はノンドープ層103aの格子定数より小さい。これにより、カンチレバーCLは湾曲している。ドープ層103bは、結晶シリコン膜にホウ素を添加することにより形成されている。エラストマー層105に外圧が加わることにより、カンチレバーCLが変形する。カンチレバーCLが変形することにより、ドープ層103bのピエゾ抵抗が変化する。したがって、ドープ層103bのピエゾ抵抗の変化を検出することにより、触覚センサ100に作用する外圧の大きさおよび方向を検出することができる。
(もっと読む)
121 - 140 / 181
[ Back to top ]