
Fターム[3C007LU02]の内容
マニピュレータ、ロボット (46,145) | 速度、力、ハイブリッド制御 (451) | 速度制御 (170) | 加速度制御 (78)
Fターム[3C007LU02]に分類される特許
61 - 78 / 78
移動性能試験装置

【課題】試験装置の動作をロボットの動作に調和させながら当該ロボットの移動性能を試験しうる装置を提供する。
【解決手段】本発明の移動性能試験装置1によれば、ロボット動作計画に基づいてモータ動作計画が作成され、当該モータ動作計画にしたがってモータ12の動作が駆動される。これにより、エンドレスベルト11の駆動速度変化パターンが、当該エンドレスベルト11の上で移動性能が試験されているロボット2の移動速度変化パターンに応じて制御されうる。そして、エンドレスベルト11の動きのテンポがロボット2の動きのテンポに歩み寄るように、両者の動きのテンポの調和が図られ、この状態で当該ロボット2の移動性能が安定に試験されうる。
(もっと読む)
ロボット装置及びその制御方法

【課題】高い作業効率を確保しつつ、作業の安全性を向上させることができるロボット装置及びその制御方法を提供する。
【解決手段】撮像手段101によって順次撮像される複数の画像を用いて、可動部領域が移動する範囲を予測することにより、可動部領域の移動予測範囲を生成し、移動予測範囲の中から移動体の検出を試みる移動体検出手段203と、移動体検出手段203によって移動体が検出された場合には、可動部103の動作を変化させる制御手段204とを備える。
(もっと読む)
双腕作業機械
【課題】左右の作業フロントの干渉による作業フロントの破損を防止することができる双腕作業機械を提供する。
【解決手段】運転室4を備えた上部旋回体3の前部に設けた左右のスイングポスト7a,bに、それぞれ上下に揺動自在に左右の作業フロントA,Bを設けた双腕作業機械において、作業フロントA,Bの角度差及び操作装置からの指令信号に基づき、スイングポスト7a,bを旋回動作させる出力信号を生成する干渉防止制御部を備え、この干渉防止制御部は、作業フロントA,Bが接触し得る角度差の範囲を干渉危険領域、この干渉危険領域に連続する設定の角度差の範囲を準干渉危険領域と定義した場合、作業フロントA,Bの角度差が準干渉危険領域にあって作業フロントA,Bが相対的に近付くとき、スイングポスト7a,bを旋回動作させる出力信号を減少させ他方の作業フロントに向かって旋回する作業フロントの旋回動作を減速させる。
(もっと読む)
多関節ロボットの制御装置及びその制御方法
【課題】 ロボットの各軸に許容トルクを超える動作が生じることを回避、抑制する。
【解決手段】 ツール15を保持するロボット10の制御装置20であって、ツールによる各関節のトルク負荷に関するツール情報を記憶するツール情報記憶手段26と、ツール情報を取得するとツール情報記憶部の内容を更新するツール情報取得手段34と、記憶されたツール情報に基づいて多関節ロボットの各関節駆動源16の加速度又は速度制御を行う動作制御手段32,33とを備え、ツール情報記憶手段は、ツール情報の初期情報として、所定の過大トルク負荷を生じさせる内容設定がされている。このため、未知のツールが装備されても、過大トルクが想定された動作制御が行われる。
(もっと読む)
ロボットの作動パラメータを調整する方法と装置、その方法のプログラムと記録媒体
【課題】
1)現方法を使用して得られた周期時間より僅かに長い周期時間を得るために作動温度を調整するけれども、限界値以下である作動温度を備えて;そして
2)僅かに限界値以上である作動温度で作動することを必要としても、現方法を使用して得られた周期時間より著しく短い周期時間を得るために作動温度を調整することを達成するようにするためにロボットの作動パラメータを調整する方法を提供すること。
【解決手段】
最適周期時間にて所定通路に沿って作動体工具を移動させる作動パラメータを調整するこの方法は、周期時間がその最適値に近似させるよう作動パラメータ値を修正する工程(140)から成る。この工程中に、作動パラメータの値は中継関数の極値に近似させて、この中継関数は少なくとも第一と第二タームから成り、第一タームが周期時間の関数であり、第二タームが温度及び摩耗程度又はそのいずれか一方の関数である。
(もっと読む)
姿勢認識装置及び自律ロボット
【課題】自由に移動できる移動体に搭載した場合でも高速で信頼性の高い姿勢認識を行うことができる姿勢認識装置を提供する。
【解決手段】姿勢認識装置は、画像から人間の輪郭を抽出する輪郭抽出手段と、輪郭の重心位置に基づいて頭頂点の探索領域を設定し、頭頂点探索領域内の輪郭の最上端から頭頂点位置を求める頭頂点抽出手段と、画像から色情報を抽出し所定の色を持つ領域を抽出する色領域抽出手段と、頭頂点位置に基づいて手探索領域を設定し、手探索領域内の前記所定の色を持つ領域の平均距離と人間候補の輪郭全体の平均距離との差が所定の範囲内である手探索領域内の所定の色を持つ領域を人間の手の領域とし、手の領域に基づいて手先位置を抽出する手位置抽出手段と、抽出された手先位置と頭頂点位置との相対的位置に対応する指示を判定して、この判定結果を姿勢認識結果とする姿勢判定手段を備える。
(もっと読む)
搬送ロボット及び搬送プログラム
【課題】物体の重さに応じて搬送する物体の持ち方を変更することが可能な搬送ロボットを提供する。
【解決手段】搬送する物体8を持ち上げる複数の腕部12と、腕部12が持ち上げた物体を搬送する搬送手段14と、物体の搬送条件情報を取得する搬送条件情報取得手段16と、取得した物体8の搬送情報に応じて腕部12を用いた物体8の持上方法、又は持ち上げに用いる腕部12を選択する持上方法選択手段18と、持上方法選択手段18が選択した持上方法による物体8の持ち上げを腕部12に指令し、持ち上げた物体8の搬送を搬送手段14に指令する制御手段900と備えた。
(もっと読む)
速度制御方法及び速度制御装置
【課題】物体の通過する軌跡上の各点における曲率に応じた速度で物体を移動させる速度制御方法の提供。
【解決手段】軌跡の座標データを入力、軌跡上の各点における曲率を計算、算出された各点での曲率から各点での物体の速度を(1)式に示される角速度を用いた(2)式にて計算、算出された各点での速度を物体に出力。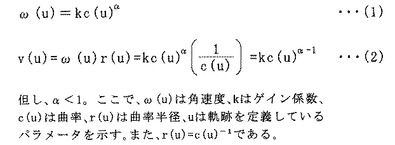 (もっと読む)
(もっと読む)
ディスプレイを備えたロボット
【課題】ロボットの動作状態を人に違和感なく感覚的に伝えることができるようにする。
【解決手段】ロボットに取り付けた温度センサ2で検出した温度により、ロボットの動作速度や加速度の動作パターンを自動的に変化させ、動作パターンの補正量の大きさに応じてディスプレイ6の背景色を段階的に変化させる。また、動作コマンドなど人に直接的に伝える必要があるものは、背景色の前面に表示させる。
(もっと読む)
成形品取出機のチャック制振方法
【課題】チャックの移動停止時に、少なくともチャックの振動周期及び振幅を検出し、該データに基づいてチャックの移動を制御することによりチャックの移動停止時における振動を確実に制振する。検出された振幅データに基づいて移動停止時におけるチャックの振動強度を確認する。
【解決手段】少なくともチャック17の移動停止時に振動検出器25からの信号に基づいてチャック17の振動周期及び振幅を検出してチャックの移動制御手段19に出力し、検出されたチャック振動の周期データ及び振幅データに基づいてチャック17を移動制御してチャック移動停止時における振動を制振すると共に振幅データにより振動強度を確認可能にする。
(もっと読む)
ロボット用停止装置
【課題】ロボットの相対動作部分の停止距離を短くすることができるロボット用停止装置を提供する。
【解決手段】互いに相対運動する一対の相対動作部分2,3の少なくとも一方に設けられ、前記一対の相対動作部分2,3が衝突したときに一対の相対動作部分2,3の間に挟まれて相対運動を停止させるストッパ部材8を備えたロボット用停止装置において、ストッパ部材8は、硬度が異なる2種類の部材が相互に固着された組合せ部材であり、個々の部材の両端面は、一対の相対動作部分2,3のそれぞれに直に接触し、一対の相対動作部分2,3の衝突時の圧縮荷重を両端面で略垂直に受けるように組み合わされている。
(もっと読む)
物品受渡装置
【課題】 搬送面上に形成された物品受容部に物品を載置して搬送するコンベヤと、前記物品受容部に対してトラッキング動作しながら該物品受容部との間で前記物品の授受を行なう物品保持機と、を具備する物品受渡装置に於いて、異常が発生した際の急停止時にコンベヤと物品保持機の同期が崩れるのを防止する。
【解決手段】 前記トラッキング動作中に前記コンベヤ及び前記物品保持機を急停止させるときには、前記物品保持機の前記トラッキング動作を中断し、物品保持状態で減速可能な値として予め設定さている物品保持機の設定減速度、又は、コンベヤの設定減速度うち、小さい方の設定減速度を用いてコンベヤ及び物品保持機を停止させる。
(もっと読む)
ネットワーク基盤のロボット制御システム及びネットワーク基盤のロボット制御システムにおけるロボット速度の制御方法
【課題】ネットワーク基盤のロボット制御システム及びネットワーク基盤のロボット制御システムにおけるロボット速度の制御方法を提供すること。
【解決手段】クライアントが上記ロボットにより撮影された映像データフレームの受信状態に応じてロボットの制御速度を計算し、計算されたロボットの制御速度を含むロボット制御メッセージを生成してロボットに送ることで、ロボットに、ロボット制御メッセージに含まれているロボット制御速度に応じて速度を変更させる。これにより、クライアントの映像データの受信状態に応じてロボットの速度を制御することから、ユーザーにクライアントの性能とは無関係に円滑にロボットの制御を行わせる。
(もっと読む)
産業用ロボット制御装置
【課題】 溶接トーチの停止時における残留振動を、アームの質量や溶接ロボットの姿勢に影響されずに可能な限り抑えることのできる産業用ロボット制御装置を提供する。
【解決手段】 本発明の溶接ロボット制御装置20は、アームを減速させるとき、下式が成立するように各関節の減速度を制御する減速制御手段を備える。
上式において、「Deci」は各関節の減速度[rad/sec2]、「Wvamp」は溶接トーチの許容最大振動幅[mm]、「Li」は溶接トーチの先端と各関節の回転中心軸との距離[mm]、「Ki」は減速機のばね定数[N/rad]、「Ii」は各関節における慣性モーメント[kg・m2]をそれぞれ示す。
(もっと読む)
全方向移動ロボット
【課題】装備が簡素であり、初期位置および姿勢から目標位置および目標姿勢に向かう動作が自然な印象を与える全方向移動ロボットを提供する。
【解決手段】
全方向移動ロボット1が指令された目標位置Bおよび目標ロボット前面方向8bに移動する際に、初期位置A付近にて全方向移動ロボット1を目標位置Bへ並進させながら、ロボット前面が初期位置Aから目標位置Bへ向かうベクトルと同一方向に向くように回転させ、目標位置B付近にて全方向移動ロボット1を目標位置Bへ並進させながら、ロボット前面が目標ロボット前面方向8bと同一方向に向くよう回転させる。
(もっと読む)
ロボット制御装置およびその制御方法
【課題】 高い計算能力を要せず簡単な計算で精度よく、姿勢に応じた最大加速度を求めて、低コストにロボット動作の高速化をはかる。
【解決手段】 ロボットアーム5の現在位置と目標位置から姿勢算出部7で各位置での姿勢を求め、その姿勢情報から、許容最大加速度算出部8において、アームの各回転軸廻りの慣性項およびアームの加速方向を加味した重力項を求め、これらに所定の係数を乗算して和算し、さらにさらにこれとロボットアーム5の最大負荷姿勢時の許容最大加速度とを乗算した値を、最大負荷姿勢時の許容最大加速度に付加して、現在位置と目標位置での許容最大加速度を算出する。
(もっと読む)
工業用ロボット
【課題】 マニピュレータと補助装置を同時に動作させる工業用ロボットにおいて、ワーク上の指定された経路に対してツールを高精度で移動させる。
【解決手段】 制御装置13が備える平滑化手段(S9)は、ポジショナ装置経路方程式(Jp(t))により規定されるポジショナ12の位置及び姿勢Jpを限界加減速度Apを下回るように平滑化し、平滑化位置姿勢Jp_smoothを算出する。制御装置13は、平滑化位置姿勢Jp_smoothを使用して算出した関節角度Jmをマニピュレータ11に指令として出力し、平滑化位置姿勢Jp_smoothをポジショナ12に指令として出力する。
(もっと読む)
ロボットとその位置決めの方法
本発明は、ロボットと該ロボットの位置決め方法に関する。本発明の目的は、ピック・アンド・プレース作業を迅速に、エネルギー的に有利に行うことの出来るロボットの提供である。この目的のために、本質的に、水平に配置されたロボット・アーム(24,26)がその両端で、小寸法の回転ピン(30)で接続され、これにより、アーム(24)の第2の端部は、回転駆動装置(22)に回転自在に接続される。アーム(26)の第2の端部は、効果器(28)を有している。回転駆動装置(22)に接続された回転ピン(20)は、回転自在に設けられまた他の回転駆動装置(16)を有する機体(18)に接続されている。これにより、両回転ピン(10,20)は、互いに距離を置く形で位置している。  (もっと読む)
(もっと読む)
61 - 78 / 78
[ Back to top ]