
Fターム[3C007LV06]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | エンドエフェクターの制御 (521) | 把持の制御 (337)
Fターム[3C007LV06]の下位に属するFターム
把持位置の決定 (62)
把持の安定性の判断を行うもの (23)
複数段階により把持を行うもの (39)
把持力の制御 (107)
Fターム[3C007LV06]に分類される特許
101 - 106 / 106
把持物体の位置、姿勢修正方法

【課題】多指ハンドや把持物体の詳細な幾何情報を必要とせず、計算処理の少ない、把持物体の位置・姿勢補償方法を提供する。
【解決手段】物体の把持が完了すると、ハンド制御部25は補正用データ収集動作を開始する。物体を初期位置から予め与えられた代表点へそれぞれ移動させ、物体の位置姿勢のずれを計測し、そのずれを補正するように各指の制御位置の修正値を指先位置入力用インタフェ−ス26を用いて入力する。ハンド制御部25は入力された指制御位置の修正値を指先位置補正値計算部27へ保存する。全ての代表点についての指制御点の位置の修正値を入力した時点で収集動作を終了する。実際に物体を移動させる作業を行う際に、この補正用データを用いて指先位置補正計算部27で移動後の各指制御点の位置の補正値を予め計算し、ハンド制御部25で移動のための各指制御点の位置にこの補正値を加えることにより移動後の把持物体の位置姿勢を補正する。
(もっと読む)
把握型ハンド

【課題】 それぞれに関節を有する複数の指を備えた把握型ハンドで、3軸や6軸の力覚センサを用いることなく、個々の指に加わる荷重に対応して把握力を制御できるようにする。
【解決手段】 把握型ハンド10は、指関節12、指関節を駆動するアクチュエータ14、及び指関節に支持され、アクチュエータの駆動力下で動作するリンク16をそれぞれに有する複数の指機構18と、複数の指機構のそれぞれのアクチュエータを、互いに独立して制御可能な動作制御部20と、複数の指機構のそれぞれの指関節の作動位置を検出する位置検出部22と、複数の指機構の各々に設けられ、指機構に加わる力によりリンクに生ずるひずみを検出するひずみ検出部24とを備える。動作制御部は、位置検出部が検出した指関節の作動位置と、ひずみ検出部が検出したリンクのひずみとに基づき、複数の指機構のアクチュエータを協調制御して、複数の指機構による把握力を調整する。
(もっと読む)
ガラス搬送装置およびその使用方法
ガラス搬送装置および方法であって、ガラスシートがガラス製造設備内のある地点から別の地点へと移動される際に、ガラスシートの振動を最小限に抑えるようにガラスシートと係合しそれを保持するための強化ロボットが使用される、ガラス搬送装置および方法が本明細書に記載されている。強化ロボットは、1つ以上の吸着カップおよび1つ以上の空気力学式装置を使用することによって、ガラスシートと係合しそれを保持する。吸着カップは、ガラスシートが移動される際に、ガラスシートの外側縁部または非品質領域と接触してそれを支持する。また、空気力学式装置は、ガラスシートが移動される際に、ガラスシートと接触せずに空気力学式装置がガラスシートの品質領域を支持および保持できるように、ガラスシートの中央部分または品質領域に向かってガスを放出する。該装置はまた、空気力学式装置から放出されるガスの温度がガラスシートの温度と実質的に一致するように、空気力学式装置からガラスシートに向かって放出されるガスの温度を調節するための温度制御装置を使用してもよい。 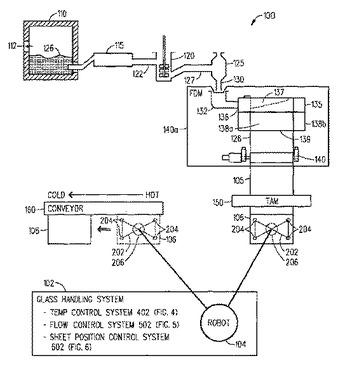 (もっと読む)
(もっと読む)
計測システムおよび計測方法並びに把持装置制御システム
【課題】 既存の分布型圧力センサにより得られた計測対象物と押圧部との圧力分布の情報を基に、計測対象物の特性を測定可能な計測システムを提供する。
【解決手段】 計測システム100は、押圧部10に所定押圧により計測対象物30を接触させる際に、前記計測対象物30と前記押圧部10との間に発生する圧力に対応する信号を測定する圧力センサ20と、前記圧力センサ20から出力された前記信号に基づき前記計測対象物30の前記押圧部10に対する圧力分布を取得する制御装置16とを備え、前記制御装置16は、前記計測対象物30の前記押圧部10への接触開始時点から複数の異なる経過時における前記圧力分布を測定して、前記経過時に対応する各圧力分布からなる圧力分布群を取得する一方、前記圧力分布群に基づき前記計測対象物30の特性を測定する。
(もっと読む)
移載装置
【課題】 ウエハ等の脆質性を備えた板状体を吸着する支持プレートの平行度を高精度に保ってウエハの損傷原因を回避できる移載装置を提供すること。
【解決手段】 半導体ウエハWの支持面20Aを備えた支持プレート11と、これを支持するアームプレート30と、これら支持プレート及びアームプレート13との間に設けられた平行度調整手段14とを備えて移載装置10が構成されている。支持プレートは、支持面から空気の吸排が可能に設けられ、空気吐出状態で半導体ウエハWに接近したときの反作用でウエハに対して平行に保たれ、当該平行を保った状態でウエハに接した後に当該ウエハを吸着して移載することができる。
(もっと読む)
ロボット装置及びその制御方法
【課題】
エンターテインメント性や有用性を向上させ得るロボット装置の制御方法を提案する。
【解決手段】
可動部を駆動する動力源としてのモータの回転を、実行すべき行動内容に応じて制御すると共に、当該モータの回転状態を検出し、検出したモータの回転状態に基づいて、可動部に作用する外力の大きさを推定し、外力の大きさの推定結果に基づいて、外力の大きさと、当該外力によるモータの回転状態の変位量とが予め設定された調整ゲインを比例定数とする比例関係となるように、モータの回転を制御し、状況に応じて、制御手段に設定された調整ゲインを変更するようにした。
(もっと読む)
101 - 106 / 106
[ Back to top ]