
Fターム[3C007LV10]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | エンドエフェクターの制御 (521) | 把持の制御 (337) | 把持力の制御 (107)
Fターム[3C007LV10]に分類される特許
1 - 20 / 107
超音波センサー、触覚センサー、および把持装置
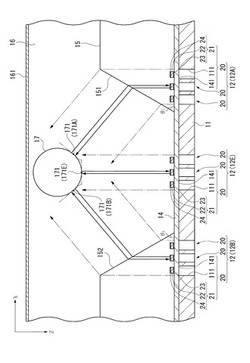
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜16と、弾性膜16の内部に設けられ、弾性膜16が弾性変形すると、その変形に応じて位置が移動する超音波反射体17と、複数の超音波素子20をアレイ状に配列したアレイ構造を有し、基板11の表面に対して直交する方向に平面波として伝搬する超音波を発信する超音波アレイ12と、基板11上に設けられ、超音波アレイ12から発信された超音波を、超音波反射体17に向かう方向に屈折させる音響レンズ15と、各超音波アレイ12の超音波の発信および受信を制御する制御部と、を備えた。
(もっと読む)
把持機

【課題】形状の異なる多品種のワークを把持可能である汎用性の高い把持機を提供することを目的とする。
【解決手段】アクチュエータにより指部を開閉してワークを把持する把持機である汎用ハンド50であって、前記アクチュエータは、当該アクチュエータ自体を前記指部の開閉方向に揺動自在にフローティング支持するフローティング機構を有する。また、3つの前記アクチュエータである電動チャック8、16、24を備え、そのうち2つの電動チャック16、24は、それぞれ一対の指部を有するとともに各一対の指部の開閉方向が平行になるように配置され、残る1つの電動チャック8は、前記2つの電動チャック16、24が有する前記各一対の指部の開閉方向に対して直交する方向に、前記2つの電動チャック16、24を開閉することで、前記2つの電動チャック16、24が有する前記各一対の指部を前記直交する方向に開閉する。
(もっと読む)
物品搬送装置
【課題】ファンを用いて物品を搬送する物品搬送装置において、物品に関わる検出器を可及的に減らせるようにする。
【解決手段】移載装置1、非接触でガラス基板を搬送する装置である。移載装置は、ケース22と、ファン24と、吹き出し口28と、電流値測定部と、ファン制御部30と、を備えている。ケース22は、ガラス基板に対向する物品対向部42を有している。ファン24は、ファンケース54の内部に設けられている。吹き出し部は、物品対向部42に設けられ、ファン24との間で空気を流す。電流値測定部は、ファン24の負荷を検出する。ファン制御部30は、電流値測定部の検出結果によりファン24を制御する。
(もっと読む)
触覚センサ、把持装置、及びアクチュエータシステム
【課題】構造が簡素な触覚センサ等を提供する。
【解決手段】触覚センサ70は、第1電極73aと第3電極73cとの間の第1静電容量と、第2電極73bと第3電極73cとの間の第2静電容量と、に基づいて、受圧部72に加わった押付力(X軸方向の力)又は押付力によって生じる把持力(Y軸方向の力)を検出する。これにより、3つの電極のみで、押付力、把持力等の力を検出することが可能になる。そのため、構造が簡素な触覚センサ70、この触覚センサ70を備えた把持装置及びアクチュエータシステムを提供することができる。
(もっと読む)
ロボットハンドの制御装置、制御方法、及び制御用プログラム
【課題】ロボットハンドの指先における物体の接触を確実に検出すると共に物体の物性を推定し、当該物性に適合した危険回避制御を実現する。
【解決手段】第1指関節に対するトルク指令によるトルク値から第1指リンクの重量及び慣性力に抗するためのトルク値を減算した第1指関節接触トルクと、第2指関節に対するトルク指令によるトルク値から第2指関節より先端側の部分の重量及び慣性力に抗するためのトルク値を減算した第2指関節接触トルクとに基づいて、前記第1指リンクの指先と物体との接触を検出する。指先が物体に接触していると判定された場合には、物体のヤング率を推定し、指先が物体と接触する際の制御剛性が物体の剛性を超えないように第1及び第2指関節に対するゲインを調整する。
(もっと読む)
ロボットの駆動装置、ロボットの駆動方法、およびロボット
【課題】多関節の指部を備えたロボットを簡単な制御で駆動する。
【解決手段】対向して設けられた複数本の指部を用いて対象物を把持するに先立って、複
数の関節を備えた指部の形状を、対象物に応じて定められた把持形状に変形しておく。そ
して、指部の形状を把持形状に保持したまま、対向して設けられた複数本の指部を用いて
、対象物を把持する動作を行う。こうすれば、対象物が変更された場合でも、新たな対象
物に応じた把持形状に指部を変形させるだけで、迅速に且つ適切に対象物を把持すること
ができる。しかも把持動作は、グリッパー型のロボットと同様に簡単な制御で実現するこ
とが可能となる。
(もっと読む)
ロボット装置およびロボット装置による把持方法
【課題】対象物の位置情報に誤差が含まれる場合にも、確実に対象物を把持することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられ、力制御を行うための力センサ21a、22aおよび23aを有する多指ハンド部20と、視覚センサ30による検出により、把持対象物110の少なくとも位置情報を取得する画像処理部43と、画像処理部43により取得した把持対象物110の少なくとも位置情報に基づいてロボットアーム10を移動させて把持対象物110に多指ハンド部20を近づけていき、多指ハンド部20の力センサ21a、22aおよび23aの出力に基づいて把持対象物110に対する実際の接触位置を検出し、検出した接触位置の情報に基づいて把持対象物110の位置情報を修正する制御装置40とを備える。
(もっと読む)
支持装置および支持方法ならびに搬送装置および搬送方法
【課題】支持姿勢や搬送動作にかかわらず板状部材の撓みを抑制できる支持装置および支持方法ならびに搬送装置および搬送方法を提供すること。
【解決手段】接着シートMSが貼付された板状部材Wの搬送装置1は、接着シートMSを介して板状部材Wを保持する保持手段2と、保持手段2で保持された板状部材Wを付勢して板状部材Wの面位置を所定位置に維持する面位置維持手段6と、保持手段2を移動させる移動手段3とを備え、面位置維持手段6は、板状部材Wを一方側に付勢するかまたは他方側に付勢することで、板状部材Wの支持姿勢や搬送動作にかかわらず板状部材Wの面位置を維持することができる。
(もっと読む)
ワークの把持方法
【課題】バラ積み状態のワークを多フィンガのハンドで把持する場合に他のワークが対象ワークの上に重なっている状態であっても、ワークの把持を可能にし、ワークの把持成功率を向上させるワークの把持方法を提供する。
【解決手段】2つの把持装置(第1乃至第4フィンガF1乃至F4)を用いてワーク(リンフォースメントW)を把持するとき、把持しようとする把持対象ワーク(把持対象リンフォースメントT)に対して把持装置を挿入する一方の把持装置挿入箇所(領域A)に他のワークとの干渉がない状態で、一方の把持装置挿入箇所に第1の把持装置(第1フィンガF1及び第2フィンガF2)を挿入して把持対象ワークを把持して持ち上げる片持ち把持工程と、第1の把持装置によって持ち上げられた把持対象ワークのまわり(領域D)に第2の把持装置(第3フィンガF3及び第4フィンガF4)を挿入して把持する両持ち把持工程と、を含むワークの把持方法。
(もっと読む)
ロボットのティーチング装置及びティーチング方法
【課題】ロボットを操作するための専門知識を有していなくても作業ノウハウを正確に教示すること。
【解決手段】作業者の手に装着されるモーションキャプチャ2と、モーションキャプチャから送信される3次元座標データに基づき産業用ロボット4を制御する制御部31とを備え、制御部31は、予め定められたサンプリング間隔でモーションキャプチャの位置をサンプリングし、移動距離算出機能31aと、移動速度算出機能31b、および、産業用ロボットの保持部が、ロボットの動作基点設定機能31cで設定された動作基点から移動速度算出機能31bで算出された移動速度で、サンプリングされたすべてのサンプリング点に沿って移動するように、当該産業用ロボットをティーチングする産業用ロボット制御機能31dとを有する。
(もっと読む)
電動ハンド
【課題】大型化を避けつつ、一対の把持部材の閉じ方向および開き方向のいずれの移動でも把持対象物が把持され、且つ、停電時にも把持力を失うことがなく、把持の柔軟性と把持力の正確な検出とを両立する電動ハンドを提供する。
【解決手段】回転軸2に沿って移動する直動部材3と把持部材に連結される連結部材28との間に弾性部材50を備えている。弾性部材50は、直動部材3と連結部材28とが接近するとき圧縮され、直動部材3と連結部材28とが離間するとき伸長する。直動部材3,と連結部材28との間に弾性部材50を設けることにより、把持部材から把持対象物へ加わる力の一部は弾性部材50の変形によって吸収される。したがって、把持対象物が破損しやすい場合でも、把持対象物を柔軟に把持することができる。
(もっと読む)
ハンド装置及びロボット装置並びに機械製品の製造システム
【課題】寸法をより低減しながらもより大きな把持ストローク確保できるようにしたハンド装置及びロボット装置並びに機械製品の製造システムを提供する。
【解決手段】第1部材と、第1部材に固定された固定部材と、第1部材の一端部に固定された第1指部材と、第1部材の一端側から他端側にかけて設けられたスライド機構と、スライド機構にスライド自在に取り付けられた第1スライダ部材と、一端部が第1スライダに固定された第2部材と、第1部材の一端側から他端側に設けられたガイド機構と、ガイド機構にスライド自在に取り付けられた第2スライダ部材と、第2スライダ部材に固定された第2指部材と、固定部材と、第1スライダ部材との相対変位を第2スライダ部材に伝達する変位増加機構とを有して構成する。
(もっと読む)
応力検出素子、触覚センサー、および把持装置
【課題】小型化が可能で、かつ剪断力および押圧力を正確に検出可能な応力検出素子、触覚センサー、および把持装置を提供する。
【解決手段】応力検出素子200は、矩形状の開口部111を有するセンサー基板11と、センサー基板11上に形成されて開口部111を閉塞する可撓性を有する支持膜14と、センサー平面視において、開口部111の一辺に沿い、開口部111の内側および外側に跨って設けられ、湾曲することで電気信号を出力する剪断力検出用圧電体210と、センサー平面視において、開口部111の内側で、剪断力検出用圧電体210から離れた位置に設けられ、湾曲することで電気信号を出力する押圧力検出用圧電体310と、支持膜14を覆う弾性膜15と、を具備した。
(もっと読む)
ロボットの把持装置
【課題】ロボットの組立作業において、ワークの把持動作を確実に行う。
【解決手段】把持部材2a、2bの間にワークWを把持する工程において、各把持部材2a、2bに設けられた接触押圧部21a、21bがワークWを押圧して把持することによって発生する光学縞を検出して、把持力の制御を行う。このとき、把持部材2aに設けられたワーク有無検出部22aがワークWに接触することによって発生する光学縞を検出することで、把持部材2a、2bの間にシート状のワークWが有ることを確認する。
(もっと読む)
チャック及びロボットハンド
【課題】比較的簡素で、且つ軽量な構造で多様なワークの保持等に対応できるロボットハンド及びチャックの提供すること。
【解決手段】チャックホルダ1、操作ロッド2、及びチャック爪3からなり、チャックホルダ1は、ワークの保持開放機能を満足すべくチャック爪3が揺動自在に収まる切り込み7と、チャック爪3の基部3b背面を支持する揺動支点を備え、操作ロッド2は、その先端部に側方へ突出した加圧部8を備え、チャックホルダ1の中空部に、操作ロッド2を進退可能に挿通し、操作ロッドの加圧部8とチャックホルダ1の揺動支点で、複数のチャック爪3の基部3bを挟持し、各チャック爪3の基部3bの内面に、操作ロッド2の進退に伴う加圧部8の進退量を、各チャック爪3の遠心及び向心方向への揺動量に変換するカム部9を備えるチャック。
(もっと読む)
5指型ハンド装置
【課題】人間の手と同様の動作を実現し且つ小型軽量化を可能とすることにより、ヒューマノイドロボットに好適に採用できる5指型ハンド装置を提供する。
【解決手段】示指機構6と中指機構7との何れか一方又は両方及び拇指機構5に、指先部に作用する力を検出する力センサ21を設ける。力センサ21を備える指機構を、指先でのつまみ動作を含む器用動作を行う器用指とする。器用指以外の指機構は、器用指の動作に応じて握り動作を含む力動作を行う力指とする。
(もっと読む)
ロボットハンド用撮像装置内蔵フィンガ
【課題】発光手段を用いなくとも対象物との接触部位を撮像することのできるロボットハンド用撮像装置内蔵フィンガを提供することにより、コストの低減を図ることを課題とする。
【解決手段】対象物10を把持することで変形する弾性外皮12と、弾性外皮12を支持するフィンガ本体11と、フィンガ本体11の内部に設けられて弾性外皮12の変形状態を撮像する撮像装置13とを有する。さらに、ロボットハンド用撮像装置内蔵フィンガ101において、フィンガ本体11は、外部から撮像装置13の撮像範囲F1に光を導入する光透過部11及び12を備える。
(もっと読む)
ワーク把持装置
【課題】把持力の調節が容易なワーク把持装置を提供すること。
【解決手段】ワーク把持装置は、第1ねじ部3aと、第1ねじ部3aに対して逆向きのねじ山を有する第2ねじ部3bとが形成されたボールねじ軸3と、ボールねじ軸3を回転駆動する電動モータ4と、ワークWを挟んで把持する第1把持手段5a及び第2把持手段5bと、第1把持手段5aを直線移動させるために第1ねじ部3aに螺合している第1移動体6aと、第2把持手段5bを直線移動させるために第2ねじ部3bに螺合している第2移動体6bと、第2把持手段5bを第2移動体6bに対して直線移動させるために第2移動体6bと第2把持手段5bとの間に配設された流体圧シリンダ装置8と、を具備する。
(もっと読む)
多指ハンドおよびロボット並びに多指ハンドの把持方法
【課題】物体の形状に影響されることなく物体を傷付けることなく最適な力で把持できるようにした多指ハンドおよびロボット並びに多指ハンドの把持方法を提供する。
【解決手段】物体を把持する多指ハンドであり、指部に設けられた物体との相対位置を検出した検出結果に応じて駆動部を制御する制御手段と、指先と物体との接触状態を調整する手段とを備え、指部の先端部に設けた少なくとも2つの感圧素子を設け、すべり量検出手段として、光源と、画像情報を取り込むイメージセンサと、イメージセンサの画像情報の差分に基づいて多指ハンドに対する物体の相対的な移動量を演算する演算手段とを具備する。
(もっと読む)
電動グリッパ
【課題】 電動グリッパにおいて、軽量化を図り、部品点数を削減するとともに装置の構造を簡素化する。
【解決手段】 筺体12に固定されたステッピングモータ2の出力軸2aに円盤カム3が軸着され、筺体12と円盤カム3との間にねじりコイルばね6A,6Bが介装されている。円盤カム3の螺旋状に形成されたカム溝26A,26Bには、移動子33,33のベアリング36,36が係入され、移動子33,33はリニアガイド5によって直線的に移動するように支持されている。移動子33,33には、互いに閉じたときまたは互いに開いたときにワークを把持する把持部材4A,4Bが設けられている。
(もっと読む)
1 - 20 / 107
[ Back to top ]