
Fターム[3C007MT14]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | エンタテインメント性の向上 (51)
Fターム[3C007MT14]に分類される特許
1 - 20 / 51
コンテンツ提供システム、コンテンツ提供方法、及びコンテンツ提供プログラム
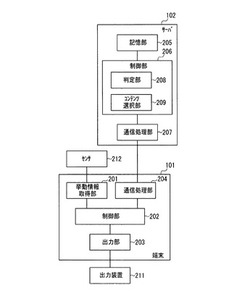
【課題】ユーザのコンテンツに対する反応を容易に取得でき、ユーザ嗜好に合ったコンテンツを提供する。
【解決手段】コンテンツ提供システムは、コンテンツを出力する出力部203と、ユーザの挙動を検出するセンサ212から得られる情報に基づいて、ユーザの挙動の種類を判定する判定部208と、出力部203で出力されたコンテンツに対応する判定部208による判定結果に基づいて、出力部203がさらに出力するコンテンツを決定するコンテンツ選択部209とを備える。
(もっと読む)
サービス提供システム及びサービス提供方法

【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
音声合成装置、ロボット装置、音声合成方法、及び、プログラム
【課題】ロボット装置の実際の動作と同期した音声を合成することが可能な音声合成装置を提供すること。
【解決手段】音声合成装置100は、予め定められた動作を行うロボット装置に適用され、且つ、処理対象となる文字列である処理対象文字列に基づいて当該処理対象文字列を表す音声である処理対象音声を合成する音声合成処理を行うように構成される。音声合成装置100は、上記処理対象文字列の少なくとも一部である動作付随文字列と対応付けられた動作を上記ロボット装置が実行するために要する時間である動作実行時間を取得する動作実行時間取得部101と、上記取得された動作実行時間に亘って発せられる音声であって、上記動作付随文字列を表す音声である、動作付随音声を含む上記処理対象音声を合成する上記音声合成処理を行う音声合成処理実行部102と、を備える。
(もっと読む)
電子機器
【課題】人に生物的な擬似感覚を与える新たなペット型玩具あるいはペット型ロボットの提供。
【解決手段】燃料電池21と、燃料電池21の出力に関する情報を電気信号に変換して出力するコントローラ10と、コントローラ10から出力される電気信号に基づいて、外部から認知可能な物理的変化を提示するスピーカ18、アクチュエータ3AA1〜5A2等を備える電子機器を提供する。この電子機器では、生物個体の活動に近似した燃料電池の出力特性に応じて動作や音声出力等を制御し、ユーザに提示させることで、ユーザに生物的な擬似感覚を与えることができる。
(もっと読む)
コミュニケーションロボット
【課題】コミュニケーション対象との親密度に応じて多様なコミュニケーション行動を実行することができるコミュニケーションロボットを提供する。
【解決手段】コミュニケーションロボットは、一連の行動プログラムからなる行動モジュールを実行することによってコミュニケーション行動を取るものであり、対象となるユーザとの親密度を記憶したユーザ親密度記憶手段と、ユーザとの対話距離、ユーザとの接触状況、ユーザの顔の表情、ユーザの視線の位置などユーザの現在の反応をセンシングしたセンシング情報に基づいてセンシング親密度を算出するセンシング親密度算出手段と、ユーザ親密度とセンシング親密度とに基づいてコミュニケーション親密度を算出するコミュニケーション親密度算出手段と、コミュニケーション親密度に対応付けた行動を実行するときの行動モジュール実行情報が記憶されている行動モジュール実行情報記憶手段を有する。
(もっと読む)
ロボット装置及び動作制御方法
【課題】 表現の豊富化を可能にするとともに、遷移する際の姿勢や動作が最適化されたロボット装置及び動作制御方法を提供する。
【解決手段】 ロボット装置1は、コントローラ32により、現在の姿勢から目標とされる姿勢又は目標とされる動作までの経路を、行動指令情報S16に基づいて、姿勢及び動作が登録されて構成され、姿勢とこの姿勢を遷移させる動作とを結んで構成されたグラフ上において探索し、探索結果に基づいて動作させて、現在の姿勢から目標とされる姿勢又は目標とされる動作に遷移させることにより、ロボット装置1やコンピュータグラフィックスで動くキャラクターの表現の豊富化が可能になる。
(もっと読む)
仮想空間と連係した多重ロボット制御装置および方法
【課題】ロボット適用の制約のうちの一つである実際環境の複雑性や動的な面に対する対応性を解決し、ユーザの好奇心の誘発や開発者の創意力を増大させること。
【解決手段】ロボット周辺の環境変化だけでなく、ウェブなどを含む仮想空間上における情報変化によるイベントが発生した場合、発生したイベントに対応する行為データを多数のロボットに送出する仮想空間と連係した多重ロボット制御装置を設け、該当ロボットの個別行為や群集行為を制御できるようにする。
(もっと読む)
エンターテイメントにおけるロボットのリモコン装置、制御方法及び制御プログラム
【課題】 演劇、ミュージカル、漫才、コントなどのエンターテイメントにロボットを用いる場合、ロボットと人(役者)との演技のタイミングを合わせることができるリモコン装置、制御方法及び制御プログラムを提供する。
【解決手段】 ロボットが次の演技を行うための待機状態において、異なるID番号を付加されたリモコン装置より送信される制御信号の有無を判断し、次の動作(演技)を実行する。所定時間内に制御信号が無ければ予め定められた行動パターンを実行する。
(もっと読む)
コミュニケーションロボット及びその制御方法
【課題】対象者に応じて適切な発話を行うことができるコミュニケーションロボットを提供する。
【解決手段】対象者と会話によってコミュニケーションを図るコミュニケーションロボットであって、対象者の年齢及び反応に応じて発話信号の音量及び/又は周波数を制御する。コミュニケーションロボットは、対象者の年齢を判定する年齢判定部と、年齢判定部によって判定された前記対象者の年齢を入力する年齢入力部と、対象者の反応を判定する反応判定部と、反応判定部によって判定された前記対象者の反応を入力する反応入力部と、年齢入力部に入力された前記対象者の年齢及び反応入力部に入力された対象者の反応に応じて発話信号の音量及び/又は周波数を制御する発話制御部と、を有する。
(もっと読む)
ガイドロボット
【課題】展示物を見る人が、その説明を希望している場合に説明するガイドロボットを提供する。
【解決手段】撮影手段50と、映像から入場者90の顔を検出する顔検出手段71と、その顔の向きを検出する顔向き検出手段72と、ロボットの発話内容及び行動を決定する発話・行動決定手段73と、発話データを音声出力する発話手段と、頭部10を回転して顔の向きを変える頭部回転手段とを備え、展示物91の説明過程で頭部10を回転して顔側の向きを変え、そのときの入場者90の顔向きに基づいて、その後の発話内容または行動を決定する。ガイドロボットが説明の途中で入場者90の方に顔を向けると、入場者90は、その動きに反応して顔を展示物91からロボットの方に向ける。ガイドロボットが入場者90の方に顔を向けても、入場者90の反応が見られないときは、その入場者90はロボットの説明を聞いていない、あるいは、興味がないと判定できる。
(もっと読む)
ロボット、及びロボットの制御方法
【課題】自然な動作が可能となるロボット、及びその制御方法を提供すること。
【解決手段】本発明の一態様にかかるロボット100は、胴体部6と、胴体部を所定の軸周りに回転させる車輪2のモータ131bと、胴体部6に取り付けられた頭部1と、頭部1を所定の軸と平行な軸回りに対して回転させる首関節7と、アクチュータ、及び関節を制御する制御部101と、頭部1に対して所定の軸回りにかかる力を検出するためトルクセンサ125aと、を備えている。制御部101が、トルクセンサ125aからの出力値としきい値とを比較して、トルクセンサ125からの出力値がしきい値を越えていた場合に、出力値が低減するように、車輪2のモータ131bを制御する。
(もっと読む)
コミュニケーションロボット
【課題】多様な動作を発現できるコミュニケーションロボットを提供すること。
【解決手段】ロボットRは、状況DBへの書き込みを状況変化として検出する状況変化検出手段110と、状況DBへの書き込みを状況変化として検出したときに状況DBに登録されているデータで示される状況に応じたルールを、状況に応じた発話や動作の実行命令と実行命令に関連付けられた興味度とを含むルールを複数格納したルールDBから検出するルール検出手段120と、検出されたルールに含まれる興味度を、状況DBにおいて可動部のそれぞれおよび音声出力部のうちの1つ以上の部位に対して独立に設定する動作発現パラメータ設定手段130と、状況DBにおいて設定された興味度を個別に変化させるパラメータ変更手段140と、状況DBに設定された興味度を含むルールで示される実行命令を、興味度が設定された部位に対して実行させる指令手段150とを備える。
(もっと読む)
ロボット装置及びその制御方法
【課題】利用者に対してよりパーソナルなロボット装置を提供する。
【解決手段】過去における各利用者による操作履歴や対話履歴、及びロボット感情値を状態管理テーブル123に保持する。本ロボット装置の人物特定手段108は新たに遭遇した人物が過去の利用者であることが判明すると、感情・性格性格手段106は現在のロボット感情値122と状態管理テーブル123に保存された該当人物の過去のロボット感情値を参照して、新たなロボット感情値を生成する。
(もっと読む)
データ切り出し装置、データ切り出し方法及びデータ切り出しプログラム
【課題】ロボット装置を動かすためのモーションデータをコンテンツの特徴に合わせて容易に生成する。
【解決手段】楽曲データGDを解析してビート位置を検出するとともに、ビート位置により区切られる楽曲データGDの複数のビート区間Btそれぞれのビート区間特徴を得ると、このようにして得たビート区間Btそれぞれのビート区間特徴に応じて、モーションパーツデータをモーションデータMDから切り出し、この切り出したモーションパーツデータに対して、特徴解析情報TIDを付加するようにしたことにより、楽曲データGDの音楽区間毎の特徴に対応する特徴解析情報TIDを有するモーションパーツデータを選ばせることができ、かくして、ロボット装置11を動かすためのモーションデータMDを、楽曲データGDに基づく音楽の特徴に合わせて容易に生成することができる。
(もっと読む)
表面に情報表示および相互作用機能を備える可動装置
【課題】表面に情報表示および相互作用機能を備える可動装置を提供する。
【解決手段】表皮ユニット11が可動本体10表面に貼設されることによってケーシングに情報を表示することができ、ソフトウェアの制御によって外皮の色、図案または文字情報を随時変化させることができる。可撓性ディスプレイ110には更にタッチセンサユニット112を設置することができ、入力される相互作用信号を感知できる。可動本体10には環境センサまたは情報識別装置を整合でき、有線または無線の技術によって環境情報、文字情報または画像音声情報の判断を入力信号とし、複数の入力信号と出力表現信号とを整合して可動本体10の相互作用性を高めることができる。
(もっと読む)
動きデータ生成装置、動きデータ生成方法及び動きデータ生成プログラム
【課題】音楽の曲調に同期した動きの動きデータを生成する。
【解決手段】所定の動きパターンに応じた動きパターンデータを記憶しておいて、音楽データを分析して当該音楽データに基づく音楽のビートを検出して、当該検出したビートに基づいて音楽データを複数の小節区間に区切ったとき、当該区切った音楽データの小節区間に対して動きパターンデータを割り当てるようにして、動きデータを生成するようにしたことにより、音楽データと共に動きデータを再生するとき、音楽データMD1に基づく音楽を楽譜で表現したときの、小節に対応する第1の小節区間MS1及び第2の小節区間MS2の切り換えに同期させて、動きパターンを切り換えることができ、かくして、音楽の曲調に同期した動きの動きデータを生成し得る。
(もっと読む)
ロボットシステム
【解決手段】ロボットシステム10は身体動作の実行ロボット14を含み、モーションキャプチャシステム16を用いて操作者の動作を計測し、ロボット制御装置12により操作者の動作をロボット14に再現させる。分解済動作DB18は各人間に対応付けて、特定動作を複数の人間に共通の動作成分から構成される一般動作と或る人間に特有の動作成分から構成される癖動作とに分解して記憶している。ロボット14の遠隔操作を行うときには、操作者は、分解済動作DB18に記憶した人間の中から、癖動作を使用する人間を指定する。ロボット制御装置12は、操作者の動作に対応する一般動作と指定された人間の癖動作とを合成した動作をロボット14の動作コマンドに変換し、その動作コマンドをロボット14に送信する。ロボット14は送信された動作コマンドに基づいて自身の身体動作を制御する。
【効果】ロボットはその身体動作において特定の人間の個性や雰囲気を表現できる。
(もっと読む)
魚様ロボット
【課題】 組み立て・解体が容易で点検・保守に便利な搭載品収納水密容器を備え、且つ単に水平方向に遊泳するだけでなく、3次元までの多様な運動が可能な魚様ロボットを提供する。
【解決手段】中空円筒21と,その中空円筒21の端部に嵌め込まれる円形端板23,24と,その円形端板23,24と中空円筒21の端部内面との隙間をシールするOリングと,を含む、搭載部品収納用水密容器20を備えている。また、尾鰭17を含む胴後部16を遥動させるところの、弾性変形容易な一枚の遥動板31を備えていると共に、その遥動板31の全て又は前側の一部を除く大部分を、その揺動板31を湾曲、揺動する駆動機構30とは別の駆動機構40によって胴本体部分15の鉛直対称面に対して左右に傾斜させ、折り曲げることが可能に構成されている。
(もっと読む)
ロボット装置及びその制御方法
【課題】 ロボット間でコミュニケーションをとることができるロボット装置及びその制御方法を提供する。
【解決手段】 ロボット装置の内部状態を示す信号パターンを記憶する信号パターン記憶回路4と、他のロボット装置の内部状態を示す信号パターンを検出する信号検出回路2と、上記信号検出回路2により検出された情報と上記信号パターン記憶回路4に記憶されている情報とを信号比較回路5により比較して、上記他のロボット装置の内部状態を認識する。
(もっと読む)
制御装置、対戦型ロボットシステム、及びロボット装置
【課題】 操作者によって操作されて対戦する複数のロボット装置の制御に関し、種々の工夫を行って趣向性を高めることが可能な制御装置を提供する。
【解決手段】 操作者によって操作されて対戦する複数のロボット装置3、5を制御する制御装置19は、複数のロボット装置3、5のいずれかが操作者によって操作されて攻撃動作が実行される前に、当該攻撃動作が実行されることにより他の対戦相手のロボット装置3、5が受ける物理的影響の度合いが予め定められた範囲内に収まるように、実行される攻撃動作を自動調整する自動調整部23を備える。
(もっと読む)
1 - 20 / 51
[ Back to top ]