
Fターム[3C007WA12]の内容
マニピュレータ、ロボット (46,145) | 自走、自律型のタイプ (2,408) | 移動形式 (1,340) | 脚式 (684)
Fターム[3C007WA12]の下位に属するFターム
Fターム[3C007WA12]に分類される特許
1 - 20 / 47
軌道計画方法、軌道制御方法、軌道計画システム及び軌道計画・制御システム
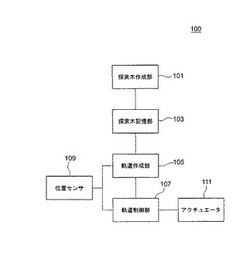
【課題】物体の種々の初期状態から目標状態までの軌道を、探索に制約を伴わずに少ない計算コストで求めることのできる軌道計画システム、及び求めた軌道にしたがって目標状態までの軌道を制御することのできる軌道計画・制御システムを提供する。
【解決手段】軌道計画システムは、状態空間において、該目標状態を根とし、該目標状態に至るまでの状態を枝として、予め区分された状態空間の複数のセルのそれぞれに一つの枝を有する探索木を予め作成する探索木作成部(101)と、該探索木を記憶する探索木記憶部(103)と、該物体の現在の状態を求め、該現在の状態に対応する該探索木の枝を求め、該現在の状態に対応する該探索木の枝から該根までの探索木上の経路を、物体の軌道として求める軌道作成部(105)と、を備える。軌道計画・制御システムは、さらに目標状態までの軌道を制御する軌道制御部(107)を備える。
(もっと読む)
足底機構

【課題】斜面歩行を支援する足底機構を提供する。
【解決手段】足底機構10は、一対の袋体26a、26bと、ソール板14と、流路24と、バルブ22を備える、一対の袋体は、足底の前後に配置されており、膨張収縮が可能である。ソール板14は、一対の袋体の下側に取り付けられており、袋体の膨張収縮に応じて傾きが変化する。流路24は、一対の袋体を連通する。バルブ22は、流路を開閉する。バルブ22は、足底が地面から受ける荷重が予め定められた荷重閾値を下回っている場合には開いており、荷重が荷重閾値を超えた場合に閉じる。バルブ22が開いている間に流体の移動によってソール板14が斜面に合わせて傾斜し、バルブ22が閉じるとソール板14の傾斜が固定される。ソール板14が固定されると、ユーザの足裏を水平に保ち易くなる。
(もっと読む)
ロボット本体のキャスティング方法及び装置
【課題】 到達が困難な位置に、ロボット本体を正確に移動させることができ、災害救助や宇宙空間の作業等に広く応用することを可能にする。
【解決手段】 ロボット本体の初期位置と、ロボット本体の目標到達位置の3次元座標とに基づいて、少なくとも3カ所の目標固定位置を決定し、ワイヤの先端に設けられたグリッパあるいはアンカーをそれぞれの目標固定位置に固定し、ロボット本体と目標固定位置との間をそれぞれワイヤで連結する。次にロボット本体の目標キャスティング軌道を演算し、ワイヤのうち、少なくとも2本のワイヤの張力をそれぞれの目標値に制御し、各ワイヤにより張力拮抗状態を形成する。その後張力拮抗状態にあるワイヤのいずれかの固定を解除し、蓄積された弾性エネルギにより、ロボット本体を3次元空間にキャスティングするとともに、ロボット本体の3次元空間での運動を、各ワイヤの繰り出し量、巻き取り量、あるいは張力を別個に制御する。
(もっと読む)
軌道計画方法、軌道計画システム及びロボット
【課題】計算コストを抑えながら状態空間の探索に制約が生じることのない軌道計画方法及び軌道計画システムを提供する。
【解決手段】物体の状態を状態空間において探索木の根として定め、所定の時間間隔における力学的な関係から時間経過した後の該物体の次の状態を状態空間において探索木の枝として定める探索木作成部101を備える。さらに既知状態登録木を記憶する既知状態登録木記憶部105と、予め区分された状態空間の複数のセルから次の状態が属するセルを定め、該セルに属する状態が既知状態登録木の枝としてすでに登録されているかどうか判断し、登録されている場合に次の状態を破棄し、そうでない場合に次の状態を該既知状態登録木の枝として登録する既知状態登録木作成部103と、を備える。既知状態登録木の枝として登録された状態の中から目標状態までの距離がもっとも小さい状態を選択し、その状態から軌道を求める軌道作成部107を備える。
(もっと読む)
ロボット
【課題】簡素な構成にすることができ、しかも省エネ型に構成することができるロボットを提供する。
【解決手段】少なくとも複数本の可動脚2を備えたロボットであって、可動脚2は、胴体部に回転自在に備えた股関節部5と、股関節部5から一対の大腿部平行リンク7A,7Bを介して連結される膝関節部6と、膝関節部6から一対の下腿部平行リンク9A,9Bを介して連結される足関節部8と、大腿部平行リンク7A,7Bのうちの一方の大腿部リンク7Aの膝関節側端部に固定されたギヤ12と、ギヤ12と噛合うようにギヤ12を備える大腿部リンク7Aと同一側の下腿部リンク9Aの膝関節側端部に固定された連動ギヤ13と、股関節部5を回動させるためのアクチュエータ16とを備えさせた。
(もっと読む)
移動環境認識装置及び方法
【課題】移動体の移動対象を簡易に測定する。
【解決手段】円錐検出光DETと測定対象の表面S2との交点TRからの反射光に基づいてセンサ原点Oから測定対象S2までの距離を測定し、当該測定結果から得た交円TRの特徴量によって測定対象表面S2の形状を求めるようにしたことにより、円錐検出光DETの立体的な構成を利用して測定対象S2の形状を簡便かつ確実に測定することができる。
(もっと読む)
三足歩行ロボット
【課題】 歩行ロボットには多数の関節があり、その関節を駆動するアクチュエータ、制御回路、制御ソフトウェアの製作・整備に多大な負担がかかり、しかし歩行ロボットの運用場面においては不要な機能も存在し、これが無用な重量増加も生み出し、歩行ロボットの運用を困難なものにしていた。
【解決手段】 移動動作をするためにアクチュエータを搭載した脚部を歩行ロボット腰部中央にのみ設置する事で移動動作に要するアクチュエータの数を減らし、この脚部を持ち上げた状態での胴体を支持できる支持脚を腰部に設置する。
(もっと読む)
三足歩行ロボット
【課題】従来の歩行ロボットは、姿勢制御を行うためのソフトウェアが複雑であり、またその問題を解決する目的で三本以上の脚部を搭載する歩行ロボットを用いる場合にはアクチュエータの数が増え、結果としてその多数のアクチュエータを制御する制御回路も複雑なものとなり、この部分の製作や整備に多大な労力が必要であった。
【解決手段】中央の脚部、または左右の脚部を用いて重心の左右の変化を抑えて歩行を行うようにする。さらに左右の脚部を連動させる事により脚部一本分のアクチュエータで二本の脚部を動作させる事で、一度に制御する必要のあるアクチュエータの数を二足歩行ロボットと同程度に減らす。
(もっと読む)
移動体、及びその制御方法
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者が搭乗する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席8の座面に加わる力に応じた計測信号を出力する力センサ9と、力センサ9からの出力に応じて、車輪6を駆動するための指令値を算出する制御計算部51と、移動体モードと、移動体モードの場合よりも車輪6の駆動を制限して椅子としての使用を可能とする椅子モードとの間で動作モードを切替えるモード切替手段と、を備えるものである。
(もっと読む)
移動ロボットおよび移動ロボット制御システム
【課題】高価なセンサを用いることなく、移動ロボットの周囲に存在する障害物をより効率的に検知することができる移動ロボットおよび移動ロボット制御システムを提供することである。
【解決手段】移動ロボット100は、移動ロボットを移動させる移動機構と、複数の第1の距離取得手段106とを含む。複数の第1の距離取得手段106の各々は、複数の測定方向に位置する障害物までの測定距離を取得する。複数の第1の距離取得手段106は、所定時間毎に同期して測定方向を切り替える。移動ロボットは、第1の距離取得手段の間に第1の距離取得手段の測定可能レンジよりも短い第2の距離取得手段126を含む。
(もっと読む)
不整地移動体用の半自律走行法
【課題】 従来、不整地環境を移動する移動体の移動方式において、主推進力発生部により走行するのみならず、可動腕3を用いて走行することで、走破性を向上させる方式が採られている。しかしながら、走破性が向上する反面、遠隔操作が困難になるという問題があった。
【解決手段】 本発明における不整地移動体は、主推進力発生部、可動腕部、測距装置を有する。測距装置を用いることで、地形に応じて可動腕を動かし、なお且つ転倒安定性を考慮に入れながら、移動体が半自律的に移動することにより、操縦者は移動体の移動方向を指示するのみで、移動体がその方向の不整地に応じた不整地移動機構の安全な動作を自律的に生成することが可能になる。
(もっと読む)
ロボットの関節ロック機構
【課題】ロボットが直立でのアイドリング状態において、駆動装置を作動させることなく、関節部を固定することができるロボットの関節ロック機構を提供する。
【解決手段】ロボットの関節ロック機構は、関節部を挟んで上下のフレーム材2、3と、上下のフレーム材2、3を回転可能に連結する連結機構4と、上側又は下側の一方のフレーム材に設けられたモータ等の駆動装置5と、第1のアーム7と、第2のアーム8とが回転可能に連結されており、一方のアームの端部は駆動装置に連結され、他方のアームの端部は他方側のフレーム材に回転可能に連結されたリンク機構6と、を備えている。リンク機構6は、関節部を固定する際に過開き状態となり、第1又は第2の一方のアームに立設された位置決めブロック10に他方側のアームが引っ掛かって、位置決めブロック10がロボットの関節部より上方の構成部材の自重を支持する。
(もっと読む)
ロボット装置、顔認識方法及び顔認識装置
【課題】 動的に変化する環境下でロボットはユーザの顔を一定時間内に認識する。
【解決手段】 ロボットは、CCDカメラによる撮像画像に含まれる顔の特徴を抽出する顔抽出部と、前記顔抽出部による顔抽出結果を基に顔を認識する顔認識部を備えている。顔抽出部は方位選択性を持ち周波数成分の異なる複数のフィルタを用いて画像をフィルタリングするガボア・フィルタで構成され、顔認識部は顔抽出結果を非線型な空間に一度写像して該空間内で分離する超平面を求めることにより顔と非顔とを識別するサポート・ベクタ・マシーンで構成される。
(もっと読む)
振動移動装置
【課題】 ギヤやリンク等の部品を使用することなく、きわめて簡単な機構で移動を可能とする振動移動装置を提供する。
【解決手段】 移動体本体11と、移動体本体11に備えられ、移動体本体11の外周に沿って進行する振動波を発生させる振動発生手段17と、振動発生手段17の動作を制御する制御手段15と、移動体本体11に取り付けられる弾性を有する複数の支持手段21と、支持手段21の下部側に設けられ、方向によって接地面Gとの摩擦抵抗の異なるソール部材23とを備え、振動発生手段17によって移動体本体11の外周に沿って進行する振動波を発生させることにより、支持手段21を介して接地面Gに作用する振動波の反作用によって移動体本体11を移動させることを特徴とする。
(もっと読む)
非線形弾性機構
【課題】 小さな力で動くことによって制御誤差を吸収し、かつ、大きな応力には大きな反力をもって拮抗するバネ機構を実現する。
【解決手段】 クランク1にロッド2とバネ3を接続し、バネ3の変位量が最小となる位置を基準位置とし、基準位置ではロッド2とクランク1のなす角を90°付近にすることで、ロッド2の直動運動に対するバネ3の弾性係数が0に近く、回転軸4を中心にクランク1が90°回転した状態ではロッド2の直動運動に対するバネ3の弾性係数が発散する。
(もっと読む)
関節モジュール及び脚型ロボット
【課題】リンクの幅及び長さを適宜の幅及び長さに構成するのに好適な関節モジュール、該関節モジュールから成る脚部を有する脚型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、回転関節18の第3回転駆動機構180を、関節モータ40と、関節モータ40の回転方向を変換する駆動及び従動傘歯車180a及び180cと、動力伝達用回転軸180bと、動力伝達用回転軸180bの回転力を膝関節回転軸182に伝達する駆動、従動プーリ180d、180f及びベルト180gと、減速機180eとを含んだ構成とし、関節モータ40を、膝関節用ハウジング17cの内側に、出力軸140の先端を下方向に向けた姿勢で支持し、動力伝達用回転軸180bの軸心O1と、膝関節回転軸182の軸心O2とを、脚部12の前後方向に所定距離を離間して配設し、且つ両者を他の部品と接触しない範囲で、垂直方向に接近させて配設した。
(もっと読む)
多脚型走行装置
【課題】歩行移動ができ、かつ前方に車体底部高さに匹敵する高い段差がある場合でも、従来の静歩行よりもスムーズに、かつ段差から滑り落ちることなく、その段差を乗り越えることができる多脚型走行装置を提供する。
【解決手段】フラットな底面12aを有する車体12と、車体の移動方向に直交する水平軸を中心に一端14aが揺動可能に取り付けられ、中間部に関節14bを有し、他端に路面と接する足部15が取り付けられた4以上の脚14とを備える。脚と関節は、前後に揺動又は屈曲させて車体を歩行移動させる。さらに車体12の底面より下方に位置し、路面4と接触する際に車体の後方への移動を防止する後退防止機構16を備える。
(もっと読む)
脚車輪型ロボット
【課題】 重量およびエネルギー消費量の増加を抑制し、旋回時の駆動トルクを低減するのに好適な脚車輪型ロボットを提供する。
【解決手段】 脚車輪型ロボット100は、基体10と、基体10にヨー軸回りの自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、ヨー軸回りの自由度の範囲で脚部12を駆動するための動力を付与する関節モータ40とを備え、障害物回避時における脚部12の駆動制御および走行時における駆動輪20の操舵制御を、関節モータ40を共通に用いて行う。
(もっと読む)
脚式ロボットの動作制御のための外乱検出方法及びその装置
【課題】脚式ロボットの転倒合力を検出し、補償するための技術を提供する。
【解決手段】脚式ロボットの胴体に関する3軸の並進加速度と3軸の回転角加速度のうちの少なくとも1軸についてのロボット慣性力、あるいはそのロボット慣性力を等価的に算出できる慣性力検出装置を備え、想定する床面に対してロボットが転倒しない動作を生成するとともに、生成した動作で発生しようとしている足裏力を出力する動作生成装置を備えた脚式ロボットにおいて、慣性力検出装置で検出される慣性力と、上記動作生成装置で発生しようとしている足裏力の加減算から、動作生成装置が想定していた床面と脚式ロボットが実際に立脚している床面の誤差を起因として床面が脚式ロボットを転倒させようとする力である床起因転倒力と、外部から胴体に作用する力である外部起因転倒力との合力である転倒合力を検出し、補償する。
(もっと読む)
セキュリティモニタシステム
【課題】 日常生活における行動情報の連続性およびセキュリティを維持し得るロボットによるセキュリティモニタシステムの提供
【解決手段】 在宅モードで、ロボットはモニタ対象者の屋内での行動情報を取得し、取得した行動情報に応じたセキュリティ動作を実行する(S1)。モニタ対象者の外出を音声認識により確認すると留守番モードに移り、ロボットは、音声認識により、外出登録(外出開始時間、帰宅予定時間、外出先等の登録)および帰宅登録(帰宅時間の登録)を行って在宅モードに切り換える。また、留守番モードにおいて無断外出や外出時間超過があると心配モードに移行する(S2〜S4)。心配モードでは、ロボットはモニタ対象者のセキュリティ処理を実行する(実施例では、外出時間超過の旨を登録済みの関係先に連絡する(S5〜S8)。
(もっと読む)
1 - 20 / 47
[ Back to top ]