
Fターム[3C007WA13]の内容
マニピュレータ、ロボット (46,145) | 自走、自律型のタイプ (2,408) | 移動形式 (1,340) | 脚式 (684) | 二足 (552)
Fターム[3C007WA13]に分類される特許
1 - 20 / 552
脚式ロボット、その制御方法、及び制御プログラム
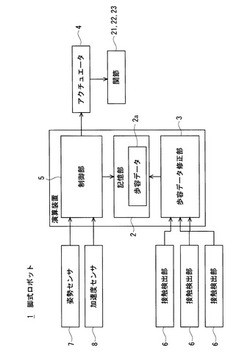
【課題】不整地路面に足部を確実に着地させること。
【解決手段】脚式ロボット1は、胴体10と、胴体10に連結された脚部20と、脚部20の下端に設けられた足部26と、歩容データ2aを記憶する記憶手段と、記憶手段に記憶された歩容データ2aに基づいて、脚部20の関節を駆動制御する制御手段と、足部26の足裏と路面との接触を検出する接触検出手段と、接触検出手段により検出された足部26の足裏と路面との接触位置を中心にして、足部26をロール軸及び/又はピッチ軸周りに回転させ、足部26の足裏の他の部分を路面に接地させるように歩容データ2aを修正する歩容データ修正手段と、を備える。
(もっと読む)
脚式ロボット

【課題】着地時の安定性を向上させた脚式ロボットを提供する。
【解決手段】脚式ロボットは、足裏に配置されたボール20と、ボール20の回転を止めるブレーキ14と、コントローラを備える。ボール20は、足の踵に回転可能に支持されており、一部が足裏に露出している。コントローラは、脚式ロボットが歩行するように脚の動きを制御するとともにブレーキ14を制御する。コントローラは、足が浮いている間はブレーキ14を解放し足12が着地した後にブレーキ14を係合する。ブレーキ14を係合するまではボール20が自由に回転するので足と路面との摩擦抵抗は小さく、ブレーキ14を係合すると摩擦抵抗が大きくなり安定する。
(もっと読む)
二足歩行ロボット
【課題】脚体にかかる負担を軽減してロボットの作業能力を向上させることができる二足歩行ロボットを提供する。
【解決手段】上体1を上側の上部基体5と下側の下部基体6とで構成する。下部基体6に上部フレーム9と下部フレーム10とを設ける。下部フレーム10に脚体2を連結する。上部フレーム9に回転軸12を介して上部基体5を連結する。上部フレーム9を、揺動軸27を介して下部フレーム10に連結する。下部フレーム10に対して上部フレーム9を揺動させることにより、ロボットの上体1で前屈姿勢をとることが可能となる。
(もっと読む)
ロボット歩行装置
【課題】構造が簡便で製造費が安価で且つ堅牢な、競走競技に適した歩行ロボットを提供する。
【解決手段】ロボット走行装置は、胴体と、1対の脚部と、前記脚部の下端部に装着された足裏部材と、前記1対の脚部を交互に走行させる駆動機構を有する。脚部は、ロボットの胴体の矢状面に対して垂直に配置された枢動軸回りに枢動可能に構成され、駆動機構は、遠隔操縦によって回転可能なモータと、該モータの軸に装着された回動板と、該回動板の両側に装着された1対の揺動軸と、を有する。
(もっと読む)
ロボット用肢体駆動機構、およびこの肢体駆動機構を用いたロボット装置
【課題】低コストで製造可能であり、上肢を上方に持ち上げてその状態を長時間維持することができるロボット装置と、ロボット用肢体駆動機構を提供する。
【解決手段】ロボット用肢体駆動機構は、胴体部11と、胴体部11に対して可動自在に設置される肢体支持部材21と、肢体支持部材21に対して設置される可動肢体22と、胴体部11に固定設置されて駆動力を及ぼすアクチュエータ24と、複数のリンク23a,23cと、当該複数のリンク23a,23cを可動自在に接続するジョイント23bとから構成され、一端側のリンク23aがアクチュエータ24に接続し、他端側のリンク23cが肢体支持部材21と接続することで、アクチュエータ24と肢体支持部材21とをリンク接続するリンク部材23とを備えており、アクチュエータ24から及ぼされる駆動力が、リンク部材23を介して肢体支持部材21に伝達される。
(もっと読む)
バッテリ保持装置
【課題】作業者の負担を軽減してバッテリ収納室におけるバッテリの出し入れを円滑に行うことができるバッテリ保持装置を提供する。
【解決手段】バッテリ保持装置1はバッテリ18とバッテリ収納室19とからなる。バッテリ収納室19は、第1揺動軸23を介して連結された開閉部材21と、開閉部材21に第2揺動軸26を介して連結された移動部材27とを備える。移動部材27は開閉部材21の開方向への揺動によりバッテリ18の取り出し方向に移動するとき、バッテリ18に係止して開閉部材21の揺動力をバッテリに伝達する係止部29を備える。
(もっと読む)
二足歩行ロボット
【課題】簡単な構成で人間に近いスムーズな歩行、また外部からの衝撃にも倒れづらい二足歩行ロボットを実現する。
【解決手段】永久磁石4、4A、4B、4Cと鉄板9、9A、9B、9Cをそれぞれ吸着させる。永久磁石4、4Aを取り付けた板5をモーター3によって90度回転させ、永久磁石4は鉄板9からアルミ板8A、永久磁石4Aは鉄板9Aからアルミ板8Aの上にそれぞれスライドさせ、永久磁石4と鉄板9、永久磁石4Aと鉄板9Aによる吸着をとく。その状態からモーター3B、3Cを右足1の底面が床面10と平行に持ち上がるようそれぞれ30度回転させると重心移動を要さずに右足2を持ち上げる事が出来る。右足1を持ち上げた後、モーター3B、3Eを足1が床面10と平行に接するようにそれぞれ30度回転させると前進することができる。
(もっと読む)
マスタ・スレーブ型ロボット操作システム
【課題】安価で操作性に優れたマスタ・スレーブ型ロボット操作システムを提供する。
【解決手段】マスタ・スレーブ型ロボット操作システムは、操作者によって操作されるマスタ操作装置10と、遠隔操作されるスレーブロボット装置と、マスタ操作装置とスレーブロボット装置との間で両装置の状態情報を双方向通信する情報通信手段30とを備える。スレーブロボット装置は、任意の姿勢又は動作を実現するために複数のアクチュエータを備えている。マスタ操作装置10は、スレーブロボット装置が備える構造に対応する構造を備えることでスレーブロボット装置が取り得る任意の姿勢又は動作と同様の姿勢又は動作を実現可能であり、且つ、スレーブロボット装置に設置された複数のアクチュエータに対応した複数のアクチュエータ13a〜13hを備えている。
(もっと読む)
二足歩行ロボットの股関節構造
【課題】傾斜角度のある斜面での直進歩行を実現し、軽量化および製作コストを削減したロボットを提供することを目的とする。
【解決手段】胴体部及び該胴体部に連結される左右の脚部を有する二足歩行ロボットにおいて、左脚部に連結する左サイドギア、該左サイドギアに噛合される左ピニオンギアとを備える左モジュールと、右脚部に連結する右サイドギア、該右サイドギアに噛合される右ピニオンギアとを備える右モジュールと、前記2つのモジュールを平行リンク又は同径のプーリで結合させ、胴体部に対して常に同位相同角度で傾斜するように拘束し、さらに前記各ピニオンギアを同径のプーリで同期させることにより前後の脚部運動が逆位相同角度となるように拘束することを特徴とする。
(もっと読む)
位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラム
【課題】専用の部材を取り付けなくても、ロボットであることを識別することができる、位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラムを提供する。
【解決手段】第1の位置情報取得部2は、物体の第1の位置情報を取得し、第2の位置情報取得部302は、移動体の移動に基づく第2の位置情報を取得し、位置情報認識部303は、前記物体の第1の位置情報の時系列と前記第2の位置情報の時系列とを照合し、前記第2の位置情報の時系列が合致する前記物体の第1の位置情報の時系列を、移動体の位置情報の時系列と認識する。
(もっと読む)
装着型動作支援装置
【課題】腰部フレームと、腰部フレームの上部に接続されて装着者の肩に係留される背部フレームと、腰部フレームの下部に接続されて装着者の下肢に係留される下肢フレームとを備えた身体装着型動作支援装置であって、装着者の歩行時に装着者の骨盤の揺動に起因する背部フレームの揺れを抑制することを目的とする。
【解決手段】装着型動作支援装置10に、装着者の左右方向に長尺な基部31を有する腰部フレーム30と、腰部フレーム30の下部に接続される左右一対の下肢フレーム50,50と、腰部フレーム30の基部31の上部に接続される背部フレーム40と、背部フレーム40と腰部フレーム30の基部31とを接続する接続部70とを備える。接続部70は、前額面上の1自由度の回転機構であって、例えば、四節リンク機構で構成される。
(もっと読む)
触覚センサシステム
【課題】触覚センサの配置密度が部位毎に異なるロボットに、触覚センサからの出力信号を情報統合装置へ中継する中継装置を配置するに際し、中継装置の好適な配置態様を提供する。
【解決手段】ヒューマノイドロボット1の触覚センサシステム100は、ヒューマノイドロボット1のロボット本体2の表面に配置された複数のセンサノード200と、複数のセンサノード200から出力された出力信号を中継する中継部401を有するリレーノード120と、リレーノード120の中継部401によって中継された出力信号を受信して処理するホストノード140と、を備える。複数のセンサノード200をヒューマノイドロボット1のロボット本体2の部位に応じて少なくとも2つ以上の区分に区分し、各区分毎に、リレーノード120を配置した。
(もっと読む)
ロボットおよびその行動制御システム
【課題】上体の運動によって指定タスクを実行しながら、継続的に安定することができるロボット等を提供する。
【解決手段】本発明のロボット1または行動制御システム2によれば、確率遷移モデルにしたがって、腕体の運動状態を表わす「第1状態変数」の時系列的な変化態様が、第1状態変数のうち少なくとも1つがロボット1に指定タスクを実行させるための第1指定運動軌道{r}に追従するように生成される。また、同じく確率遷移モデルにしたがって、上体の運動状態を表わす「第2状態変数」の時系列的な変化態様が、第2状態変数が継続的に安定な動力学的条件を充足するように生成される。
(もっと読む)
移動ロボット用肢体駆動機構、およびこの肢体駆動機構を用いた移動ロボット
【課題】複雑な制御が不要でありながらも安定した動作が可能であり、また、低コストで製造可能であり、さらに、ロバスト性に優れた移動ロボットと、この移動ロボットに対して適用可能な移動ロボット用肢体駆動機構とを提供する。
【解決手段】移動ロボット用肢体駆動機構20は、複数のサーボモータ24a,24b,24c,24dとリンク機構とを備え、長手方向に伸びる肢体本体部24を回転駆動させるための機構であって、肢体本体部24は移動ロボット10に回転自在な状態で取り付けられ、複数のサーボモータ24a,24b,24c,24dはそれぞれ、互いに平行に配置される出力軸23a,23b,23c,23dを備え、複数のサーボモータの出力軸のうち少なくとも1つはリンク機構に接続して、当該リンク機構を介してサーボモータの出力で肢体本体部24を回転駆動する。
(もっと読む)
歩行状態表示システム等
【課題】対象者の歩行状態を的確に把握可能な歩行状態表示システム等を提供する。
【解決手段】本発明は、歩行にともなう重心変動と脚部の関節角度の変動を計測し、前記計測された重心変動、関節角度の変動、及び歩行によって変化しないユーザの人体情報に基づいて前記ユーザの歩行動作を示す指標を演算し、前記指標を表示する。
(もっと読む)
ロボットの動作生成システム及び動作生成方法
【課題】達成させたい作業の動作を一度で確実に生成可能とし、短時間で動作生成を実行可能とする。また、軌道の計画可能性を保証しつつ、簡単な環境では短時間で軌道計画を可能とする。
【解決手段】複数のアームを備えるロボットの動作生成システムであり、アームの関節軸情報を示すノードと、当該ノード間を接続するエッジと、を有するグラフ構造をアームごとにグラフ構造データ格納部151に格納し、グラフ構造探索処理部154が、各アームに設定された優先度に従って、アームごとのグラフ構造を用いて、スタートノードからゴールノードまでを結ぶ経路を探索し、ノード有効性判定部155が、探索された経路に含まれるノード環境情報と干渉するか否かを判定し、干渉していると判定した場合には、当該ノードをグラフ構造から除外する。
(もっと読む)
外骨格型ロボット
【課題】従来の外骨格型ロボットにおいては、体幹・下肢部の運動支援を適切に行えない。また、電動モータや油圧アクチュエータを用いる事例があるが、大きな負荷を発生するものは装置の自重が大きい。また、負荷を支えるだけの場面においてもアクチュエータがエネルギーを消費するために、エネルギー効率が悪い。
【解決手段】ベースと下半身とを有する外骨格型ロボットであって、左右の足首、左右の膝、および腰の左右の各位置に配置されている能動の関節である能動関節と、能動関節を動作させる制御部とを具備し、能動関節は、エアマッスルと電動モータとを具備する外骨格型ロボットにより、上記の課題が解決できる。
(もっと読む)
歩行ロボットのZMP制御装置
【課題】ファッションモデルのように膝の伸展した優美な2足歩行を実現する2足歩行ロボットのZMP制御装置を提供する。
【解決手段】腰関節を追加して、膝が完全に伸展した場合であっても、腰関節をロール軸周りに回転させることによって右脚を下げ左脚を上げてZMPを右足部に移動させる、あるいは、右足を上げ左脚を下げることによってZMPを左足部に移動させることによって、ZMP制御を可能とし、さらに、ZMP制御の制御遅れを補償するために逆システムあるいはモデルマッチング制御を用いる。
(もっと読む)
ロボットおよび行動制御システム
【課題】第1運動体の運動態様を規範とさせながらも、第2運動体に固有の制約に鑑みて適当な運動態様で当該第2運動体に指定タスクを実行させることができる行動制御システム等を提供する。
【解決手段】本発明の行動制御システム2によれば、人間(第1運動体)およびロボット1(第2運動体)の身体スケールの相違に加えて、ロボット1の構造上または機能上の制約条件が充足されるように規範運動態様{f1(q)}がスケール変換されることにより、ロボット1の目標運動態様{f2(q)}を定める目標内的特徴因子f2(q)が設定される)。さらに、ロボットの目標内的特徴因子f2(q)がスケール逆変換された結果f3(q)に基づき、運動モデルが再定義される。
(もっと読む)
脚式歩行ロボット及びその足軌道決定方法
【課題】アクチュエータへの負荷が過大とならないように脚式ロボットの足軌道を決定する方法を提供する。
【解決手段】本明細書が開示する脚式歩行ロボットの足軌道決定方法は、経路決定ステップと一歩時間決定ステップを含む。経路決定ステップは、足の離地位置から着地位置に至る足の移動経路を決定する。一歩時間決定ステップは、足が離地してから着地するまでに要する一歩時間として、移動経路の長さを足の平均移動速度で除した値を求める。決定された移動経路と一歩時間が足の軌道に相当する。
(もっと読む)
1 - 20 / 552
[ Back to top ]