
Fターム[3C007WC23]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型のその他の特徴、構成 (746) | ロボット本体の構成の特徴 (330) | 脚 (166) | 足首、足平 (69)
Fターム[3C007WC23]に分類される特許
1 - 20 / 69
脚式ロボット、その制御方法、及び制御プログラム
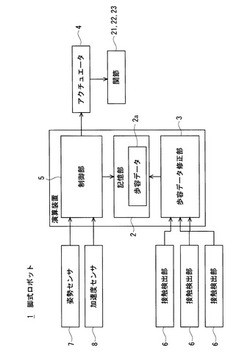
【課題】不整地路面に足部を確実に着地させること。
【解決手段】脚式ロボット1は、胴体10と、胴体10に連結された脚部20と、脚部20の下端に設けられた足部26と、歩容データ2aを記憶する記憶手段と、記憶手段に記憶された歩容データ2aに基づいて、脚部20の関節を駆動制御する制御手段と、足部26の足裏と路面との接触を検出する接触検出手段と、接触検出手段により検出された足部26の足裏と路面との接触位置を中心にして、足部26をロール軸及び/又はピッチ軸周りに回転させ、足部26の足裏の他の部分を路面に接地させるように歩容データ2aを修正する歩容データ修正手段と、を備える。
(もっと読む)
脚式ロボット

【課題】着地時の安定性を向上させた脚式ロボットを提供する。
【解決手段】脚式ロボットは、足裏に配置されたボール20と、ボール20の回転を止めるブレーキ14と、コントローラを備える。ボール20は、足の踵に回転可能に支持されており、一部が足裏に露出している。コントローラは、脚式ロボットが歩行するように脚の動きを制御するとともにブレーキ14を制御する。コントローラは、足が浮いている間はブレーキ14を解放し足12が着地した後にブレーキ14を係合する。ブレーキ14を係合するまではボール20が自由に回転するので足と路面との摩擦抵抗は小さく、ブレーキ14を係合すると摩擦抵抗が大きくなり安定する。
(もっと読む)
二足歩行ロボット
【課題】簡単な構成で人間に近いスムーズな歩行、また外部からの衝撃にも倒れづらい二足歩行ロボットを実現する。
【解決手段】永久磁石4、4A、4B、4Cと鉄板9、9A、9B、9Cをそれぞれ吸着させる。永久磁石4、4Aを取り付けた板5をモーター3によって90度回転させ、永久磁石4は鉄板9からアルミ板8A、永久磁石4Aは鉄板9Aからアルミ板8Aの上にそれぞれスライドさせ、永久磁石4と鉄板9、永久磁石4Aと鉄板9Aによる吸着をとく。その状態からモーター3B、3Cを右足1の底面が床面10と平行に持ち上がるようそれぞれ30度回転させると重心移動を要さずに右足2を持ち上げる事が出来る。右足1を持ち上げた後、モーター3B、3Eを足1が床面10と平行に接するようにそれぞれ30度回転させると前進することができる。
(もっと読む)
装着型動作支援装置
【課題】腰部フレームと、腰部フレームの上部に接続されて装着者の肩に係留される背部フレームと、腰部フレームの下部に接続されて装着者の下肢に係留される下肢フレームとを備えた身体装着型動作支援装置であって、装着者の歩行時に装着者の骨盤の揺動に起因する背部フレームの揺れを抑制することを目的とする。
【解決手段】装着型動作支援装置10に、装着者の左右方向に長尺な基部31を有する腰部フレーム30と、腰部フレーム30の下部に接続される左右一対の下肢フレーム50,50と、腰部フレーム30の基部31の上部に接続される背部フレーム40と、背部フレーム40と腰部フレーム30の基部31とを接続する接続部70とを備える。接続部70は、前額面上の1自由度の回転機構であって、例えば、四節リンク機構で構成される。
(もっと読む)
人間型歩行ロボット用脚とその足
【課題】人間型歩行ロボット用脚と足において、人間の脚や足による動作に類似した動作を実現するとともに人間の足に近いプロポーションを実現し、爪先関節にて異物の巻き込みの抑制を実現する。
【解決手段】能動軸43と第一支軸32aと第四支軸32dと第六支軸32fを4つの節とする第一平行リンク機構と、第二支軸32bと第三支軸32cと第五支軸32eと第六支軸32fを4つの節とする第二平行リンク機構を備え、かつ、第一支軸32aと第二支軸32bと第六支軸32fと仮想支軸を4つの節とする仮想的な平行リンク機構である仮想平行リンク機構を備え、踵側足が床面と接触する足裏面である踵側足裏面は、仮想支軸を含有するとともに仮想支軸を境とする半平面上に構成されるとともに、爪先側足が床面と接触する足裏面である爪先側足裏面は、仮想支軸を含有するとともに仮想支軸を境とする半平面上に構成した。
(もっと読む)
足底機構
【課題】斜面歩行を支援する足底機構を提供する。
【解決手段】足底機構10は、一対の袋体26a、26bと、ソール板14と、流路24と、バルブ22を備える、一対の袋体は、足底の前後に配置されており、膨張収縮が可能である。ソール板14は、一対の袋体の下側に取り付けられており、袋体の膨張収縮に応じて傾きが変化する。流路24は、一対の袋体を連通する。バルブ22は、流路を開閉する。バルブ22は、足底が地面から受ける荷重が予め定められた荷重閾値を下回っている場合には開いており、荷重が荷重閾値を超えた場合に閉じる。バルブ22が開いている間に流体の移動によってソール板14が斜面に合わせて傾斜し、バルブ22が閉じるとソール板14の傾斜が固定される。ソール板14が固定されると、ユーザの足裏を水平に保ち易くなる。
(もっと読む)
脚式移動ロボット
【課題】足首部のコンパクト化が可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、下腿リンク34に設けられ、ピッチの方向に揺動可能な揺動部材52と、下端54aが揺動部材52の前端52bに連結された前側ロッド54と、上端56aが揺動部材52の後端52cに連結され、下端56bが足首関節の揺動軸線より後方にて足平22に連結された後側ロッド56と、前側ロッド54を駆動するアクチュエータ58と備える足首関節駆動機構50を有する。
(もっと読む)
脚式移動ロボット及び揺動構造
【課題】脚式移動ロボットにおいて、ロッドと干渉することなく足首関節を適切に覆うことができる脚式移動ロボットを提供する。
【解決手段】脚式移動ロボット1は、下腿部52R,52Lに固定され、下腿部52R,52Lを覆う下腿カバー52aR,52aLと、ロッド64の外方に位置させて足部53R,53Lに連結された下部カバー82と、足部53R,53Lと共に揺動する揺動部材43cR,43cLにアーム72を介して揺動自在に連結され、且つ下腿部52R,52Lに設けられた上下方向に延びるガイド71に沿って、下腿カバー52aR,52aLと下部カバー82との間を移動自在な上部カバー81とを備える。
(もっと読む)
脚式移動ロボット
【課題】遊脚の着地可能範囲を広くすることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上体4、及び、上体4と上腿リンク30R(L),32R(L)を連結する股関節と、上腿リンク30R(L),32R(L)と下腿リンク34R(L)を連結する膝関節と、下腿リンク34R(L)と足平22R(L)を連結する足首関節とを有し、左右対称の脚体2R(L)を備え、各脚体2R(L)を駆動して移動する。 足首関節はピッチ方向に回転するピッチ回転軸部18R(L)を有し、ピッチ回転軸部ピッチ回転軸部18R(L)の軸線が、左右方向内側が外側より低くなるよう傾斜する。
(もっと読む)
脚式移動ロボット
【課題】遊脚の着地可能範囲を広くすることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上体4、及び、上体4と上腿リンク30R(L),32R(L)を連結する股関節と、上腿リンク30R(L),32R(L)と下腿リンク34R(L)を連結する膝関節と、下腿リンク34R(L)と足平22R(L)を連結する足首関節とを有し、左右対称の脚体2R(L)を備え、各脚体2R(L)を駆動して移動する。股関節はヨー方向に回転する股関節ヨー軸部10R(L)を有し、ロボット1が直進するとき、支持脚となる脚体2R(L)の上腿リンク30R(L),32R(L)が上体4に対して前方斜め外側を向くように、股関節ヨー軸部10R(L)において上体4に対する第1上腿リンク30R(L)のヨー方向の回転角が設定される。
(もっと読む)
二足歩行ロボット
【課題】人間と同様に膝を屈伸させた二足歩行動作を行いつつ、エネルギー消費を抑制することができる二足歩行ロボットを提供すること。
【解決手段】膝屈伸二足歩行ロボット1の台部6が、足本体部5よりも前側に前縁6Cが突出して形成されるとともに、関節部2よりも後側に後縁6Dが突出して形成され、膝伸展時に接地する接地面が先端に形成された突出部12が台裏面に配され、接地面が、接続部7における台部6に対する足本体部5の回転中心よりも後側に配されている。
(もっと読む)
二脚式歩行装置
【課題】大きな歩幅と安定性とを両立させる。
【解決手段】少なくとも3点の接地点を有する右足裏1および左足裏3と、右足裏1から上方側に向かって延びるとともに右足裏1に対して回転接続される右脚2と、左足裏3から上方側に向かって延びるとともに左足裏3に対して回転接続される左脚4と、右脚2のうち右足裏1の反対側部位とを備え、右足裏1は、ジグザグ平面ローラー11の二等辺三角形のうち1つの二等辺三角形の底辺側部位上に位置し、左足裏3は、ジグザグ平面ローラー11の二等辺三角形のうち右足裏1に隣り合う二等辺三角形の底辺側部位上に位置し、ジグザグ平面ローラー11が転がる際に二等辺三角形が順番に接地して進行するように、右足裏1および左足裏3が順番に接地し歩行を実行する。
(もっと読む)
人型歩行ロボット用脚
【課題】人型歩行ロボット用脚において、人の脚、特に女性の脚に近いスリムなプロポーションを実現することにある。
【解決手段】下腿8の上部に配置したモータ13aと直線駆動機構13bとをベルト式伝動機構13dで駆動結合し、下腿8下部に配置したモータ14aと下腿8の左右方向へ延在する中間軸14bとをベベルギヤ組14cで駆動結合し、下腿8に軸線P4周りに揺動可能に支持した関節部材11cに足9を軸線R3周りに揺動可能に支持し、軸線R3上に同軸型減速機14dを配置してその出力要素を足9に結合し、関節部材11cの、軸線P4上から外れた部位と直線駆動機構13bの出力要素13fとをリンク部材13hで連結し、関節部材11cの、軸線P4上の位置に回動可能に支持した中間軸14eと、中間軸14bとをベルト式伝動機構14hで駆動結合し、同軸型減速機14dの入力要素と中間軸14eとをベベルギヤ組14iで駆動結合する。
(もっと読む)
脚式移動ロボットの制御装置
【課題】歩容の制限や関節を駆動するアクチュエータの負荷を緩和することが可能な脚式移動ロボットの制御装置を提供する。
【解決手段】脚式移動ロボットの足平22R(L)は、前後方向に対して交差する鉛直面において曲率が連続する曲底面27R(L)を底部外周面に有する。足平22R(L)の着床から離床までに至る過程において、その足平22R(L)を曲底面27R(L)が接床する方向の軸回りに回転動作させることが可能である。
(もっと読む)
ロボット
【課題】胴体の下部に左右2本の脚部を備え、その脚部の先端に備えた車輪を適切に制御して凹凸路面を安定的に車輪で走行することが可能なロボットの脚部サスペンションを提供することにある。
【解決手段】2足型の倒立2輪走行にて移動するロボットにおいて、凹凸路面を安定して走行するため、各脚先と車輪の間にバネとダンパを備え、バネを懸架する位置をアクチュエータにより可変とすることで各脚先位置を調整可能であり、バネとダンパにより路面の凹凸を吸収し、上半身に搭載されたジャイロでロボットの状態を推定し、アクチュエータを伸縮させて上半身の揺れを収束することを特徴とする脚部サスペンション。
(もっと読む)
脚式移動ロボット
【課題】 構造が簡素であり低コストに足部の爪先部を形成することができる脚式移動ロボットを提供する。
【解決手段】 脚式移動ロボット1は、上体3と、上体3に関節を介して駆動可能に連結される2本の脚部2と、脚部2の先端に関節を介して駆動連結に連結される足部22とを備える。足部22は、足部22の接地端である足平部100を有し、足平部100の爪先110から一定間隔離れた部位に、横全体に亘って爪先部102の厚みより薄い屈曲部112を形成した。
(もっと読む)
脚式移動ロボット
【課題】 構造が簡素であり低コストに足部の爪先部を形成することができる脚式移動ロボットを提供する。
【解決手段】 脚式移動ロボット1は、上体3と、上体3に関節を介して駆動可能に連結される2本の脚部2と、脚部2の先端に関節を介して駆動連結に連結される足部22とを備える。足部22は、足部22の接地端である足平部100を有し、足平部100の爪先110から一定間隔離れた部位に、横全体に亘って爪先部102の厚みより薄い屈曲部112を形成し、屈曲部112は、足平部100の前後方向に所定の幅を有する溝114からなり、溝114は、足平部100の前後方向の幅が爪先部102の後端から前端に向かって爪先部102の中間まで延びて形成されている。
(もっと読む)
脚式ロボット
【課題】片脚立脚時に、遊脚側に傾いたときに立脚でバランスが取り易い脚式ロボットを提供する。
【解決手段】脚式ロボット10は、一方の足リンク20の足裏面30が、脚式ロボットを正面視したときに夫々の足リンク20の足裏面における脚式ロボット10の中心線CLに近い側の縁部31が足裏面30から内側面に向かって円弧状に湾曲している。脚式ロボット10は、片脚で接地しているときに立脚の内側へ傾斜するにつれて、接地している足の足裏面と地面の接点が内側へ移動する。接点が内側へ移動するほど脚式ロボット10を内側へ傾斜させるモーメントが小さくなる。この脚式ロボット10は、内側への傾斜に応じて足裏面と地面の接点が脚式ロボットの内側へ移動するのでバランスが取り易い。
(もっと読む)
ロボット用関節駆動装置及びこれを備えたロボット
【課題】 関節を駆動するためのアクチュエーターの数を最小化できる構造のロボット用関節駆動装置及びこれを備えたロボットを提供する。
【解決手段】 正・逆回転可能に設けられた駆動モーターと、前記駆動モーターと結合され、前記駆動モーターの回転によって相互対向する方向に直線運動する一対の移動部材と、両端が前記一対の移動部材にそれぞれ連結されたワイヤーと、前記ワイヤーに巻かれ、前記ワイヤーの運動によって駆動される関節部とを含む。
(もっと読む)
人型ロボットの足
本発明は足(10)及び、足(10)を使用する人型ロボットに関する。本発明は人の形態学に出来る限り近付いている人型ロボットの製作において、特別な有用性を見出す。
本発明によれば、足(10)は、足の裏(11)と、つま先(12)と、くるぶしから独立した足の裏(11)とつま先(12)との間の回転における動力化された連結部(13)であって、つま先(12)が連結部(13)の軸(14)周りの角度行程に従って動くことができる連結部と、連結部(13)の動力化を可能にするアクチュエータ(19)と、独立式にアクチュエータ(19)を制御する手段とを備える。  (もっと読む)
(もっと読む)
1 - 20 / 69
[ Back to top ]