
Fターム[3C269EF05]の内容
数値制御 (19,287) | プログラムの作成、管理 (3,117) | プログラムの内容 (1,894) | 位置制御用の各種パラメータ (225)
Fターム[3C269EF05]の下位に属するFターム
Fターム[3C269EF05]に分類される特許
1 - 20 / 44
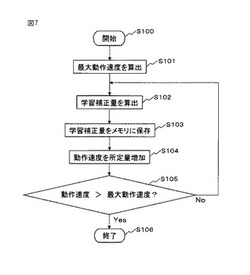
学習制御機能を備えたスポット溶接ロボット
【課題】従来のスポット溶接ロボットは、ロボットの高速動作によって発生する軌跡誤差や振動成分によって、ロボットの最適動作が阻害されるという問題があった。
【解決手段】本発明のスポット溶接ロボットは、制御対象部位とセンサとを備えたロボット機構部(1)と、制御対象部位の目標軌跡または目標位置に関する位置指令データを取得し、位置偏差データに従って、ロボット機構部を所定の動作速度で動作させる動作制御部(4)と、センサの検出結果から制御対象部位の軌跡または位置を算出し、軌跡誤差または位置誤差を補正するための、もしくは振動を抑制するための、学習補正量を算出する学習制御部(3)と、を有し、動作制御部は、学習補正量を用いて位置偏差データを補正し、学習制御部は、学習補正量を算出する過程で、最大動作速度に至るまで1回又は複数回に渡って動作速度を増加させながら学習補正量を算出する、ことを特徴とする。
(もっと読む)
位置制御装置

【課題】フルクローズド位置制御に於いて、送り軸機構部の剛性が低下した場合でも、低周波の振動が発生することなく、安定に動作させる位置制御装置を提供する。
【解決手段】被駆動体の位置検出値Plとモータの位置検出値Pmの差分を入力とした1次遅れ回路17の出力と、モータの位置検出値Pmを加算した位置検出値を位置フィードバック値として使用する位置制御装置において、経年変化補正器30が被駆動体の振動を検出した場合に、前記1次遅れ回路17の時定数Tpが大きくなるように可変することで低周波振動の発生を抑制する。
(もっと読む)
加工シミュレーション装置および数値制御装置
【課題】加工不具合の判別や、加工不具合の発生要因の容易な推定を可能とする加工シミュレーション装置および数値制御装置を得ること。
【解決手段】距離フィールドモデルで表現された加工対象物の形状をシミュレーションする切削シミュレーション部3と、シミュレーション結果から比較対象形状を選択する比較対象選択部4と、シミュレーション結果をグラフィック表示するためのレンダリング処理を実行する形状描画処理部5と、シミュレーション実行制御部2と、を有し、レンダリング処理において、画素が配列された投影面と、投影面上の各画素から投影面に垂直な方向である投影方向に沿う光線と、比較対象形状および光線の交点位置と、を想定するとして、形状描画処理部5は、交点位置において、参照基準形状に対する符号付距離値と、距離フィールドから導出可能な二次的幾何特徴量の差分と、に基づいて画素の輝度値を決定する。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行中に、対象物が検知された場合、視覚サーボ制御を実行する。装置は、この視覚サーボ制御を実行する上で、マニュピュレータの所定の状態に基づいて、視覚サーボ制御係数に含まれる係数の少なくとも一部を変更する(例えば実施形態におけるビジュアルインピーダンス制御の移動処理のステップS32,S33,S36,S37)。
(もっと読む)
位置決め制御系の外乱非干渉化補償装置
【課題】いずれかの駆動体の加減速駆動により発生する外乱が機台を介して隣接する他の駆動体に伝達される装置において、隣接する駆動体から伝達される外乱による駆動体の位置決め精度の悪化の課題を、ソフトウエアの変更又は追加のみで解決できるようにする。
【解決手段】外乱の影響を受ける側の駆動体の観測量に対して外乱の非干渉化補償を行う外乱非干渉化補償器は、外乱発生側の駆動体の操作量ubを入力として、外乱の影響を受ける側の駆動体の観測量xlmに対する該外乱の非干渉化補償を行うためのフィードフォワード補償量ucを出力する第1のフィードフォワード補償器Fn1(s)と、外乱の影響を受ける側の駆動体の操作量Cl(s)の出力を第1のフィードフォワード補償器Fn1(s)の出力で補正する第1の演算器11とを備えている。
(もっと読む)
ロボットシステム
【課題】本発明では、1台のロボット教示装置で複数個の制御グループを操作する場合でも安全に操作対象を動作できるロボット教示装置を提供する。
【解決手段】複数の関節を持つロボットと、複数台の前記ロボット接続し、これらを制御するロボット制御装置1と、前記ロボット制御装置1に接続され、前記ロボットの教示や操作を行うロボット教示装置6から構成されるロボットシステムにおいて、前記ロボット教示装置6上のディスプレイ7の表示状態の変動によって操作の対象となるロボットを自動的に選択するものである。
(もっと読む)
温度ドリフト補正を行う機上計測装置を用いるワークの形状計測方法および機上計測装置を備えた工作機械
【課題】温度ドリフトを補正できる機上計測装置を用いるワークの形状計測方法および機上計測装置を備えた工作機械を提供すること。
【解決手段】機上計測装置を有し数値制御装置で制御される工作機械において、ワークの形状計測方法であって、温度ドリフト補正のための基準点OPをワークWにあらかじめ定め、プローブPrを基準点OPへ移動し、プローブPrの座標系を再設定しプローブPrの温度ドリフトを補正し、計測経路(Path1〜Pathn)に沿ってワークWの形状計測を行い、全ての計測経路の計測終了か否か判断し、終了していなければ最初に戻り処理を継続し、全ての計測経路の計測終了であれば終了し、各計測経路において温度ドリフト補正を行う。
(もっと読む)
数値制御装置
【課題】 仮想機械座標上のクランプ速度が、実機械座標上のクランプ速度より小さくなってしまうことがない数値制御装置を提供する。
【解決手段】 実機械座標と、この実機械座標に対して、設定された回転角度及びシフト量だけ回転及びシフトした仮想機械座標とを有する数値制御装置において、仮想機械座標上で動作している場合、実機械座標上でのクランプ速度を計算し、この計算したクランプ速度に基づいて移動軸の速度を制限する仮想座標制御クランプ速度処理手段905を設けた。
(もっと読む)
位置決め制御装置及びレーザ加工機
【課題】
位置決め時間を短くする位置決め制御装置を提供する。
【解決手段】
モータの位置決め制御を行う閉ループ制御系の位置決め制御装置100であって、モータの目標位置が入力される目標位置入力ブロック1と、モータの実位置及び実速度をフィードバックして、目標位置入力ブロック1に入力された目標位置とモータの実位置との偏差に応じた第一の目標指令信号を生成する制御則A(17a)と、モータの実位置及び実速度をフィードバックして、目標位置とモータの実位置との偏差に応じた第二の目標指令信号を生成する制御則B(17b)と、目標位置に応じて、第一の目標指令信号と第二の目標指令信号とのいずれかをモータに入力するように切り替えるスイッチブロック5とを有し、制御則A及び制御則Bは、閉ループ制御系の極配置が互いに異なるように設定されている。
(もっと読む)
制御装置
【課題】高速移動時においても経路誤差を十分に低減させることができる制御装置の提供。
【解決手段】制御装置1は、位置指令部3と、誤差補正部5とを備える。位置指令部3は、移動機構2を移動させるための位置指令値を出力する。誤差補正部5は、フィードフォワード制御部51と、補償要素算出部52とを備える。フィードフォワード制御部51は、位置指令部3にて出力された位置指令値に基づいて移動機構2をフィードフォワード制御するものであり、補償要素512を備える。補償要素算出部52は、フィードフォワード制御部51における補償要素512に設定される値を位置指令部3にて出力される位置指令値に基づいて算出する。
(もっと読む)
設定支援装置及びコンピュータプログラム
【課題】複雑な動作を制御する場合であっても、ユーザが容易にパラメータ設定を行うことにより動作を制御することができる設定支援装置及びコンピュータプログラムを提供する。
【解決手段】外部機器の動作の種類ごとに設定するべき複数のパラメータを記憶する記憶手段10と、動作の種類の選択を受け付ける動作選択受付手段41と、受け付けた動作の種類に基づいて複数のパラメータを抽出する抽出手段42と、抽出されたパラメータの少なくとも一部のパラメータの入力領域を含む第一の画面を表示する第一表示手段43と、パラメータの選択を受け付けるパラメータ選択受付手段44と、一のパラメータの選択を受け付け、第一の画面のパラメータに基づいて、受け付けたパラメータのパラメータ値を入力する第二の画面を、該パラメータ及び関連するパラメータの入力領域を含めて表示する第二表示手段45とを備える。
(もっと読む)
3軸工具ユニットの制御装置、および加工機
【課題】工具を互いに直交する3方向へ動作させる3つの軸部(X、Y、Z軸メカ)の動的挙動に伴う相互の干渉を補償することができる3軸工具ユニットの制御装置を提供する。
【解決手段】アクチュエータ3と工具ホルダ6と工具7を含むX軸メカ、アクチュエータ4と工具ホルダ6と工具7を含むY軸メカ、およびアクチュエータ5と工具ホルダ6と工具7を含むZ軸メカそれぞれの動的挙動が相互に及ぼす影響を示す伝達関数を用いて、それらX、YZ軸メカそれぞれの動的挙動に伴う相互の干渉を補償するための補正値を演算し、その補正値によりアクチュエータ3、4、5の目標変位量を補正し、その補正された各目標変位量とセンサ8、9、10により測定されたアクチュエータ3、4、5の変位量とを用いてフィードバック制御系によりアクチュエータ3、4、5の動作を制御する非干渉制御部31を備える。
(もっと読む)
サイクルタイム短縮のためのロボットの移動制御装置及び移動制御方法
【課題】面倒な試行錯誤をせずにロボットのサイクルタイムを効率的に短くすることができるロボットの移動制御装置及び移動制御方法を提供する。
【解決手段】移動時間初期値を使用したサイクルタイム(M0+Fc)の方がクランプ処理後のサイクルタイム(Mc+Fc)より短い場合は、新たな移動時間Mnewを計算し、これに基づいて新たな指令速度Vnewを計算する。このようにして得られた移動時間Mnew、指令速度Vnew及び時定数Fcが最終的な移動時間、指令速度及び時定数となり、サイクルタイムの短縮化が図られる。
(もっと読む)
数値制御装置および数値制御方法
【課題】断続的な工具の姿勢変更の指令がある場合や工具の姿勢変化量が不連続な指令がある場合においても、加工プログラムの指令点を変更することなく、工具の先端を滑らかに動作させながら加工を行わせること。
【解決手段】回転軸フィルタ処理部5は、工作機械のパラメータ等にて予め与えられたフィルタ時定数に従って、回転軸の回転角度の補間点13間の角度変化量に対して移動平均フィルタをかけることで、補間点13間の角度変化量を平滑化し、並進軸タイミング合わせ部6は、並進軸の工具先端位置の補間点14間の移動量に対して移動平均フィルタをかけることで、平滑化処理された回転軸の回転と並進軸の移動のタイミングを合致させ、座標変換部7は、並進軸のタイミング合わせ後の工具先端位置16と回転軸のフィルタ後の回転角度15から、工作機械の構成に応じて並進軸の機械位置17へ座標変換する。
(もっと読む)
加工方法及び加工機
【課題】特殊構造に因らず象限切換えに伴う加工精度低下の問題を解決する。
【解決手段】砥石面の断面形状が円弧状になるようにドレス用工具24により砥石車48を加工する方法。(1)砥石車48の一端側から他端側に向かってドレス用工具24を軸方向送りすると共に、砥石車48の径方向中心側から外側に向かって径方向送りすることにより最大径の位置まで砥石車48を加工する工程と、(2)ドレス用工具24を砥石車48から離間させ、その後、径方向送りの送り方向を反転させて砥石車48に対してドレス用工具24を再度接触させる工程と、(3)反転後の送り方向にドレス用工具24を径方向送りすると共に、ドレス用工具24を軸方向送りすることにより、最大径の位置から所定の加工終端位置まで砥石車48を加工する工程と、を連続して実施する。
(もっと読む)
地震情報により工作機械を停止する機能を有する数値制御装置
【課題】地震情報を利用してワークを切削しないブロックでプログラム運転停止や工具の退避を行うことが可能な数値制御装置を提供すること。
【解決手段】数値制御装置1は、地震情報Sigを受信する地震情報受信部A、地震発生の予測時刻での予測実行ブロックを特定する実行ブロック予測部B、地震情報Sigを受信した時に実行中のブロックから予測実行ブロックまでの間に、主軸が停止、あるいは、早送りで工具あるいはワークが移動する運転停止ブロックを特定する運転停止ブロック特定部C、運転停止ブロックの実行開始から実行終了時までの間でプログラム運転の停止を行うプログラム運転停止制御部D、前記プログラム運転停止制御部Dによりプログラム運転が停止した場合、前記工具または前記ワークを退避する退避制御部Eと、の機能を備えている。
(もっと読む)
位置制御装置
【課題】加工精度をより向上でき得る位置制御装置を提供する。
【解決手段】位置制御装置は、位置指令Pcと検出位置Pmとの位置偏差に位置ループゲインKpを乗じて速度指令Vcを算出する位置制御と、速度指令Vcと検出速度Vmとの差分値である速度偏差を求めた後に当該速度偏差と速度ループ比例ゲインPvとの乗算値および当該速度偏差と速度ループ積分ゲインIvとの乗算値を加算してトルク指令Tcを算出する速度制御と、を行なってサーボモータ10を制御することで該サーボモータ10によりボールネジ11を介して駆動される制御対象12の位置を制御する。この位置制御装置は、位置指令Pcの値変化の加加速度を算出する手段16,17,18と、該加加速度の大きさに応じて、位置ループゲインKp、速度ループ比例ゲインPv、および、速度ループ積分ゲインIvの少なくとも一つを可変するゲイン演算部19と、を備える。
(もっと読む)
干渉確認装置
【課題】移動体の移動領域内を撮像して得られる2次元画像データを用い、簡単な処理で正確に移動体と構造体との間の干渉を防止することができる干渉確認装置を提供する。
【解決手段】干渉確認装置1は、Z軸,Y軸及びX軸方向に移動可能な移動体と構造体とを備える工作機械30に設けられており、Z軸方向から移動体の移動領域内を撮像する第1画像生成装置11と、Y軸方向から移動体の移動領域内を撮像する第2画像生成装置12と、X軸方向から移動体の移動領域内を撮像する第3画像生成装置13と、移動体及び構造体の、Z軸,Y軸及びX軸方向から見た輪郭形状に関するデータを記憶する輪郭形状データ記憶部17と、各画像生成装置11,12,13により生成された2次元画像データと、輪郭形状データ記憶部17に格納された移動体及び構造体の輪郭形状データとを基に、移動体と構造体が干渉するか否かを判定する干渉判定部20とを備える。
(もっと読む)
工作機械およびその切削加工方法
【課題】 工具の摩耗を生じる箇所を分散させて、工具寿命を向上させることのできる工作機械および切削加工方法を提供する。
【解決手段】 工作機械本体1と制御装置2とを備える。前記制御装置2は、総切り込み量の入力値分の加工を、複数回のパスで切削するにつき、各パス毎に互いに異なる切り込み量となるように、各パス毎の切り込み量を設定規則27に従って演算する切り込み量演算手段26を備える。この演算された切り込み量で工作機械本体1を制御する演算制御部24を有する。
(もっと読む)
溶接ロボットの制御装置および制御方法
【課題】 溶接ロボットをウィービング動作させて溶接を行なうに際して、高い周波数で溶接線に対して溶接トーチ先端を揺動させて、高速に、かつ安定した溶接を行うようにする。
【解決手段】 ウィービング波66は、溶接すべき両母材61、62間の会合面64に沿った形状の曲面67であって、溶接トーチ先端17aから会合面64までの距離dが略一定となる曲面67に描かれる。コントローラ30は、そのようなウィービング波66でウィービングしながら溶接トーチ先端17aが溶接線Lに沿って移動するように、各軸11〜16を駆動するための駆動指令を生成して、生成された駆動指令を溶接ロボット10に送り、溶接ロボット10を制御する。
(もっと読む)
1 - 20 / 44
[ Back to top ]