
Fターム[3C269MN46]の内容
数値制御 (19,287) | 安全、監視、試験、診断、異常検出 (2,108) | 検出の方法 (1,318) | 画像信号の利用 (48)
Fターム[3C269MN46]の下位に属するFターム
Fターム[3C269MN46]に分類される特許
1 - 20 / 22
数値制御機器のテレビカメラモニター画面での操作方法

【課題】近年、各種の数値制御機器の操作する制御数値の設定は、各種のコンピューターのプログラムによる制御数値の設定においても、瞬時の任意の制御数値の設定操作は困難であつた。
【解決手段】数値制御機器の作業の動作範囲を、テレビカメラで撮影して、そのテレビカメラモニター画面上の位置の数値と、数値制御機器の作業の動作の全ての設定数値を、関連付けて、前もって記録しておき、その関連付けた数値制御機器の作業の動作の設定数値を、テレビカメラモニター画面上の位置の数値で導きだすことで、数値制御機器の制御数値を瞬時に設定することができ、数値制御機器の任意の操作と、高速操作を可能にしたものである。
(もっと読む)
表示装置、表示制御方法、プログラム、およびコンピュータ読み取り可能な記録媒体

【課題】制御プログラムが単純順次実行型であるか状況適応型であるかを問わず、プログラム制御される制御対象装置の特定部位の軌跡を表示可能な表示装置を提供する。
【解決手段】PC10は、制御プログラムの実行結果である一連の位置の指令値を取得する指令値取得部1131と、取得された位置の指令値に対応する、制御周期毎または複数の指定された制御周期における一連の特定部位の位置を求める位置演算部1132と、一連の特定部位の位置の各々を時間の経過順に通る軌跡を示した軌跡データを作成する軌跡データ作成部1133と、軌跡の空間的形態を画像として画面に表示するための画像データを軌跡データを用いて作成する画像データ作成部1134と、画像データを用いて画像を画面に表示させる表示制御部1011とを備える。
(もっと読む)
表示装置、表示方法、プログラム、仮想機構ライブラリ、およびコンピュータ読み取り可能な記録媒体
【課題】制御対象装置ごとに外観を忠実に再現した3次元モデルを用意することなく、ユーザに制御対象装置の動きを理解させることが可能な表示装置を提供する。
【解決手段】PCは、仮想機構の選択肢を提示し、その選択を受け付ける。仮想機構は、複数の機構要素が連動関係をもって組み合わせられており、特定の制御対象装置の形態の模倣ではない抽象化された形態を備えている。仮想機構の選択肢には、機構要素の種類または機構要素同士の連動関係の態様が互いに異なる複数の仮想機構が含まれる。PCは、制御プログラムの実行結果である一連の位置の指令値または実測値を用いて、制御対象装置に指令値が入力される周期毎またはその周期のうち指定された周期における、選択された仮想機構の状態を示した動画を画面に表示する。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】マニュピュレータを対象物まで短時間で移動させること。
【解決手段】対象物であるボルト穴を視認可能なカメラが取り付けられたマニュピュレータを、複数の対象物まで移動させる制御を行う装置が、複数の対象物の各々の位置に対応させて予め設定された目標位置TPi’に向けて、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3)。装置は、マニュピュレータが目標位置TPi’に移動した場合、目標位置TPi’に対応する実穴位置Hiについての実誤差量diを検出する(ステップS5)。装置は、実誤差量d1乃至diの履歴のうち、少なくとも1回分の履歴を用いて、次のi+1回目の目標位置TPi+1’を更新する(ステップS10,S12,S13)。
(もっと読む)
塗装ロボットの教示方法および塗装方法
【課題】 塗装ロボットの動作エラーの発生を抑制することができる塗装ロボットの教示方法、および塗装ロボットの動作エラーの発生を抑制することにより、被塗物を効率よく塗装することができる塗装方法を提供すること。
【解決手段】 自動車ボデー2の三次元データを読み込み、自動車ボデー2の塗装範囲を画成するための基準となる複数の塗装ポイントと、複数の塗装ポイントのそれぞれに対応するコンベヤ値Cvとからなる仮教示点をシミュレーションにより設定し、複数の仮教示点を、コンベヤ値Cvの特定範囲ごとに複数の塗装範囲群に区分する。そして、各前記塗装範囲群におけるコンベヤ値Cvの特定範囲の中間値を算出し、各中間値を、塗装範囲群における塗装ロボット4の動作開始点となるように設定することによって、塗装ロボット4に教示する。そして、その塗装ロボット4を用いて塗装する。
(もっと読む)
ロボットの制御方法
【課題】ワークの状態に応じてロボットの挙動を精度良く制御する方法を提供する。
【解決手段】ワークを移動するロボットの制御方法にかかわる。手部にワークを把持させてロボットを駆動するときの手部の挙動を検出し、複数種類のワークを移動するときのロボットの挙動に関する情報を記憶する学習工程と、ワークの属性を検出する属性検出工程と、ワークの属性と挙動の情報とを用いてロボットの制御条件を設定する制御条件設定工程と、ロボットがワークを移動する移動工程と、を有する。
(もっと読む)
工作機械の加工支援システム
【課題】NCデータや加工状況を適切に評価することが可能となり、工具の折損や加工中の振動などを防止できる工作機械の加工支援システムを提供することを目的とする。
【解決手段】工作機械10の実加工における加工状態を検出する加工状態検出手段20と、加工状態に基づいて、検出された加工状態と当該加工状態の検出時における前記工作物Wの加工位置情報との関連付け情報を記憶する関連付け手段30と、加工状態に応じた表示属性を記憶する表示属性記憶手段40と、関連付け情報および表示属性に基づいて、表示属性に応じた前記工作物Wの前記加工位置情報を表示する表示手段50と、を備える。
(もっと読む)
ツールセンタポイント調整方法
【課題】ツールセンタポイントの座標位置の調整を短時間でかつ効率良く行うこと。
【解決手段】各運動軸C1,C2,C3をツールセンタポイントVPを支点にして円運動させつつ、実際のツールセンタポイントの停止を視認できるまで、各運動軸C1,C2,C3の軸方向におけるツールセンタポイントVPの位置を調整する。
(もっと読む)
加工パラメータ最適化装置、加工パラメータ最適化方法およびプログラム
【課題】工具軸姿勢、及び加工領域を決定すると同時に、いかなる製品形状に対しても剛性の高いツーリングを決定する加工パラメータ最適化装置等を提供する。
【解決手段】工具軸姿勢決定手段21は、一つまたは複数の工具軸姿勢を決定する。干渉危険領域決定手段23は、決定された工具軸姿勢ごとに、加工中に干渉が起こる可能性がある領域を干渉危険領域として決定する。加工シミュレーション手段25は、決定された工具軸姿勢ごとに、干渉危険領域を基にして加工シミュレーションを行い、干渉が起こらない仮想ホルダを生成し、かつ干渉危険領域を避けるように加工領域を決定する。非干渉ツーリング決定手段27は、仮想ホルダに包含され、かつ最も剛性の高い工具とホルダの組合せとなるツーリングを決定する。
(もっと読む)
ワーク位置決め装置、およびワーク位置決め方法
【課題】ワークを所定位置でカットして複数個に分割する際に、短時間の内に効率よくワークを所定の位置に位置決めすることが可能なワーク位置決め装置、およびその方法を提供する。
【解決手段】ワーク1の両側面の位置決めマークMを個別に認識する2つのCCDカメラ7R,7Lと、ワーク1を両側面に沿った一つの直線方向に直線移動可能、かつワークの側面を周回する周方向に沿って回転移動可能に設けられたテーブル4と、両CCDカメラ7R,7Lの内のいずれか一方の画像認識範囲にのみ位置決めマークMが捉えられた場合にはテーブル4を回転移動させるとともに、その回転移動に伴う位置決めマークMの直線方向に沿った移動量を相殺するようにテーブル4を逆方向に直線移動させる制御を行うコントローラ8とを備える。
(もっと読む)
多関節ロボットの測定姿勢ティーチング方法とティーチング治具
【課題】 光学系センサを用いてワークを測定する多関節ロボットに、測定姿勢を正確に教示することができる技術を提供する。
【解決手段】 多関節ロボット10にロッド部38を有するティーチングツール24を装着し、ロッド部38の先端に設けられる先端具50がワーク26の測定位置に接触するように、多関節ロボット10を動作させ、そのときの多関節ロボット10の姿勢を多関節ロボット10に記憶させることで、光学系センサを装着してワーク26を測定する際の測定姿勢を多関節ロボット10に教示する。多関節ロボット10に装着されたティーチングツール24のロッド部38は、多関節ロボット10に装着される光学系センサの測定軸に沿って伸びるとともに、先端具50は、多関節ロボット10に装着される光学系センサの測定距離範囲内に位置している。
(もっと読む)
ワークモデル生成方法、及びそのプログラム
【課題】演算時間の浪費を抑制し、且つ演算エラーを抑制したワークモデル生成方法、及びそのプログラムを提供する。
【解決手段】ワークモデル生成方法は、削り刃によって切削する経路を示す切削経路の外郭部である外郭切削経路を特定する外郭切削経路特定ステップと、外郭切削経路にて囲まれる面を含んで構成される所定厚みの切削ワークモデルを原ワークモデルから削除して加工ワークモデルを生成する加工ワークモデル生成ステップとを備える。このように、外郭切削経路にて囲まれる切削ワークモデルを原ワークモデルから削除して加工ワークモデルを生成するので、切削経路全体について切削ワークモデルを生成する必要がなく、演算時間の遅延を抑制することができる。
(もっと読む)
ロボット軌道制御装置及びロボット軌道制御方法
【課題】少ない計算手数で自動的にロボットの動作経路を改善することができる、ロボット軌道制御装置を得る。
【解決手段】経由点候補決定手段5は、動作可能情報I4が実行可能を指示する際に動作し、経由点の一つを選択経由点とし、選択経由点を含む選択補間動作におけるボトルネック駆動部に関し実行時間が短縮される範囲で経由点候補を決定する動作を行う。一方、動作可能経由点候補探索手段6は、動作可能情報I4が実行不可能を指示する際に動作し、上記ボトルネック駆動部以外の駆動部に関し実行時間が短縮される範囲でロボット装置2が動作可能な第2の経由点候補を決定する動作を行う。経由点変更手段7は、第1の経由点候補を上記選択経由点に替わる変更経由点として決定する。ただし、経由点変更手段7は、第2の経由点候補が存在する場合、第2経由点候補を上記変更経由点として決定する。
(もっと読む)
工具衝突防止装置、工具衝突防止方法、およびNCプログラム
【課題】処理負担が少なく、かつ工作機械の機能を問わず加工動作中における衝突判定を可能する工具衝突防止装置を提供する。
【解決手段】工具衝突防止装置200は、衝突判定に関する開始情報を工作機械に出力させるコードが記述された情報出力ブロック501、502を、衝突判定トリガー部401、402の直前に挿入することにより処理後プログラム500を生成し、工作機械100から開始情報を受信すると、開始情報または定期的に工作機械100から取得する情報により決定された工具の現在位置および移動予定位置と、ワーク102の形状をスキャンすることにより得たワーク102の形状とに基づいて工具101とワーク102との衝突判定を開始し、判定結果に応じた処理を行う。
(もっと読む)
産業ロボットシステムにおける複数軸の制御方法および産業ロボットシステム
本発明は、ロード領域およびプロセス領域を含む作業セルと、人がロード領域に入ったときを検出する検出器(6)と、作業セル内に位置するマニピュレータと、工作物を保持するとともに、マニピュレータが工作物を加工する間に少なくとも1つの軸周りで工作物の方向を変化させるように構成されている少なくとも1つのポジショナと、1つの軸周りで可動であるとともに、コマンドを受け取ると、マニピュレータまたはポジショナをロード領域とプロセス領域との間で移動させるように構成されているステーション交換器とを備える産業ロボットシステムに関する。各軸にはモータ(M1−M3)と駆動ユニット(53−55)とが設けられる。軸コントローラ(50)は、ポジショナおよびステーション交換器の軸に停止を命令する第1のタスクと、ポジショナおよびステーション交換器の軸の動きを可能にする第2のタスクとの間で実行を切り換えるように構成されている。安全コントローラ(58)は、人がロード領域に入っていることを検出すると、ステーション交換器またはポジショナが動いているかどうかを監視するとともに、監視される軸のいずれかが動いていることが検出される場合、動いている軸の駆動ユニットを使用不能にする信号を生成するように構成されている。 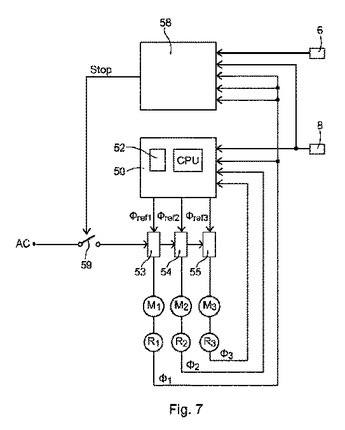 (もっと読む)
(もっと読む)
ロボット制御システムおよびロボットハンド
【課題】ティーチング作業を簡略化でき、ティーチング時間を短縮できるとともに、チョコ停の発生を防止できるロボット制御システムを提供する。
【解決手段】ロボット制御システム1において、ロボットアーム30、40と、ロボットアーム30、40の先端に設けられ、ワーク把持用のチャック部およびワーク撮影用の小型カメラを有するロボットハンド31、41とを備えたロボット3、4と、小型カメラで撮影された画像が表示されるタッチパネルを有し、ロボット3、4に対してティーチング入力を行うためのティーチングペンダントと、ティーチングペンダントでティーチング入力された所定の座標位置を、小型カメラで撮影されてタッチパネルに表示された画像に基づいて補正して、補正された座標位置に移動するようにロボット3、4を駆動制御するコントローラA、Bとを設ける。
(もっと読む)
放射線治療システム
【課題】放射線治療システムにおいて、治療台の干渉を回避して安全性を向上させると共に、治療効率を向上させること。
【解決手段】放射線治療システム10は、治療用放射線を照射する照射ノズル11と、多関節ロボットで構成され且つ患者を乗せて照射ノズル11から照射される治療用放射線の照射位置に患者13の患部を位置決めする治療台12と、照射ノズル11及び治療台12を制御する制御部と、制御部に制御信号を入力する操作装置20と、操作装置20の操作者19の位置を検出する位置検出手段を備える。制御部は、位置検出手段で検出した操作者19の位置を基に当該操作者19との干渉を回避する移動経路を算出する経路算出装置42と、経路算出手段で算出した移動経路を基に治療台12の移動を制御する治療台制御装置42とを備える。
(もっと読む)
工作機械監視装置
本発明は、工作機械(10;82)において使用状況を識別するための識別ユニット(22)を有する工作機械監視装置に関する。前記工作機械(10;82)の少なくとも1つの部品(16;88)を、前記識別ユニット(22)の送信信号および/または受信信号に対する反射器として使用することを提案する。  (もっと読む)
(もっと読む)
工作機械監視装置
本発明は、工作機械(10;116)の使用状況を識別するための識別ユニット(24)を備えた工作機械監視装置に関している。本発明によれば、前記識別ユニット(24)が少なくとも1つの間隔距離パラメータ(42,44,46,82,98;114)を用いて使用状況を識別するように構成されている。  (もっと読む)
(もっと読む)
工作機械監視装置
本発明は、工作機械監視装置に関する。この工作機械監視装置が、超広帯域動作のために設けられている信号ユニット(24;72)を少なくとも1つ有することが提案される。  (もっと読む)
(もっと読む)
1 - 20 / 22
[ Back to top ]