
Fターム[3C269QB17]の内容
数値制御 (19,287) | 演算手段の構成、機能 (558) | プログラム指令の先行処理を行うもの (42)
Fターム[3C269QB17]に分類される特許
1 - 20 / 42
工具背面での切削点指令により加工を行う数値制御装置
数値制御装置
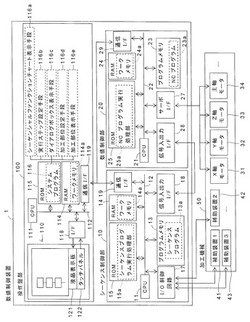
【課題】特定の加工工程の加工部位の再加工を容易におこなうことができるとともに、容易に処理を実装することができる数値制御装置を提供する。
【解決手段】NCプログラム23aは、工程が実行順に記述されるとともに、工程はシーケンシャルファンクションチャート310のステップに対応し、加工機械50を各工程が実行される直前の工程別加工準備完了状態に至らせるための工程別加工準備指令が各工程の前段に記述され、NCプログラム実行手段25aは、実行開始ステップ設定手段116bで設定された実行開始ステップに対応する実行開始工程の前段に記述された工程別加工準備指令までスキップし、実行開始工程に対応する工程別加工準備指令を実行することにより、加工機械50を実行開始工程が実行される直前の工程別加工準備完了状態に至らせた後に、実行開始ステップに対応する実行開始工程からNCプログラム23aを実行する。
(もっと読む)
加工経路におけるコーナ部を加工する制御装置

【課題】二つの主加工経路の間に円弧経路または直線経路が挿入された場合でも、コーナ部を適切に加工する。
【解決手段】加工ノズル(20)とレーザ発振器(22)とを制御する制御装置(10)は、互いに隣接する二つの主加工経路と、主加工経路の両方に連続する一つまたは複数の円弧加工経路または直線加工経路とを加工プログラム(11)から解析する解析部(12)と、二つの主加工経路がなす仮想のコーナ部の角度を算出する算出部(13)と、円弧加工経路または加工経路に対応する二つの主加工経路の間の距離あるいは円弧加工経路などに沿った距離が第一所定値以下であるか、および算出された角度が第二所定値以下であるかを判定する判定部(14)と、直線距離などが第一所定値以下であると共に、角度が第二所定値以下であると判定された場合には、円弧加工経路または加工経路におけるレーザ加工条件を主加工経路のレーザ加工条件から変更する変更部(15)と、を含む。
(もっと読む)
数値制御装置及び制御方法
【課題】工具が被加工物やジグに干渉しない場合のみ工具を待機位置まで工具交換前に移動できる数値制御装置及び制御方法を提供する。
【解決手段】CPUは加工プログラム中に軸移動指令がある場合、主軸ヘッドの軸移動パラメータを算出しRAMに記憶する(S19)。軸移動パラメータは次工具の送り軸毎の最小座標値と最大座標値である。加工プログラム中に工具交換指令がある場合、工具交換前の軸移動を指示するブロックの軸移動パラメータをRAMから取得する(S15)。工具が被加工物又はジグ装置に干渉する領域を示す干渉パラメータは不揮発性記憶装置に記憶されている。干渉パラメータに基づき、軸移動パラメータが非干渉条件を満たすか否か判断し(S16)、非干渉条件を満たす場合(S16:YES)、工具交換前の軸移動指令にポット加工指令を追加する(S17)。
(もっと読む)
コーナ部の許容内回り量による速度制御を行う数値制御装置
【課題】補間前加減速と補間後加減速を併用している場合でも、コーナ部の内回り量を許容内回り量以下にする。
【解決手段】指令解析部10は加工プログラムを解析し実行形式に変換し、補間前加減速部12は速度制御を行い、補間処理部14は補間処理を行い各軸へ移動指令を出力し、各軸用補間後加減速処理部(X軸用補間後加減速処理部16X,Y軸用補間後加減速処理部16Y,Z軸用補間後加減速処理部16Z)は移動指令に対して補間後加減速処理を行い、各軸サーボ(X軸サーボ18X,Y軸サーボ18Y,Z軸サーボ18Z)は補間後加減速処理後の移動指令に基づきそれぞれサーボ制御を行い、位置,速度,電流のフィードバックを行って各軸サーボモータを駆動制御し、補間前加減速部12が許容内回り量によるコーナ部速度計算部20およびコーナ部速度ゼロ保持時間計算部22を備えたコーナ部の許容内回り量による速度制御を行う数値制御装置。
(もっと読む)
数値制御装置
【課題】工作機械において特別指令の入力時点からそれに応じた動作が実行されるまでの応答性を向上しつつ、加工形状の誤差を抑制する。
【解決手段】数値制御装置2は、ツールパスのうち補間対象点の前後に亘る補間区間のみを当該補間対象点における微分値の変化が連続的な変化となるように局部補間するパス局部フィルタ16と、移送対象物の加減速条件と局部補間後ツールパスとに基づいて媒介変数時間関数を求める媒介変数時間関数導出部18と、指令入力装置122に特別指令が入力された場合には、その特別指令の内容に応じて基準単位時間の長さを調整した新たな基準時刻を導出し、その基準単位時間毎の各移送軸についての移送量を求めてその移送量を特定周期毎の指令パルスとするパルス補間部22とを備える。
(もっと読む)
工作機械用制御装置
【課題】工作機械で生じる熱変位量を算出処理する処理負担を軽減するとともに処理速度の低下を回避し、しかもワークの加工精度向上を実現する工作機械用制御装置を提供すること。
【解決手段】逐次解析制御部110、事前解析制御部120、補正値算出部130、変化量算出部140及びモード切換部150を備え、工作機械Mの構成部分に発生する熱変位量に基づいて補正された加工プログラムを実行して工作機械Mを動作させ、ワークWに対する高精度な加工を実現する工作機械用制御装置100。
(もっと読む)
数値制御装置
【課題】加工プログラムに射影工具軸ベクトルの向きが急変するような移送対象物の動きを指示する部分が含まれている場合でも、工具とテーブルとの相対的な急回転を防いでワークの加工精度の低下及び機械ショックの発生を抑制する。
【解決手段】数値制御装置2は、姿勢調整箇所の前後に亘る姿勢調整区間において工具106の姿勢を調整するための姿勢調整情報を求める姿勢調整情報導出部16と、媒介変数時間関数を求める媒介変数時間関数導出部18と、媒介変数時間関数から求めた各時点に対応する媒介変数のうち姿勢調整区間内の媒介変数については、先端パス上の先端点の位置座標と、その先端点から当該先端点に対する位置関係を姿勢調整情報に基づいて射影工具軸ベクトルの向きの変化が緩やかになる方向に調整した上空パス上の上空点へ向かう工具軸ベクトルを求めてその位置座標及び工具軸ベクトルから指令パルスを求める移送指令導出部20とを備える。
(もっと読む)
位置補正装置およびレーザ加工機
【課題】移動装置の位置決め制御の精度の向上と加工速度の向上とを両立できる位置決め装置およびレーザ加工機を提供すること。
【解決手段】座標平面におけるレーザビームBの加工予定軌跡と目標軌跡との間で距離の最も近い2点の組が探索され、その2点間の各々の距離が算出される。算出された各々の距離に基づいて加工予定軌跡を作るための指令が補正されるので、加工予定軌跡を目標軌跡に近づけることができる。これらの処理は被加工物WにレーザビームBを照射する前に実行されるので、レーザ加工時における移動装置の位置決め速度(移動速度)を低下させることなく移動装置の位置決め制御の精度を向上できる。また、変位にヒステリシスをもつピエゾアクチュエータ等の移動装置であっても、ヒステリシスを考慮した補正ができる。
(もっと読む)
ロボット制御システム、ロボットシステム
【課題】制御ハードウェアーへの性能要求を低減できると共に応答性の改善も図れるロボット制御システム、ロボットシステム等の提供。
【解決手段】ロボット制御システムは、ロボット100のフィードバック制御の目標値を出力する目標値出力部60と、力覚センサー10からのセンサー情報に基づいて力制御を行い、目標値の補正値を出力する力制御部20と、補正値により補正された目標値に基づいて、ロボットのフィードバック制御を行うロボット制御部80を含む。力制御部20は、ロボットの姿勢に応じて変化する制御パラメーターを事前計算する事前計算部22と、センサー情報と制御パラメーターとに基づき補正値を求める演算処理を実行する実行部26を含む。
(もっと読む)
数値制御工作機械、制御プログラム及び記憶媒体
【課題】工具交換サイクルを短縮できる数値制御工作機械、制御プログラム及び記憶媒体を提供する。
【解決手段】制御装置のCPUは、加工ブロックの1ブロックを読み込んで解釈する(S1)。このS1の処理では、CPUは、タイミングテーブルを参照して、各指令の内容と、実行タイミングを読み取り、タイミング順に指令の内容を並び替えて、制御装置のRAMに記憶する。CPUは、指令が工具交換指令と判断した場合(S3:YES)、工具交換動作を開始する(S4)。ここで、CPUは、Z軸上昇処理を実行する。Z軸上昇処理は、主軸ヘッドが現在位置から工具交換位置(ATC原点)まで上昇する処理である。主軸ヘッド7がR点まで上昇した場合に(S5:YES)、S1の1ブロック読み取り処理でRAM73に記憶した指令の内容にタイミングAで実行する指令がある場合には(S6:YES)、当該タイミングAで実行する指令の内容を実行する(S7)。
(もっと読む)
ロボット制御装置、ロボット制御方法およびロボットシステム
【課題】ロボットにおける所定の部位があらかじめ定められた位置へ移動したことを示す通知信号の出力を適切に行うこと。
【解決手段】ベクトル算出部が、基準部位置における基準部の移動方向を示す第1のベクトルと、信号出力位置および基準部位置間の相対位置を示す第2のベクトルとを算出するようにロボット制御装置を構成する。また、信号出力判定部が、ベクトル算出部によって算出された第1のベクトルおよび第2のベクトルに基づいて通知信号を出力するか否かを判定するようにロボット制御装置を構成する。
(もっと読む)
送り装置
【課題】サーボロック時の消費電力を削減することができる送り装置を提供する。
【解決手段】送り装置1は、ボールねじ21,ナット23,駆動モータ24,ブレーキ機構25及び制御装置50を備え、移動体13を上下方向に移動させる。制御装置50は、移動体13に関する早送りの移動指令を認識すると、移動体13を現在位置から上方向に移動させる場合には、早送りの移動指令に係る目標移動位置を越えて移動体13を移動させた後、移動方向を反転させて目標移動位置に移動体13を移動,停止させる一方、現在位置から下方向に移動させる場合には、移動体13を目標移動位置に直接移動,停止させるとともに、移動体13を目標移動位置に移動,停止させた後、駆動モータ24によって移動体13の位置を停止位置に維持し、且つブレーキ機構25によって移動体13の移動を制動する。
(もっと読む)
数値制御工作機械
【課題】回転送り軸を有する工作機械の位置と姿勢の誤差を精度良く補正することができる数値制御工作機械を提供する。
【解決手段】直線送り軸及び回転送り軸を有し、計測された誤差データに基づいて移動指令を補正する機能を有する数値制御工作機械であって、誤差データは位置誤差と姿勢誤差とを含む多次元のデータであり、直線送り軸及び回転送り軸の位置及び回転角度に対応した多数の誤差データを収集して作成されたデータテーブルを記憶する誤差データ記憶手段25と、直線送り軸及び前記回転送り軸に対する指令位置と誤差データ記憶手段に記憶された誤差データとから、移動指令を補正する補正データを演算する補正データ演算手段26と、を具備し、姿勢誤差の補正は、姿勢誤差と工具寸法とから工具先端位置の3次元座標値のずれ量を演算し、演算した3次元座標値のずれ量に基づいて回転送り軸を回転させることなく直線送り軸の移動指令を補正する。
(もっと読む)
工作機械の数値制御装置、工作機械の数値制御方法、及び工作機械の数値制御プログラム
【課題】工作機械の急停止、並びにそれにより発生する衝撃を緩和するとともに、減速停止時の工作機械の制御上の機械位置(座標)と実際の機械位置とを整合させることができる、工作機械の数値制御技術を提供する。
【解決手段】停止指令が入力された場合、移動指令バッファ内の出力済みとなっていない残存移動指令から算出した残存移動距離が、減速度Aで減速停止させるのに必要な減速停止距離以下か否か判定し、Noの場合、移動指令バッファ内の移動指令をそのまま出力し、Yesの場合、残存移動指令から減速移動指令を作成して出力する。
(もっと読む)
数値制御装置付き板材加工機の安全運転方法
【課題】ワークのワークテーブルからのオーバーハングを加工プログラムから自動的にチェックしてアラーム表示すると同時に軸移動を停止させ、再起動指令後に加工を再開させることができると共に、加工完了後の原点復帰時にもオーバーハングを自動的にチェックしてアラーム表示すると同時に軸移動を停止させ、2重の運転監視システムによる安全運転を行える数値制御装置付き板材加工機の安全運転方法の提供。
【解決手段】数値制御装置付き板材加工機において、加工プログラムから得られるワークのサイズデータと加工指令値から得られる座標データとから、ワークが板材加工機のワークテーブルからオーバーハングするか否かを演算して求め、オーバーハングする場合にはアラームを表示装置に表示すると同時に、板材位置決め装置の軸移動を停止させ、再起動指令を行ったときに加工を再開させることを特徴とする板材加工機の安全運転方法。
(もっと読む)
工作機械の制御装置
【課題】ワークを加工するに当たり、加工精度を低下させることなく、加工時間を短縮することができる工作機械の制御装置を提供する。
【解決手段】工作機械の制御装置1は、固定サイクルに係る加工プログラムを解析して固定サイクル指令を抽出するプログラム解析部12と、抽出された固定サイクル指令を基に、加工時間に比べ、どの程度加工精度を優先して加工をするかにより複数の等級に分けられた精度レベルを決定し、この精度レベルに対応したパラメータであって、送り機構部30の作動制御に関連したパラメータを設定するパラメータ設定部15と、抽出された固定サイクル指令と設定されたパラメータとを基に送り機構部30を制御する駆動制御部17とを備える。前記パラメータ設定部15は、2つの直線が交差する仮想角部を工具が移動する際の、パラメータに応じた円弧状の移動軌跡を算出して精度レベルを決定する。
(もっと読む)
工具経路の生成方法及び装置
【課題】隣り合う工具経路間で段差を発生せず、滑らかな加工面を得ることができる工具経路の生成方法及び装置を提供する。
【解決手段】加工プログラム20の工具経路を読み出すプログラム読取り解釈部32と、読み出した工具経路上に等間隔で複数の目標点を設定する目標座標値演算部34と、複数の目標点に基づいて工具経路を生成する曲線近似演算部36とを有する。
(もっと読む)
板材加工機のワークホルダ段取り情報表示装置
【課題】 スケジュール運転において、ワークホルダの段取りがあることを作業者に事前に知らせることができる段取り情報表示装置を提供する。
【解決手段】 ワークホルダ13の移動部材13に対する現在の取付位置を記憶するワールホルダ取付位置記憶手段69を設ける。加工スケジュールSHの加工プログラムを先読みし、記述されたワークホルダ13の取付位置の情報を抽出して、上記記憶手段69の情報と比較し、ワークホルダ取付位置の変更が必要となることを示す情報を生成する段取り情報生成手段48を設ける。その情報を表示情報生成手段71により表示装置47に表示させる。
(もっと読む)
工作機械の数値制御装置、工作機械の制御方法、工作機械の制御プログラム
【課題】駆動機構に過度の負担をかけずに連続した2つの移動指令を合成し、移動時間の無駄を防止する。
【解決手段】固定の加速度及び通常等速速度に基づき、工具又はワークを、移動方向と移動量とを移動指令で指示された位置に位置決め制御する数値制御装置において、前回指令の実行速度の演算手順(S145)と、前回指令が減速開始直前かの判断手順(S75)と、今回指令を取り込む手順(S10)と、今回指令が前回指令と同一方向かの判断手順(S40)と、今回指令が通常等速速度に到達できるかの判断手順(S50)と、等速区間速度の変更手順(S55)と、今回指令の実行速度の演算手順(S135)と、演算された前回指令と今回指令のそれぞれの実行速度とを合成する手順(S150)とを備える。
(もっと読む)
1 - 20 / 42
[ Back to top ]