
Fターム[3D034CD20]の内容
操向リンク系及び4WS (6,986) | 4WSの検出(入力信号) (1,597) | その他の検出(入力信号) (106)
Fターム[3D034CD20]に分類される特許
1 - 20 / 106
車両操舵制御システム
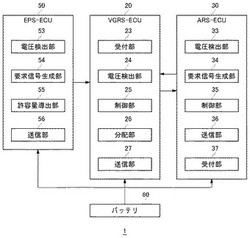
【課題】電力不足の状態が発生した場合に、システム重要度に応じた動作制御を行うことのできる技術を提供する。
【解決手段】EPS−ECU50は、VGRS−ECU20に対して、要求信号を送信する。VGRS−ECU20は、要求信号を受信すると、VGRSアクチュエータの制御を決定するとともに、ARSアクチュエータの制御も決定する。要求信号がアクチュエータの動作停止を要求する場合、VGRS−ECU20は、VGRSアクチュエータおよびARSアクチュエータを、それぞれ動作停止するように制御する。
(もっと読む)
カウンタウエイト台車制御装置

【課題】カウンタウエイト台車の旋回走行時に車輪の旋回半径が大きくなることを抑制し、クレーンの作業効率を向上させる。
【解決手段】カウンタウエイト台車制御装置1は、車輪40の操舵角度θを制御する操舵アクチュエータ50と、操舵アクチュエータ50を制御する制御手段80と、を備える。制御手段80は、上部本体20の旋回方向を判別可能な信号が入力される旋回方向入力手段81を備える。制御手段80は、平面視において、車輪40の位置における車輪40の旋回軌道Cの接線L1よりも車輪40(の前後方向前側)が内側を向くように操舵アクチュエータ50を制御する。
(もっと読む)
後輪トー角制御装置
【課題】左右の後輪のトー角を個々に制御する後輪トー角制御装置において、左右の後輪にコーナリングフォースの偏差が生じた場合にも車両の直進安定性を維持できるようにする。
【解決手段】後輪トー角制御装置10を、車両前後方向の加速度に基づいて左右の後輪5のトー角を共にトーイン若しくは共にトーアウトに制御するECU12と、左右の後輪5のコーナリングフォースを検出するための後輪空気圧センサ13とを備えるものとし、ECU12を、コーナリングパワー判定部26により左右の後輪5にコーナリングパワーの偏差が検出された場合、コーナリングフォース補正量算出部27により算出されたコーナリングフォース補正量(偏差)を低減するように、目標トー角補正部29により左右の後輪5のうち少なくとも一方の目標トー角θtを補正するように構成する。
(もっと読む)
車両操舵装置及びインホイールモータ車両
【課題】操舵軸に改良を加えることにより、ダンパーを追加しても必要以上に大型化することが避けられ、しかも十分大きい回転トルクを伝達できる車両操舵装置を提供することである。
【解決手段】インホイールモータ形式の車輪と、車台に設置された操舵用の駆動装置と、前記駆動装置の出力軸とインホイールモータユニットとの間に介在された操舵軸とからなる操舵装置において、前記操舵軸が、駆動装置側と一体化された内軸25と、モータユニット側と一体化された外軸26により構成され、外軸26に内軸25が軸方向に相対移動可能に嵌合された継手部28が設けられ、前記継手部28の内部に緩衝装置41及びトルク伝達部40が設けられた構成とした。
(もっと読む)
操舵制御装置
【課題】駐車時における操作性を向上させた操舵制御装置を提供する。
【解決手段】操舵制御装置10のECU40は自車両100の左前輪21〜右後輪24の操舵角を制御する。ECU40は、自車両100が駐車枠Pに平行ではないときは、左前輪21、右前輪22と左後輪23、右後輪24との操舵方向が異なる方向である逆相となるように制御する。逆相とすることにより自車両100の方向を変更しやすくなり、自車両100を駐車枠Pに平行にすることが容易となる。また、ECU40は、自車両100が駐車枠Pに平行であるときは、左前輪21、右前輪22と左後輪23、右後輪24との操舵方向が同じ方向である同相となるように制御する。同相とすることにより自車両100の方向を維持しつつ平行に移動させ、自車両100と駐車枠Pとの左右の間隙を調整することが容易となる。
(もっと読む)
電動台車
【課題】積載荷重による走行性能の変動が少なく、転回・斜行・横行の機能を備え舵取りも容易で未熟練者であっても容易に操作することができるパワーアシスト付きの電動台車を提供する。
【解決手段】台車底部の四隅に前輪2と後輪3とを配設し、操作部6を備えた運転制御部5を設け、該運転制御部5により旋回方向及び駆動力を制御される電動駆動輪4を配設した電動台車であって、運転制御部5は電動駆動輪4をパワーアシストするパワーアシスト制御部55と、操作部6に加えられる前後進の操作力を検出するセンサ7と、操作部6による電動駆動輪4の旋回角度を検出する角度センサ8とを備え、前輪2にはこの角度センサ8から出力された信号により前輪2を操舵する操舵機構部10を設け、電動駆動輪4に対し前輪2の同位相及び逆位相への操舵と、前輪2の中立固定の機能を備える。
(もっと読む)
操舵装置
【課題】ロッドの軸方向への移動を規制するためのロッド移動規制機構を備える操舵装置の耐久性を向上すること。
【解決手段】電動モータ10の回転力により軸方向に移動して車両の車輪を操舵するロッド1と、ロッド1の軸方向への移動を規制するロッド移動規制機構と、を備える操舵装置において、ロッド1の軸方向への移動に連動して流れる作動流体の流れを遮断することでロッド1の軸方向への移動を規制する。
(もっと読む)
後輪操舵装置
【課題】旋回軸の損傷を防止すると共に、内部の損傷を検知可能な後輪操舵装置を提供すること。
【解決手段】電動モータの回転力をロッド1の軸方向への移動に変換することによって車両の後輪を操舵する後輪操舵装置100であって、電動モータの回転力をロッド1の軸方向への移動へと変換する変換機構3,5と、ロッド1の軸方向への所定量以上の移動を規制するためのストッパ10とを備え、ロッド1は、ロッド1が軸方向へ移動する際にストッパ10に当接して、ロッド1のストローク量を規定するストローク量規定部12と、ロッド1に過大な軸方向荷重が作用した場合に、ロッド1のストローク量が小さくなるように変形する変形部13とを備える。
(もっと読む)
車両用操舵伝達比可変式操舵装置
【課題】操舵伝達比可変式操舵装置により操舵伝達比が変更された後に操舵装置に残存するオフセットに起因して運転者が操舵操作時に覚える違和感を低減する。
【解決手段】操舵伝達比可変装置14によって操舵伝達比を変更する特定の制御によりオフセットが生じたときには(S180〜200)、特定の制御が終了する際のステアリングホイール20の操舵位置を基準操舵位置とし、基準操舵位置の両側の二つの操舵領域のうちステアリングホイール20の車両直進位置に対しオフセットの側と同一の側の操舵領域を第一の操舵領域とし、オフセットが0であるときの操舵伝達比を標準の操舵伝達比とする。特定の制御の終了後に運転者が第一の操舵領域に於いて操舵操作する場合には(S160)、目標ステアリングギヤ比Rstを標準よりも小さくすることにより(S210)操舵伝達比を標準の操舵伝達比よりも大きくする。
(もっと読む)
車両挙動制御装置
【課題】 運動状態検出センサの故障時等における車両挙動の乱れを抑制した車両挙動制御装置を提供する。
【解決手段】 ヨーレイトFB値設定制御を開始すると、ATTS−ECU16は、ステップS21で実ヨーレイトγrealと規範ヨーレイトγrefとの差Δγを算出する。次に、ATTS−ECU16は、差Δγの絶対値|Δγ|に基づき、ステップS22でヨーレイト差−ゲインマップからヨーレイト制御ゲインGyを検索/設定する。次に、ATTS−ECU16は、ステップS23で実ヨーレイトγrealと規範ヨーレイトγrefとに基づきヨーレイトFBベース値YRbaseを設定した後、ステップS24でYRbaseにヨーレイト制御ゲインGyを乗じることによってヨーレイトFB値YRfbを設定/出力する。
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法
【課題】高μ路側に接地している車輪の低μ路側への移動を抑制し、車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】ヨーモーメント演算部18が、車両がスプリットμ路を走行しているときに、車輪に制動力が発生した場合、左右の車輪間の当該制動力の差によって車両に発生するヨーモーメントを算出する。また、制動時前後輪舵角演算部21が、ヨーモーメントが第1設定値以上である場合には、前記目標ヨーレイトを低減する。さらに、当該ヨーモーメントが第2設定値未満である場合と比較して、目標横減速度を低減する。
(もっと読む)
車両操舵装置
【課題】少なくとも前輪の転舵角及び車速に基づいて左右の後輪舵角を変更可能とする車両操舵装置において、雨天時の後輪タイヤによる泥水の跳ね上げを少なくする。
【解決手段】ワイパ速度センサや雨滴センサの入力信号に基づいて走行中における降雨量を推定する降雨量推定手段と、後輪の目標舵角が、推定降雨量に対応して設定される、許容最大舵角を超えないように制限する補正手段とを備えて、降雨時の後輪の可動角度を制限するようにした。
(もっと読む)
車両運動制御装置
【課題】セルフステア状態が発生しても、実ヨーレートを適正に制御できる車両運動制御装置を提供する。
【解決手段】予め取り決められた規範ヨーレートを目標値として車両に発生する実ヨーレートを制御するダイレクトヨーコントロールデバイスを有し、ステアリング装置にセルフステアが発生すると、規範ヨーレートに替えて、実ヨーレートを抑制するように目標値を設定する。セルフステア状態を原因として発生する実ヨーレートを、一律に抑制して低減させるので、運転者に違和感を与えることのない適正な制御を実ヨーレートに行うことができる。
(もっと読む)
車両制御装置
【課題】後輪転舵装置に温度検出手段を設けずに、後輪転舵装置の過熱を抑制する車両制御装置を提供する。
【解決手段】車両制御装置において、電動パワーステアリング装置は、運転者による操舵量に応じて前輪用モータを駆動し、車両のステアリング機構に操舵補助力を与える。後輪転舵装置は、後輪用モータ68を駆動し、後輪を転舵する。温度センサ30は、前輪用モータ28の温度を検出する。後輪転舵装置は、後輪用モータ68への通電を制御するEPS−ECU56を有する。EPS−ECU56は、温度センサ30の出力にもとづいて後輪用駆動機構への通電量を導出し、温度センサ30で検出した温度が第1の所定値を超えると、後輪用モータ68への通電量を制限する。
(もっと読む)
後輪操舵制御装置
【課題】 後輪操舵車両の挙動が運転者に与える違和感を低減することができる後輪操舵制御装置を提供する。
【解決手段】 自動車Vの左右後輪5L,5Rを操舵制御する後輪操舵制御装置10L,10Rであって、乗員の運転操作と車両の運動状態量との少なくとも一方に基づき、目標後輪操舵量ベース値を設定する目標後輪操舵量ベース値設定部23と、前記車両の運転継続時間に基づき、制御ゲインを設定する制御ゲイン設定部25と、目標後輪操舵量ベース値と制御ゲインとに基づき、目標後輪操舵量を設定する目標後輪操舵量設定部26とを有することを特徴とする。
(もっと読む)
電気自動車の制御装置
【課題】 失陥していない電動モータにより車両の走行を継続できる電気自動車の制御装置を提供する。
【解決手段】 目標駆動力生成部16は、モータの一方が失陥した場合、車両の加速を禁止するフェールセーフ制御を実施し、フェールセーフ制御中に車両が安定走行状態となった場合には、車両の加速を許可するリンプホーム制御へ移行する。
(もっと読む)
電動パワーステアリング装置
【課題】車両挙動制御装置が作動した場合であっても適正な補助操舵トルクを発生し、操舵フィールの悪化を招くことのない電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置10は、補正電流設定部37において、車両挙動を制御するATTS30装置の制御状態に基づく補正電流Icを設定し、目標電流Itに補正電流Icを加算した値に基づいて操舵アシスト用モータ9を駆動制御する。また、電動パワーステアリング装置10は、故障判定部17において、図4に示すマップを用いてモータ実電流Iaと操舵トルクTsとに基づいて故障判定を行い、故障と判定された場合、操舵アシスト用モータ9の駆動制御をリミッタ18により禁止する。ATTS30が作動している場合、禁止領域設定部36は禁止領域補正信号Saを出力して、故障判定部17による故障判定が行われ難くなるように構成する。
(もっと読む)
車両用転舵制御装置
【課題】車両を走行中の車線上から逸脱しにくくすることにある。
【解決手段】自車位置検出手段が、走行中の車線上での車両の車線幅方向の位置を検出し、また操舵方向検出手段1が、ステアリングホイールの操舵方向を検出し、そしてヨー角制御手段3が、ステアリングホイールの操舵方向が車両を走行中の車線上から逸脱させる方向である場合の方が車両を走行中の車線上の車線幅方向目標位置に接近させる方向である場合より、ステアリングホイールの操舵角に対する車両のヨー角変化を小さくすることを特徴とする車両用転舵制御装置である。
(もっと読む)
車輪転舵制御装置
【課題】車輪転舵用アクチュエータの駆動中にその駆動量における変動の検出が中断された場合に、実際の変動量と検出される変動量との間に生じた乖離を解消できる車輪転舵制御装置を提供すること。
【解決手段】車輪転舵制御装置100は、車輪を転舵させるアクチュエータ5の駆動量における相対的な変動量を検出する変動量検出手段10と、変動量検出手段10が検出した変動量に基づいて車輪の転舵量を推定しながら車輪の転舵を制御する車輪転舵制御手段11と、変動量の検出が中断されるか否かを判定する中断判定手段14と、変動量の検出が再開されるか否かを判定する再開判定手段15と、変動量に関する情報を不揮発性記憶媒体に記憶する変動量記憶手段12と、中断前の変動量の推移に基づいて検出再開後の変動量を算出する変動量算出手段13とを備える。
(もっと読む)
舵角制御装置
【課題】ドライバーにとってイメージが容易であり所望の車両挙動を得ることが可能な舵角制御装置の提供。
【解決手段】ドライバーの操舵操作によらず制御により操舵可能な現実の車両の車重m及び/又はヨー慣性モーメントIが、仮想の車両の仮想車重m+md及び/又は仮想ヨー慣性モーメントI+Idと異なるとの条件を満たしつつ、現実の車両をモデル化した現実車両モデル100MRの車両挙動を、仮想の車両をモデル化した仮想車両モデル100MIの車両挙動に一致させ、また横滑り角とヨーレイトとの少なくとも一方を各車両モデル100MR、100MIで一致させるように、現実車両モデル100MRの舵角を算出し、現実の車両の車両挙動を仮想の車両の車両挙動に一致させるように現実の車両の舵角を制御する。
(もっと読む)
1 - 20 / 106
[ Back to top ]