
Fターム[3D037FA26]の内容
補機駆動、推進制御及び安全装置 (4,671) | 推進制御装置・安全装置の入力信号 (984) | 車両の他の部品の状態によるもの (339) | 操向装置 (48)
Fターム[3D037FA26]に分類される特許
1 - 20 / 48
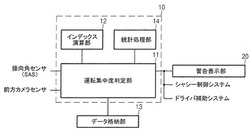
車両運行状態情報基盤の運転集中度判断方法及びそのシステム
【課題】
車両走行中操向角の変化と前方カメラセンサを介し取得された車両運行状態情報に基づきドライバの運転集中度を判定できるインデックスを算出し、その算出結果を統計的な情報に変換してドライバの集中度を判断する車両運行状態情報基盤の運転集中度判断方法及びそのシステムを提供する。
【解決手段】操向ホイールの変位を感知する操向角センサと、前方カメラセンサと、操向角センサと前方カメラセンサから印加される信号を所定の時間間隔で格納すると共に、インデックス演算部により算出された値を累積させ標準値として管理するデータ格納部と、格納されたデータに基づき定量的インデックスを算出するインデックス演算部と、これを統計的に処理して状態情報を出力する統計処理部と、状態情報を算出し、データ格納部に記録された標準値と比べてドライバの運転集中度を判定する運転集中度判定部と、を含んで構成されたことを特徴とする。
(もっと読む)
意識低下判定装置

【課題】運転者の意識低下状態を精度よく判定できる意識低下判定装置を提供すること。
【解決手段】運転者が無操舵状態であるか否かを判定し(S14)、車両の走行車線に対する逸脱危険度が設定値以上であるか否かを判定し(S18)、運転者の操舵量が予め設定される通常操舵量に対し設定値以上掛け離れているか否かを判定し(S22)、無操舵状態であり、逸脱危険度が設定値以上であり、かつ、運転者の操舵量が通常操舵量に対し設定値以上掛け離れていると判定された場合に運転者が意識低下状態であると判定する。逸脱危険度を加味することにより、障害物を避けるような運転操作を意識低下状態であると誤検出することが抑制される。
(もっと読む)
意識低下判定装置
【課題】 無操舵逸脱による不注意状態を精度よく判定することを可能とした意識低下判定装置を提供する。
【解決手段】 道路情報取得手段と車両情報取得手段により、車両が走行している道路の道路情報と車両の走行情報を取得し(ステップS1)、逸脱危険度判定手段が、取得した道路情報、走行情報に基づいて車両の走行レーンからの逸脱危険度MLCを算出し(ステップS2)、判定部は、逸脱危険度MLCが大きく(ステップS3)、かつ、検出した実ヨーレートが小さい場合(ステップS4)に無操舵逸脱状態にあり(ステップS5)、運転者は意識低下状態にあると判定する。
(もっと読む)
ドライバ状態判定装置
【課題】ドライバの意識低下状態を精度よく判定できるドライバ状態判定装置を提供すること。
【解決手段】車両のドライバが意識低下状態であるか否かを判定するドライバ状態判定装置において、接近状態予測値dp(n)が第1閾値A1より大きいか否かを判定し(S16)、大きい場合には接近状態値d(n)が第1閾値A1より大きいか否かの判定を行い(S18)、大きい場合には意識低下判定を行う。また、接近状態予測値dp(n)が第1閾値A1以下の場合は、接近状態値d(n)が第1閾値A1より大きな第2閾値A2を上回っているか否かの判定を行い(S20)、上回っている場合に限り意識低下判定を行う。このように、接近状態予測値dp(n)が小さいときは意識低下の判定閾値を大きくすることにより、車両が一時的に且つ意識的に先行車に近づいた場合における誤判定が抑制される。
(もっと読む)
覚醒度推定装置
【課題】ドライバによるハンドル操作データの周波数特性を取得する際の時間遅れを低減し、短期間の覚醒度低下をも確実に検出する。
【解決手段】現在から過去の25.6秒間のハンドル角データを折り返して未来の25.6秒間のハンドル角データを作成し、この過去の25.6秒の範囲と未来の25.6秒の範囲とを窓関数の区間として、FFT演算を行う。これにより、FFT演算を終了した時点で、窓関数の中心付近のデータすなわち現在付近のデータを重視した覚醒度の推定を行うことができ、過去のデータから周波数成分を算出する従来の手法に比べ、時間遅れの影響を軽減することが可能となる。
(もっと読む)
意識低下判定装置
【課題】未検出や誤検出を抑制することで、運転者の意識低下状態を精度よく判定できる意識低下判定装置を提供する。
【解決手段】予見時間設定部51は、予見時間を0〜4sの間で0.1s刻みで複数設定する。前方偏差演算部52は、運転初期5分間の車両の挙動に対し、複数の予見時間を用いて前方偏差を演算し、各予見時間について、前方偏差と相対操舵角の関係をプロットしたグラフを作成する。最小二乗誤差演算部55は、前方偏差と相対操舵角との最小二乗誤差(前方偏差に対応する操舵角との間の線形性を示す値)を演算し、このような最小二乗誤差を全ての予見時間について演算する。最適予見時間設定部56は、複数の予見時間のうち、最も小さい最小二乗誤差(最も高い線形性を示す値)に対応するものを、最適予見時間として設定する。
(もっと読む)
意識低下判定装置
【課題】車両の走行状態を考慮し車両の逸脱危険度を加味して運転者の意識低下判定を行うことにより、運転者の意識低下状態を精度よく判定できる意識低下判定装置を提供すること。
【解決手段】逸脱危険度MLCの値の保持数が設定数aより大きい場合、かつ、車両Mにおいて操舵がやっと行われて、記憶保持された逸脱危険度MLCが減少する傾向にあると判定された場合、すなわち、操舵が行われず走行車線から逸脱してしまうおそれのある状態からハンドル操作の修正が大きく行われた無操舵後修正過大状態の場合、既に規定された閾値(破線で示された閾値)よりも、所定値(または所定割合)だけ低い値を、この閾値Tに変更して決定する。
(もっと読む)
ドライバ状態判定装置
【課題】ドライバの意識低下状態を精度よく判定できるドライバ状態判定装置を提供すること。
【解決手段】車両のドライバが意識低下状態であるか否かを判定するドライバ状態判定装置において、車両が車両の前方に位置する先行車に接近しているか否かを判定し(S14)、車両のドライバが無操作状態であるか否かを判定し(S18)、車両のドライバが過去所定時間内に運転操作をしたか否かを判定し(S20)、車両が先行車と接近していると判定され、ドライバが無操作状態であると判定され、かつ、ドライバが過去所定時間内に運転操作をしていないと判定された場合に、ドライバが意識低下状態であると判定する。ドライバの過去の運転操作の有無を加味することにより、ドライバの意識的な先行車への接近を意識低下状態であると誤検出することが抑制される。
(もっと読む)
運転支援装置
【課題】ドライバの運転操作による目標走行経路に対する車両の追従性を向上させることができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU6は、車両の目標走行経路を生成する目標経路生成部12と、ドライバの体力を判定するドライバ体力判定部13と、ドライバの体力に応じて、アクセルペダルストロークとアクセルペダルアシスト力及びアクセルペダル反力との関係を表すアクセルペダル入出力特性を設定するアクセルペダル特性設定部15と、ドライバの体力に応じて、ブレーキペダルストロークとブレーキペダルアシスト力及びブレーキペダル反力との関係を表すブレーキペダル入出力特性を設定するブレーキペダル特性設定部16とを有している。
(もっと読む)
車両運転者の運転能力判定方法及びシステム
【課題】本発明の課題は、運転者の視覚範囲、視覚能力を認識できるシステムを用い、運転者の運転能力を的確に判断し、その運転者に合った運転支援モードを決定する車両運転者の運転能力判定方法及びシステムを提供することにある。
【解決手段】視覚範囲Unが左側に偏っている場合、例えば、自転車の判定用画像10dは見えているが、右からの歩行者の判定用画像10eは見えていない場合がある。このような場合、右側からの対象物に対して特に注意を促すように運転支援モードが決定されるようにすればよい。こうすることで、運転者は自分の現在の状態に合った適切な支援を受けることが可能となり、ひいては安全運転へと繋がり、交通事故の防止効果が高まる。
(もっと読む)
運転疲労度判定装置
【課題】車両を運転する運転者の疲労度を判定する精度を高める。
【解決手段】運転疲労度判定装置1は、例えば道路幅が広い道路から狭い道路へ進入した等の運転者の疲労度が蓄積されると想定される場合と、例えば道路幅が狭い道路から広い道路へ進入した等の運転者の疲労度が回復されると想定される場合との双方を考慮し、運転者の疲労度が蓄積されると判定すると、その単位時間あたりの疲労度を現在の累積疲労度に積算する一方、運転者の疲労度が回復されると判定すると、その単位時間あたりの疲労度を現在の累積疲労度から減算する。
(もっと読む)
運転者状態推定装置
【課題】より精度の高い運転者の状態推定を行うことができる運転者状態推定装置を提供する。
【解決手段】運転特性の一である攻撃性について分類された3つのクラス毎に運転者の心的負荷の推定に使用する生体情報である特徴量を設定した。そして当該特徴量を変数として使用する重回帰分析を通じて運転者の心的負荷を演算し、その演算結果に基づき運転者の心的負荷レベルを推定するようにした。運転者の運転特性を攻撃性で識別し、その攻撃性のクラス毎で心的負荷の推定に使用する特徴量を使い分けることにより、運転者の心的負荷の推定精度を向上させることができる。運転特性(攻撃性)のより近い同一のクラスに分類された運転者に適した特徴量が使用されて推定が行われるからである。
(もっと読む)
車両の退避走行制御装置
【課題】車両走行中の緊急時に車両を安全な場所まで退避走行させる際の安全性・ドライバビリティを向上させる。
【解決手段】運転者が操作可能な位置に退避走行スイッチ11を設ける。車両走行中に何等かの緊急事態が発生して運転者が車両を停車させた方が安全だと感じたときに、運転者が退避走行スイッチ11をオン操作すると、退避走行用リレー20と電子スロットル用リレー21がオフされて、車両走行モードが退避走行モードに切り替えられる。これにより、電子スロットル装置18の電源をオフして、スロットル開度を退避走行用スロットル開度まで閉じることで、エンジン17の出力を低下させて、車両駆動力を抑制し、車両を退避走行させる。退避走行中も、エンジン17の運転を継続することで、パワーステアリング装置及びブレーキ装置を運転者がハンドル操作可能で且つ退避走行中のブレーキ力を確保する。
(もっと読む)
車両用故障検出装置、電子制御ユニット、車両用故障検出方法
【課題】誤検知を抑制しながら、信号値が閾値との関係において基準を満たさなくても故障を特定可能な車両用故障検出装置、電子制御ユニット及び車両用故障検出方法を提供すること。
【解決手段】乗員の状態を監視する乗員状態監視手段30と、車両に搭載される制御装置20の故障の兆候を、乗員の状態から検出する故障兆候検出手段32と、予め定められている閾値と制御装置に入力される信号値を比較して故障を検出する故障検出手段35と、故障兆候検出手段が兆候を検出した場合、異常を検出しやすい側に閾値を変更する閾値変更手段38と、を有することを特徴とする車両用故障検出装置100を提供する。
(もっと読む)
電気自動車の車輪スリップ制御装置
【課題】電気自動車の駆動輪がロックする傾向にあるときに、電気自動車の運転状態に応じて駆動輪のスリップを適正に制御するようにした車輪スリップ制御装置を提供する。
【解決手段】車両ECU(24)は、駆動輪(16,18)がロックする傾向にあるときに、電動機(6)をモータ作動または発電機作動に切り換えて制御することにより、駆動輪(16,18)の路面に対するスリップ率を目標スリップ率に近付ける。このとき、ハイブリッド電気自動車(1)が直進運転状態にある場合には、車両ECU(24)が第1スリップ率を上記目標スリップ率とする。一方、ハイブリッド電気自動車(1)が旋回運転状態にある場合には、車両ECU(24)が上記第1スリップ率よりスリップ率の増大側に設定された第2スリップ率を上記目標スリップ率とする。
(もっと読む)
電気自動車の車輪スリップ制御装置
【課題】電気自動車の減速走行時における駆動輪のロック傾向及びロック回復傾向を的確に判定して、駆動輪のロックを防止するようにした車輪スリップ制御装置を提供する。
【解決手段】車両ECU(24)は、駆動輪(16,18)の車輪回転速度(Vw)の変化率である車輪速度変化率(ΔVw)と、駆動輪(16,18)のスリップ率(Sw)とに基づき、駆動輪が(16,18)ロックする傾向にあると判定すると、電動機(6)をモータ作動させて電動機の(6)駆動トルクを駆動輪(16,18)に付与する一方、車輪速度変化率(ΔVw)とスリップ率(Sw)とに基づき、駆動輪(16,18)のロック傾向が解消しつつあると判定すると、電動機(6)を発電機作動させて電動機(6)の回生制動トルクを駆動輪(16,18)に付与する。
(もっと読む)
運転者状態推定装置及び方法
【課題】短時間で運転者状態を推定できる運転者状態推定装置及び方法を提供する。
【解決手段】運転者の心臓の拍動間隔を検出する拍動間隔検出手段16と、車両運転中に発生する運転状態の変化またはこれに関連するイベントを検出するイベント検出手段1と、同じイベントが発生した場合に、前記拍動間隔の変化の有無を判定し、該イベントの発生回数に対する拍動間隔の変化比率を学習する学習手段17と、前記拍動間隔の変化比率が所定比率より大きいイベントを運転者状態判定基準として特定する判定基準特定手段18と、前記運転者状態判定基準として特定されたイベントが発生した場合に、前記拍動間隔の変化の有無に基づいて、前記運転者の状態を推定する運転者状態推定手段19と、を備える。
(もっと読む)
駆動力制御装置
【課題】左右二輪に個別に設けられた電動機のいずれか一方が故障した場合に、車両の挙動変化を抑制すること。
【解決手段】左右二輪3FL,3FRに個別に設けられた電動機4L,4Rのいずれか一方が故障したことが故障検出手段によって検出された場合に、蓄電装置とモータECUとの間の回路を、該回路に介在された電力供給遮断機構7によって電気的もしくは機械的に遮断することにより、モータECUに対する電力供給を遮断する。その結果、モータECUが作動せず、電動機4L,4Rの両方が駆動トルクを発生しないので、車両Veの挙動変化を抑えることができる。
(もっと読む)
クラッチコンプレッサ及び操舵補助ポンプのアッセンブリ並びに該アッセンブリを制御する方法
本発明は、車両(10)であって、駆動軸(14)と、クラッチコンプレッサ(28)と、操舵補助ポンプ(44)とを備え、駆動軸(14)がトルクを第1の駆動装置(16)に伝達し、操舵補助ポンプ(44)が、第1の駆動装置(16)から操舵補助ポンプ(44)にトルクを伝達する被動軸(66)により駆動されている車両に関する。さらに本発明は、車両内の操舵補助ポンプ(44)及びクラッチコンプレッサ(28)を制御する方法に関する。本発明では、別の被動軸(68)が、クラッチコンプレッサ(28)を駆動するために設けられており、この別の被動軸(68)が、原動機(12)により駆動される駆動軸(14)からトルクが伝達される第2の駆動装置(18)に配置されており、この別の被動軸(68)が、第2の駆動装置(18)からクラッチコンプレッサ(28)にトルクを伝達するようになっている。  (もっと読む)
(もっと読む)
運転者疲労度情報出力装置
【課題】運転者の疲労度をより高精度に算出することが可能な運転者疲労度情報出力装置を提供すること。
【解決手段】運転者による方向指示器の操作状態を検出する方向指示器操作状態検出手段と、前記方向指示器操作状態検出手段により検出された操作状態に基づき、前記方向指示器が誤操作された回数を誤操作回数としてカウントする誤操作回数カウント手段と、前記誤操作回数カウント手段によりカウントされた誤操作回数に基づき、運転者の疲労度を算出する疲労度算出手段と、を備え、前記疲労度算出手段により算出された運転者の疲労度に関する情報出力を行なう運転者疲労度情報出力装置。
(もっと読む)
1 - 20 / 48
[ Back to top ]