
Fターム[3D041AB01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、適用車種 (2,040) | 一般車両 (1,682)
Fターム[3D041AB01]の下位に属するFターム
バス、トラック (22)
Fターム[3D041AB01]に分類される特許
361 - 380 / 1,660
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置において、EV走行状態において回転中の変速機の入力軸の動力を利用して内燃機関を始動する場合においてドライバビリティの悪化を抑制できるものを提供すること。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」、並びに、いずれにも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構が備えられる。電動機駆動トルクTmのみで走行するEV走行状態にて内燃機関を始動する場合、クラッチを遮断状態から半接合状態に移行して変速機入力軸の動力により内燃機関の回転速度Neをゼロから増大させる。変速機出力軸が受ける車両減速方向の反トルク(−Te)を考慮して電動機駆動トルクTmを大きくする。
(もっと読む)
隊列走行制御システム

【課題】隊列を構成する各車両の走行性能を反映させた走行制御により、スムーズな隊列走行を実現することができる隊列走行制御システムを提供する。
【解決手段】隊列走行制御システム1は、複数の車両が隊列を形成するように車両の走行制御を行う隊列走行制御システムであって、各車両の加速度指令値u1〜u5は、評価関数Jを最小にするように決定され、評価関数Jは、車両間の相対関係に関する値と、車両ごとにそれぞれ重み付けεu1〜εu5がされた各車両の目標加速度指令値u1〜u5に関する値と、に基づいて算出され、上記重み付けεu1〜εu5は、それぞれの車両の加減速応答性を示す時定数T1〜T5に応じて決定される。
(もっと読む)
車両の動力伝達制御装置
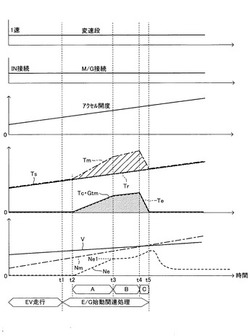
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置において、キックダウン時において電動機接続状態を適切に切り替えること。
【解決手段】この装置は、電動機出力軸の接続状態を、変速機の入力軸と電動機出力軸との間で動力伝達系統が形成される「IN接続状態」、変速機出力軸と電動機出力軸との間で動力伝達系統が形成される「OUT接続状態」、並びに、いずれの間にも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構を備える。キックダウン条件が成立すると(t1)、先ず、変速機減速比を増大する変速作動がなされ(t2〜t3)、その後、電動機接続状態を「M/G出力最大トルク」が増大する接続状態に切り替える切り替え作動がなされる(t4〜t5)。変速作動終了後、E/G側出力トルクTeが増大させられ、切り替え作動終了後、M/G側出力トルクTmが増大させられる。
(もっと読む)
車両の制御装置
【課題】パワーオンアップシフトのイナーシャ相終了時での機関出力トルク増大を適切なタイミングで行うことができ、その出力トルク増大による効果を最大限に得つつ自動変速機の係合要素の摩耗及び車両の加速性能の低下を抑制することのできる車両の制御装置を提供する。
【解決手段】パワーオンアップシフトでのイナーシャ相終了時、予め定められた開始タイミングをもってエンジン2の出力トルク増大を実行することにより、パワーオンアップシフトでの自動変速機3の係合要素の係合が完了するときの同自動変速機3の出力トルクの急速な落ち込み、及びそれに伴う自動車のショックの抑制が図られる。上記出力トルクの増大が行われたとき、上記開始タイミングが適正タイミングよりも早すぎることに起因する上記係合要素の係合の後退が生じている旨判断されると、次回以降の上記エンジン2の出力トルク増大の開始タイミングがより遅いタイミングに更新される。
(もっと読む)
駆動装置
【課題】有段変速機の変速段を変更する際にバッテリへの過大な電力の供給をより確実に抑制する。
【解決手段】変速機の変速段が変更中でないときには第1のキャリア周波数Fhiを用いてPWM信号を設定してモータを駆動するインバータをスイッチング制御し(S110,120,140)、変速機39の変速段が変更されている最中には第1のキャリア周波数Fhiよりも低い第2のキャリア周波数Floを用いてPWM信号を設定してインバータをスイッチング制御するため(S110,130,140)、変速段の変更中はモータの電流の脈動(リプル電流)を大きくして損失を増加させてモータの消費電力が不足するのを防止するから、モータからのパワーが減少した場合であってもバッテリに過大な電力が供給されるのを抑制することができる。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置において、回生トルクによる車両減速中にて回生トルク不足が検出された場合において電動機接続状態を適切に切り替えること。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、及び、動力伝達系統が変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」に選択可能な切替機構が備えられる。電動機回生トルク(−Tm)による車両減速中において「回生トルク不足状態」が検出され(t2)、且つ、電動機接続状態を切り替えた方が「電動機回生最大トルク」がより大きくなる場合、電動機接続状態が切り替えられる(t3〜t4)。且つ、この切り替えに伴って発生する「電動機回生トルクの谷」がE/G減速トルク(−Te)により補償される(t2〜t5)。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置において、車両停止中にてスタータモータを利用せずに内燃機関を始動すること。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、動力伝達系統が変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」、並びに、いずれにも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構が備えられる。車両停止中にて内燃機関を始動する場合、切替機構をニュートラル状態からIN接続状態に切り替え、且つクラッチ機構を遮断状態から接合状態に切り替えた後、電動機駆動力により変速機入力軸が回転駆動される。この変速機入力軸の動力により内燃機関の出力軸が回転駆動された状態で、内燃機関が始動される。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】内燃機関の始動や運転停止が頻繁に行なわれるのを抑制する。
【解決手段】車速変化率ΔVが閾値ΔVref未満でアクセル変化率ΔAccが閾値ΔAref1より大きくなったときや車速変化率ΔVが閾値ΔVref以上でアクセル変化率ΔAccが閾値ΔAref2より小さくなったときには(S140〜S160)、それから所定時間tjrefが経過するまでは運転中のエンジンの運転停止や運転停止中のエンジンの始動は行なわずに走行し(S190,S320〜S400,S250,S260)、所定時間tjrefが経過した以降はアクセル開度Accに応じてエンジンを間欠運転しながら走行する(S210〜S310,S380〜S400)。これにより、エンジンの始動や運転停止が頻繁に行なわれるのを抑制することができる。
(もっと読む)
車両のオートクルーズ装置
【課題】加速中に前方車両が直前に車線変更した場合や、低速走行の前方車両が直前に車線変更した場合でも、車速の急変を生じないオートクルーズ制御となす。
【解決手段】S11で通常のオートクルーズ用の基本加減速度ABを計算する。S12では、隣接車線走行中の左右前方車両が自車線へ車線変更する可能性(車線変更度PL,PR)を演算する。S13では、左右前方車両と自車との間における時間的車間距離(自車が前方車両に到達するまでの時間)TYL,TYRを演算する。S14では、左右前方車両の車線変更度PL,PR、および、左右前方車両との間の時間的車間距離TYL,TYRから、左前方車両を考慮した場合の加速度上限値ALと、右前方車両を考慮した場合の加速度上限値ARとを求め、両者のうちの小さい方を最終的な加速度上限値Aとする。S17では、ABを自車が発生するようアクセルペダルやブレーキ装置を駆動する。
(もっと読む)
走行経路生成装置、走行経路生成方法、及び運転操作支援装置
【課題】適切な走行経路を迅速に出力する。
【解決手段】マイクロコンピュータ9が、障害物Oが取り得る移動軌跡の候補を複数生成し、生成された移動軌跡の各候補について、障害物Oが移動軌跡に沿って動いた場合に自車両1が障害物Oに接触することを回避可能な自車両1の走行経路を算出し、算出された複数の走行経路の中から最適な走行経路を選択する。
(もっと読む)
車両制御装置
【課題】 坂路における車速制御の応答性を高めることができる車両制御装置を提供する。
【解決手段】 各車輪FL,FR,RL,RRに制動力を発生させるホイルシリンダW/Cと、路面の勾配を検出するコンバインセンサ33と、路面勾配に応じた駆動力を演算し、設定された制御目標速度になるように前輪FL,FRに対して駆動力を作用させる速度制御中であって、路面勾配とは別の路面状態(路面μ)に応じて演算された制動力を発生させ、車輪の回転速度を制御する液圧ユニット31と、液圧ユニット31をコントロールするブレーキCU32と、を備えた。
(もっと読む)
車両用制御装置及び車両駆動システム
【課題】アイドルストップ機能を備えた車両において、アイドル停止中のエンジンの引きずりを回避しつつ、エンジンの再始動時における駆動力伝達の応答性を向上させる。
【解決手段】エンジンに駆動連結される入力部材と、車輪に駆動連結される出力部材と、複数の係合要素の係合及び解放が制御されることにより複数の変速段が切り替えられ、入力部材の回転駆動力を各変速段の変速比で変速して出力部材に伝達する変速装置と、を備えた車両用駆動装置を制御するための制御装置。変速装置は、複数の変速段の一つとして、入力部材から出力部材への回転駆動力は伝達し、出力部材から入力部材への回転駆動力は伝達しない変速段である一方向伝達段を備え、アイドル停止状態で、変速装置が一方向伝達段を実現するように制御する制御手段を備える。
(もっと読む)
車両運転支援装置
【課題】擦れや汚れ等のために路面の白線種別を認識できない場合でも、その白線種別を容易に推定して、自律的な車両制御を行えるようにする。
【解決手段】路面状態検出装置1として、リアカメラ6と、自車両の走行車線を区分する白線の種別を認識する白線種別認識部8と、白線種別記憶部9、および白線種別推定部10と、白線種別に基づいて車両制御を行う車両制御装置とを備えている。自車両の現在の走行車線を区分する白線種別を画像処理によりリアルタイムで認識し、その認識した白線種別を走行履歴のかたちで白線種別記憶部9に記憶しておく。白線種別を認識ができないときには、白線種別推定部10が白線種別記憶部9に記憶されている過去の白線種別を現在の白線の種別として推定し、それに基づいて速度制御を行う。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作のための情報を伝達すること。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者に入力される上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して運転者に伝達し、リスク伝達手段が、リスクポテンシャルの大きさに応じて、操作反力付与手段における反力を付与する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、リスクポテンシャル算出手段が、自車両の状態と、自車両周囲の障害物の状態とに基づいて、自車両周囲に存在する障害物に対するリスクポテンシャルを算出し、擬似車両挙動発生手段が、前記リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、前記サスペンション装置を制御することによって擬似的に発生させる。
(もっと読む)
車両挙動制御装置
【課題】 運動状態検出センサの故障時等における車両挙動の乱れを抑制した車両挙動制御装置を提供する。
【解決手段】 ヨーレイトFB値設定制御を開始すると、ATTS−ECU16は、ステップS21で実ヨーレイトγrealと規範ヨーレイトγrefとの差Δγを算出する。次に、ATTS−ECU16は、差Δγの絶対値|Δγ|に基づき、ステップS22でヨーレイト差−ゲインマップからヨーレイト制御ゲインGyを検索/設定する。次に、ATTS−ECU16は、ステップS23で実ヨーレイトγrealと規範ヨーレイトγrefとに基づきヨーレイトFBベース値YRbaseを設定した後、ステップS24でYRbaseにヨーレイト制御ゲインGyを乗じることによってヨーレイトFB値YRfbを設定/出力する。
(もっと読む)
走行環境認識装置および車両制御装置
【課題】 道路形状を精度よく予測できる走行環境認識装置および車両制御装置を提供する。
【解決手段】 車両制御装置は、自車前方走行路の状態を検出する走行路状態検出部9と、走行路状態検出部9の検出結果から少なくとも走行路上の物体の存在を認識する物体認識部10と、物体認識部10の認識結果に基づいて自車前方走行路の道路形状を予測する道路形状予測部8と、自車の走行軌跡を予測する走行軌跡予測部2と、道路形状予測部8により予測された道路の道路端と走行軌跡予測部2により予測された軌跡との交点を演算する交点演算部3と、交点演算部3により演算された交点を目標地点(衝突点)として車両の速度を制御する車両制御部5と、を備える。
(もっと読む)
車両挙動制御装置
【課題】 スラローム走行時等における円滑な制御を実現した車両挙動制御装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS24でベース係数Kbに遅延フィルタ処理を行ってフィルタ係数Kfを算出/設定した後、ステップS25でベース係数Kbとフィルタ係数Kfとを和すことで係数合算値Ksを求める。次に、ATTS−ECU16は、ステップS26で係数合算値Ksが判定閾値Kthより大きいか否かを判定し、この判定がYesであればステップS27で不感帯係数Knを1とする。これにより、駆動力配分制御において制御指示ベース値Dbがそのまま目標駆動力配分制御値Dtgtとなる。なお、判定閾値Kthは、十分に小さな値に設定されている。
(もっと読む)
車両の周辺地上高を検出して作動する安全装置及び周辺地上高検出装置
【課題】 車体の大きな揺れを惹起し得る車両の車輪の脱輪の可能性を事前に検知し、脱輪の予防或いは脱輪時の乗員の早期保護を可能にする装置を提供すること。
【解決手段】 本発明の装置は、走行中の車両の周囲の地面の画像を逐次取得する手段と、少なくとも二つの地面の画像に於いて写っている同一の像の移動量から車両の周辺地上高を算出する手段と、周辺地上高に基づいて車輪が脱輪する可能性の有無を判定する手段とを含み、周辺地上高と現在走行中の路面の高さとの差が所定の高さを越える領域と車両との距離が所定の距離より短くなったときに車輪が脱輪する可能性が有ると判定する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者の上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して、外乱情報を運転者に伝達する制御量を算出する。擬似車両挙動発生手段が、リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、動作制御手段を制御することによって擬似的に発生させるための制御量を算出する。協調制御手段が、情報伝達制御手段によって算出された制御量と、擬似車両挙動発生手段によって算出された制御量とに基づいて、車両を制御する。
(もっと読む)
361 - 380 / 1,660
[ Back to top ]