
Fターム[3D041AB01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、適用車種 (2,040) | 一般車両 (1,682)
Fターム[3D041AB01]の下位に属するFターム
バス、トラック (22)
Fターム[3D041AB01]に分類される特許
301 - 320 / 1,660
車両運転システム
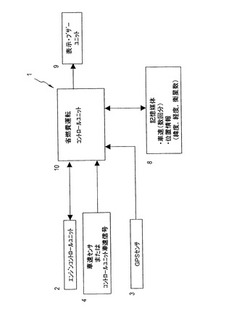
【課題】通常走行時の車両速度を学習し、エンジンが燃料を無駄に消費することを抑えられる車両運転システムを提供する。
【解決手段】車両の位置を検出する車両位置検出手段(GPSセンサ3)と、車両速度を検出する車両速度検出手段(車速センサ4)と、既に走行したことがある経路における車両の速度情報が記憶される記憶手段(記憶媒体8)と、現在の車両の位置における車両速度が記憶されている過去の車両速度の統計値(平均値X)に対して基準値以上に高い車両速度超過領域を判定する判定手段と、車両速度超過領域に入ったことを運転者に知らせる注意喚起手段及び車両速度超過領域にて車両速度を抑える車両速度制御手段の少なくとも一方と、を備える構成とした。
(もっと読む)
車両の制御装置

【課題】駆動輪がスキッドしたと判定されるとき、駆動源の出力トルクの変動を低減して車両の挙動を安定させるようにした車両の制御装置を提供する。
【解決手段】車両に搭載されたエンジンの出力を変速してドライブシャフを介して駆動輪に伝達する自動変速機を備えた車両において、車輪速センサの出力に基づいて駆動輪がスキッドしたか否か判定し(S10)、駆動輪がスキッドしたと判定されるとき、ドライブトレーンから出力される駆動源の出力トルクを算出し、それから予想される車両の第1の走行加速度G1を算出すると共に、車輪速センサの出力に基づいて駆動輪の回転速度から予想される車両の第2の走行加速度G2を算出し(S12からS20)、算出された第1、第2の走行加速度G1,G2に基づいて出力トルクの余剰トルクを算出し(S24)、算出された余剰トルクを除去する(S26からS38)。
(もっと読む)
ハイブリッド自動車
【課題】走行中に所定条件の下で電動走行を行うことで燃費の向上を図ったハイブリッド自動車を提供する。
【解決手段】アクセル開度及びクラッチ回転数に応じてクラッチC、モーターMG及びエンジンEへの燃料噴射量を制御する制御部28を備え、制御部28は、エンジンEの出力がエンジンEに加わるフリクションと釣り合って車輪Tの駆動に寄与しないエンジンノーロード線30と、エンジンノーロード線30に隣接してそれよりもアクセル開度が大きい側に所定範囲で設定された電動走行領域31とが書き込まれた制御マップM1を有し、開度センサ26及び回転センサ27で検出されたアクセル開度及びクラッチ回転数がマップM1の電動走行領域31にあるとき、クラッチCを切り、エンジンEへの燃料噴射量を落としてエンジン回転数を下げ、モーターMGを作動させて車両を電動走行させる。
(もっと読む)
車両制御システム
【課題】自車の進路上の障害物を回避する際に、ドライバの保舵状態の違いによって車両挙動制御装置の制御が影響を受けることを抑制して、障害物回避能力を向上させる。
【解決手段】操舵角に基づいて車両の挙動を制御するEPSコントローラ1、VSAコントローラ2、RTCコントローラ3、及び左右駆動力配分コントローラ4と、自車の進路上の障害物を検知するレーダー装置18と、障害物を回避するドライバの操作を判別して各コントローラを制御する障害物回避制御部5とを有し、この障害物回避制御部が、ドライバの保舵状態が変則的か否かを判別して、保舵状態が変則的である場合には、障害物回避制御中に各コントローラの制御値が増大補正されるように制御する構成とする。
(もっと読む)
車両制御装置
【課題】 減速制御の減速度をドライバが調整できる車両制御装置を提供する。
【解決手段】 車輪に制動力を発生させるブレーキアクチュエータ70と、自車両の前方の環境を検出するカメラ10と、ドライバによるアクセルペダル20の操作状態が加速方向でないとき、環境に応じてブレーキアクチュエータ70を作動させ、あらかじめ設定された基準減速度Accbに応じて車両を減速制御する速度制御コントローラ60と、を備え、速度制御コントローラ60は、速度制御コントローラ60による減速中にアクセルペダル20の操作状態とブレーキペダル30の操作状態とに応じて基準減速度Accbに乗算する減速度補正ゲインKaadjを補正する。
(もっと読む)
先行車追従制御装置および先行車追従制御方法
【課題】 ドライバのブレーキ操作による目標車間距離の変更に伴う車両挙動変化を抑制でき、ドライバに与える違和感を軽減できる先行車追従制御装置および先行車追従制御方法を提供する。
【解決手段】 先行車追従制御装置は、ドライバのブレーキ操作量を検出するブレーキ操作量検出センサ4と、追従制御中に所定量以下のブレーキ操作量が検出された場合、エンジンブレーキによる減速度以下の減速度を発生させる追従制御装置5とを備える。
(もっと読む)
車両制御装置
【課題】 運転者にとってより自然な軌跡を求めることができる車両制御装置を提供する。
【解決手段】 カーブ路における車両の目標走行軌跡を最適化手法に基づいて求める車両制御装置において、そのカーブ路中で目標走行軌跡がカーブ路のレーン内側ラインに最も近接する最近接位置(C/P)がカーブ路通過時間を最短化する場合の最近接位置(C/P)よりカーブ路出口側へ位置させる条件を付加する、具体的には、評価関数にC/Pが後方側へと位置する条件を付加して所望の目標走行軌跡を求める。
(もっと読む)
車両制振制御装置
【課題】適正に制振制御を実行することができる車両制振制御装置を提供することを目的とする。
【解決手段】車両10に搭載された動力源21を制御し車両10のバネ上振動を抑制する制振制御を実行する車両制振制御装置1において、動力源21の運転領域に応じて制振制御の態様を変えることを特徴とする。したがって、車両制振制御装置1は、動力源21の運転領域に応じて制振制御の態様を変えることで、例えば、制振制御と動力源21に関する他の制御との協調を図ることができ、適正に制振制御を実行することができる。
(もっと読む)
車両用制御装置
【課題】 伝達比可変手段の伝達比が1となる前にモータの温度が限界点以上となると、直ちに伝達比をロックするようにしているため、ステアリングホイールの中立位置と直進操舵位置とがずれてしまい、運転者に違和感を与えるおそれがあった。
【解決手段】 前輪転舵アクチュエータに作用する負荷を演算し、前輪転舵アクチュエータに作用する負荷が設定値以上になったときには、横加速度を低下させるようにした。
(もっと読む)
ハイブリッド駆動装置
【課題】エンジン始動後に、エンジンと回転電機との間に設けられるクラッチを完全係合させる際の係合ショックの発生を極力抑制することができるハイブリッド駆動装置を提供する。
【解決手段】クラッチを介してエンジンに駆動連結された回転電機と、エンジン及び回転電機の一方又は双方の駆動力を車輪に伝達する出力部材と、回転電機及びクラッチの動作制御を行う制御装置と、を備えたハイブリッド駆動装置。制御装置は、エンジンが停止され回転電機の駆動力が出力部材を介して車輪に伝達された状態でエンジンの始動要求があった場合に、エンジンの始動完了後にクラッチの解放状態でエンジンの回転速度を上昇させ、エンジンの回転速度が回転電機の回転速度よりも高くなった後に前記クラッチの係合を開始させる。
(もっと読む)
車両の制御装置
【課題】有段変速機の変速過渡期に駆動力保障を確保し、トルク抜けを防止することができる車両の制御装置を提供する。
【解決手段】駆動系に、エンジン1,第2モータジェネレータ5及び駆動輪32,32と、高速段にて締結する摩擦クラッチ7と、低速段にて締結するドグクラッチ8と、を変速要素として有する有段変速機6と、を備え、変速要求時、ドグクラッチ8の断接指令を出力すると同時に、摩擦係合要素7をスリップ締結する変速制御手段を備えた車両の制御装置において、ドグクラッチ8の断接状態を検出するドグクラッチフォーク位置スイッチFを有し、変速制御手段は、ドグクラッチ8を断接するために摩擦係合要素7をスリップ締結するときの摩擦係合要素の油圧目標値Thtと、ドグクラッチ8が実際に断接したときの摩擦係合要素7への油圧指令値Tho*との差に基づいて、次回変速制御時における摩擦係合要素7への油圧指令開始値Thsを補正する。
(もっと読む)
車体傾動制御装置及びその方法
【課題】車体を傾動させる装置が正常でない場合に、車体の姿勢を車両の走行に適合した姿勢にする。
【解決手段】車体傾動制御装置は、車両前後方向に少なくとも2つ配置されそれぞれ、ロール方向に車体を傾動させる車体傾動装置21F,21Rと、車輪を転舵させる運転者の運転操作に応じて、各車体傾動装置21F,21Rを駆動制御する車体傾動装置駆動部25F,25Rと、各車体傾動装置21F,21Rが正常か否かを判定する車体傾動装置異常判定部31と、ロール方向の車体の姿勢を固定する車体傾動停止装置26と、を備え、車体傾動装置駆動部25F,25Rが、車体傾動装置異常判定部31が車体傾動装置21F,21Rの1つが正常でないと判定すると、車体傾動装置異常判定部31が正常と判定した車体傾動装置21F,21Rを駆動制御して、車体の姿勢をロール方向で中立姿勢にし、車体傾動停止装置26が、その中立姿勢に固定する。
(もっと読む)
車両挙動制御装置
【課題】 センサ類に故障が生じた場合においても、過大な目標制御量の出力を抑制できるようにした車両挙動制御装置を提供する。
【解決手段】 制御量ベース値Dbaseの絶対値|Dbase|が配分トルクリミット値Tdlimを継続して超え、ステップS29の判定がYesとなった場合、ATTS−ECU16は、ステップS30で配分トルクリミット値Tdlimを目標制御量Dtgtとして処理を終了する。なお、この際、制御量ベース値Dbaseの値が負であった場合には、トルクリミット値Tdlimに−1を乗じることによって、目標制御量Dtgtの符号を制御量ベース値Dbaseに一致させる。
(もっと読む)
車両の制御装置
【課題】 複数のクラッチを備える変速機構のシフトダウン制御を適切に行い、機関回転数の過剰な増加及びトルクショックを回避しつつ、迅速なシフトダウンを行うことができる車両の制御装置を提供する。
【解決手段】 例外制御選択条件が成立しないときは、クラッチトルクTRQCLに、エンジン回転数制御トルクTRQNEを加算することにより、目標トルクTRQCMDを算出し(S15)、例外制御選択条件が成立し、かつ第1シフトダウンモードが選択されているときは、目標トルクTRQCMDをエンジン回転数制御トルクTRQNEに設定し(S18)、例外制御実行条件が成立し、かつ第2シフトダウンモードが選択されているときは、ドライバ要求トルクTRQDRVにエンジン回転数制御トルクTRQNEを加算することにより、目標トルクTRQCMDを算出する(ステップS17)。
(もっと読む)
車両の制御装置
【課題】パワーモードが選択されている場合と通常モードが選択されている場合とで内燃機関の要求出力が同一となるときであれ、パワーモードが選択されている場合には通常モードが選択されている場合に比べて大きな加速感を得ることのできる車両の制御装置を提供する。
【解決手段】車両は、クランク軸16aの回転駆動力を回転出力軸6に伝達する際の変速比を無段階に変更するMG1を備える。また、HV−ECU30は、アクセル開度ACCPが全開とされるとき、目標回転速度NEtrgまで機関回転速度NEを上昇させる際に、パワーモードが選択されている場合には通常モードが選択されている場合に比べて、機関回転速度NEの上昇速度が大きくなるようにMG1の作動制御を実行する。
(もっと読む)
4輪駆動車のタイヤ力制御装置
【課題】前後駆動力配分制御手段および制動力制御手段を適切に制御することで前後左右全4輪のタイヤ力を最大限活用し、タイヤ限界付近における車両安定性を維持しつつ限界性能を向上させる。
【解決手段】全4輪のうち3輪のタイヤ力が各輪の摩擦円限界値を超えた(飽和した)場合であっても残り1輪でもって3輪トータルのオーバータイヤ力を吸収できる場合は、前後駆動力配分制御部31でもって、左右輪とも飽和している前輪2輪もしくは後輪2輪のオーバータイヤ力の総和だけ飽和していない1輪を有する後輪2輪もしくは前輪2輪に駆動力を移動する。その後、ブレーキ制御部32でもって、各輪のタイヤ力が摩擦円限界値を超えないよう制動力制御する。
(もっと読む)
車両における低速運転方向の特定
【課題】自動縦列駐車システム、前方/後方非常ブレーキシステム、及び他の車両システムでは、車両が走行している方向を知る必要がある。車輪速度センサ情報には累積誤差が生じ、車両移動方向を特定することができない。
【解決手段】低速で走行する車両の運転方向を特定する方法及びシステム。該方法は、車両が以下の3つの状態:(1)車両が上向き傾斜面に位置する上り坂状態、(2)車両が下向き傾斜面に位置する下り坂状態、及び(3)車両が平坦な面に位置する平坦な面状態のうちの1つにあるか否かを判断することを含む。該方法はまた、複数の車両センサから情報を入手すること、並びに、車両の判断された状態及び複数の車両センサからの情報に基づいて、車両の移動方向を特定することも含む。
(もっと読む)
運転支援装置
【課題】ドライバに与える違和感を軽減することができる運転支援装置を提供する。
【解決手段】 運転支援装置1のECU7は、自車両の現在位置と地図データベース13の情報とに基づいて、目標車速設定地点での自車両の目標車速等を演算するパラメータ演算部8と、車速センサ5により検出された車速及び目標車速等に基づいて、自車両の目標減速度を演算すると共に、その目標減速度から減速アシスト制御量の変更回数を決定する目標減速度演算部10と、目標減速度演算部10により求められた目標減速度及び車速センサ5により検出された車速に基づいて、シフト段数及びブレーキ制御量を演算する制駆動配分演算部11と、シフト段数及びブレーキ制御量に応じてシフト及びブレーキを制御する車両制御部12とを有している。目標減速度演算部10は、目標減速度が高いほど減速アシスト制御量の変更回数を少なくする。
(もっと読む)
車両の駆動制御装置
【課題】クルーズコントロールの制御時にも簡単な演算処理により通常制御時と同じ内容の制御入力を通常制御時と同じ制御系の同じ位置(最上流位置)に入力してエンジンのスロットル開度の制御およびトランスミッションの変速制御を行なう。
【解決手段】クルーズコントロールの制御時、擬似アクセルペダル開度演算部93により、目標出力演算部92の目標出力P*に対応する擬似アクセルペダル開度θa*を、特性マップG1、G2と、車速センサ3の検出車速Vとに基づき、目標トルクと回転数の積が目標出力P*となるアクセルペダル開度から逆引き演算して簡単に算出する。さらに、スイッチ8により、制御入力としてのアクセルペダルの開度を、検出アクセルペダル開度θaから擬似アクセルペダル開度θa*に切替え、擬似アクセルペダル開度θa*と検出車速Vとに基づく目標スロットル開度θt*にしたがってエンジンスロットル6を制御する。
(もっと読む)
車両制御装置
【課題】運転者に与える違和感を抑制しつつ、目標値に実際の項目を近づけられる車両制御装置を提供すること。
【解決手段】走行環境あるいは走行条件の少なくとも一方に基づいて運転者に加わる加速度が変化する車両運動に係る項目(加速度)の目標値101を設定する目標値設定手段と、運転者の要求値102を設定する要求値設定手段と、対数値で比較したときの要求値との差が第一の範囲内となる項目の範囲である所定範囲A、および、対数値の変化速度で比較したときの要求値との差が第二の範囲内となる項目の変化速度の範囲である所定変化速度範囲をそれぞれ設定する範囲設定手段と、所定範囲内で項目を目標値に近づけ、かつ、項目の変化速度が所定変化速度範囲内となるように項目の指令値105を設定する指令値設定手段と、指令値に基づいて車両を制御する制御手段とを備え、第二の範囲は、要求値の変化速度に応じて可変に設定される。
(もっと読む)
301 - 320 / 1,660
[ Back to top ]