
Fターム[3D041AB01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、適用車種 (2,040) | 一般車両 (1,682)
Fターム[3D041AB01]の下位に属するFターム
バス、トラック (22)
Fターム[3D041AB01]に分類される特許
241 - 260 / 1,660
車両の協調制御装置
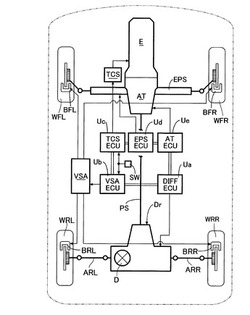
【課題】 横滑り防止装置およびトラクションコントロール装置を協調制御する際に、車両の加速性能および旋回挙動性能の両立を図る。
【解決手段】 横滑り防止装置VSAおよびトラクションコントロール装置TCSを協調制御する協調制御手段が、駆動輪WRL,WRRの車輪速と車体速とを比較して該駆動輪WRL,WRRのスリップ量を算出し、スリップ量が閾値以上の場合にはトラクションコントロール装置TCSを横滑り防止装置VSAに優先して作動させるので、先ずトラクションコントロール装置TCSでスリップ量が過大な状態を解消して旋回挙動制御の制御性を高めることができ、またスリップ量が閾値以上の場合には横滑り防止装置VSAをトラクションコントロール装置TCSに優先して作動させるので、車両の加速性能を最大限に確保しながら横滑り防止装置で旋回挙動を安定させることができる。
(もっと読む)
車両制御システム

【課題】運転者に違和感を与えることを抑制することができる車両制御システムを提供すること。
【解決手段】車両制御システムは、車両に加速度を発生する加速度発生装置(エンジン4、ロックアップクラッチ51、自動変速機52)と、運転者によるアクセルの操作に応じたアクセル開度Paと、車両の車速vとに基づいて加速度発生装置を制御するECU6とを備える。ECU6は、アクセル開度Paと車速vとに基づいた要求加速度に基づいてエンジン4を制御するとともに、アクセル開度Paおよび車速vに基づいた目標クラッチ状態Loおよび目標変速比γoに基づいてロックアップクラッチ51および自動変速機52を制御する。
(もっと読む)
車両の走行安全制御装置
【課題】アクセル全開時において、適切に自動ブレーキ制御の開始を運転者に知らせるとともに、アクセル操作による自動ブレーキ制御解除を可能とすることで、より走行安全性を向上させることのできる車両の走行安全制御装置を提供すること。
【解決手段】衝突予測時間が所定時間以内という条件が成立したとき、まず警告を発し(S1)、このときアクセル全開状態であるときにはアクセル反力を発生させ(S3)、当該アクセル反力に抗してアクセルペダルが踏み込まれた場合には(S4,S6)、自動ブレーキ制御及び警告を解除する(S8)。
(もっと読む)
車両の制御装置
【課題】燃料カットからの復帰時において、混合気の燃焼状態が不安定なときに生じるおそれのあるエンジンストールの発生を抑制することのできる車両の制御装置を提供する。
【解決手段】内燃機関10の出力軸10aは、ロックアップクラッチ機構14を備えるトルクコンバータ11を介してCVT12に接続されている。ECU18は、燃料カットの実行中の機関回転速度が復帰回転速度近傍の速度であってこの復帰回転速度よりも高い一定の速度に維持されるようにCVT12の変速比を制御する。そしてECU18は、燃料カット実行中の機関回転速度及び復帰回転速度を機関水温が低いときほど高い回転速度となるように変更する。
(もっと読む)
車両制御システムおよび車両制御方法
【課題】運転者のアクセル操作量に対する最適な要求値を決定することにより、運転者の感性に即した加速を十分に実現することができる車両制御システムおよび車両制御方法を提案すること。
【解決手段】車両制御システムは、車両に加速度を発生する加速度発生装置(エンジン、T/M)と、運転者によるアクセルの操作に応じたアクセル開度Paと、車両の車速vとに基づいて加速度発生装置を制御する車両制御装置とを備える。車両制御装置は、一定アクセル開度における速度と加速度との関係により定められたアクセル一定時加速度を条件とするアクセル開度Paと要求加速度Gxとの関係に基づいて決定された要求加速度Gxに基づいて加速度発生装置を制御する。
(もっと読む)
ハイブリッド電気自動車の発進制御装置
【課題】走行用動力源の電動機を用いたエンジン自動始動後に発進変速段への切換操作に起因する遅れを生じることなく迅速に車両を発進できるハイブリッド電気自動車の発進制御装置を提供する。
【解決手段】停車状態からの車両発進時においてエンジン1が自動停止されているとき、第1歯車機構G1をニュートラル状態にすると共にアウタクラッチ21を接続して電動機2によりエンジン1を始動する一方、第2歯車機構G2を第3速に切り換えてインナクラッチ22を接続し、この第3速を介してエンジン1の駆動力で車両を発進させることにより、第1歯車機構G1をニュートラル状態から発進変速段である第2速に切り換えることによる遅れを防止する。
(もっと読む)
減速支援システム
【課題】車両の運転者の意図に沿った減速支援制御を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が交差点に進入することを検知する第1検知手段(109)と、車両が交差点に進入した際に、減速制御開始条件が成立したことを条件に、減速支援制御を行う第1減速支援手段(109)と、車両が交差点を右折又は左折するか否かを判定する右左折判定手段(109)とを備える。車両が交差点を右折又は左折すると判定された場合、第1減速支援手段は、車両の運転者が、車両を右折又は左折させるためにハンドルを操舵した方向とは反対方向にハンドルを操舵し始めたタイミングで、減速支援制御を終了する。他方、車両が交差点を右折又は左折しないと判定された場合、第1減速支援手段は、運転者が、アクセルオフからアクセルオンにしたタイミングで、減速支援制御を終了する。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置のカーブ路入口走行時の誤動作を抑制する。
【解決手段】レーダーで検出した車両前方の停止物ターゲットが自車線内に所定時間以上存在することを、該停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識する条件としたものにおいて、自車のヨーレート(車両の旋回方向への回転角の変化する速度)の単位時間当たりの変動量が所定閾値以上であるときは、カーブ路入口を走行していると判断し、前記所定時間を計測するためのタイマをリセットすることにより、停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識することを禁止する。
(もっと読む)
車両制御装置
【課題】死角から物体が出現した場合であっても適切な走行支援を行うことのできる車両制御装置を提供する。
【解決手段】物体認識部16は、物体の存在の確からしさを示す確信度を演算することによって、物体検出部3によって検出された物体の認識を行う。また、物体認識部16は、検出された物体が死角から出現した物体であると判定した場合、通常時に比して確信度を増加するように演算する。物体認識部16は、確信度が通常時に比して増加するように演算することができるため、死角から急に出現した物体に対しては、物体検出部3での検出から認識するまでの間に要する時間を短くすることができる。認識するまでの時間を短くすることによって、その後の処理を早期に行うことが可能となるため、死角から急に出現した物体に対しても十分な時間を確保して適切な走行支援を行うことができる。
(もっと読む)
車両制御装置
【課題】運転者の違和感を低減してドライバビリティを向上させる。
【解決手段】本発明の車両の制御装置40は、運転者により所定の加減速操作がなされているか否かを判定する加減速判定部61と、動力伝達経路のうち遊びのある係合部分36a,37aに対して動力伝達上流側にある入力軸24と、係合部分36a,37aに対して動力伝達下流側にある出力軸28との相対回転位置X及び相対回転速度Vの少なくとも一方の値を検出する動力伝達状態検出部62と、加減速判定部61により前記加減速操作がなされていると判定された場合には、動力伝達状態検出部62により検出された値に応じて、動力伝達部材36,37間の接触速度及び伝達トルクの少なくとも一方が小さくなるように入力軸24又は出力軸28を加減速させる加減速制御を実行する加減速制御部63とを備えている。
(もっと読む)
走行支援装置
【課題】死角がある場合に適切な適正車速を設定する走行支援装置を提供することを課題とする。
【解決手段】車両に搭載される走行支援装置であって、車両前方の死角領域を検出する死角領域検出手段と、死角領域検出手段で検出した死角領域を減少する走行領域を検出する走行領域検出手段と、走行領域検出手段で検出した走行領域での適正車速を設定する適正車速設定手段を備えることを特徴とし、適正車速設定手段は、周辺環境に応じて適正車速を変更すると好適である。
(もっと読む)
車両運動制御装置
【課題】加減速が不要なシーンで、横運動に連係した前後加速度制御の介入を抑制し、走行シーンに対するロバスト性を向上させることができる車両運動制御装置を得ること。
【解決手段】自車両情報取得手段1により検出したドライバ入力情報等に基づいて車輪制駆動トルクアクチュエータ3やブレーキランプ4を制御する車両運動制御演算手段2は、車両に横運動を発生させる操舵操作情報、もしくは車両に発生した横運動情報の少なくとも一つに基づいて車両に発生させる前後加速度指令値を演算する前後加速度指令値演算部7と、前記操舵操作情報および前記横運動情報に基づいて前記前後加速度指令値を補正する前後加速度指令値補正演算部8を備える。
(もっと読む)
変速制御装置
【課題】この発明は、エンジンと自動変速機の同調性を確保すること、通信する他の制御装置との通信を不都合なく両立することを目的とする。
【解決手段】この発明は、変速制御装置において、エンジン水温検出手段によって検出されたエンジン水温と変速機油温検出手段によって検出された変速機油温とを入力可能に設け、エンジン水温−変速機油温に基づく遅延時間のマップを、セレクタ装置で人為的に選択されたシフトポジションの変更パターンのうちニュートラルレンジ−前進レンジとニュートラルレンジ−後退レンジとにそれぞれ予め設定し、セレクタ装置で実際に人為的に選択されたシフトポジションの変更パターンと検出されたエンジン水温と変速機油温とから遅延時間をマップで設定した際には、セレクタ装置からの出力信号の情報を設定された遅延時間だけ遅延して他の制御装置のうちのエンジン制御装置に通信するよう制御することを特徴とする。
(もっと読む)
車両制御装置
【課題】車両が右折又は左折する際に、運転者に違和感を与えることなく、適切に加減速を支援する。
【解決手段】車両の制御装置(10)は、車両(1)の走行環境を取得する走行環境取得手段(101、102、103、104、105、111)と、取得された走行環境に基づいて、車両が交差点への進入地点から退出地点へ至るまでに必要な走行距離を推定する走行距離推定手段(109)と、推定された走行距離に応じて、車両の駆動力及び制動力の少なくとも一方を制御する制御手段(109)とを備える。
(もっと読む)
制駆動力制御装置
【課題】カーブ走行時における車両の走行状態を運転者の感覚に沿ったものとすることができる制駆動力制御装置を提供すること。
【解決手段】カーブ走行時の車両の制駆動力を制御する制駆動力制御装置であって、カーブの入口側において車両に前後方向の減速度が作用した状態で旋回を開始した後の減速時に、車両に作用する横加速度と前後方向の減速度とが予め設定された第一の関係となるように制駆動力を制御(S90)可能であり、第一の関係は、入口側において旋回を開始したときに車両に作用している横加速度および前後方向の減速度に基づく。制駆動力の制御を実行するか否かは、過去のカーブ走行時に運転者が運転操作をして車両に作用した横加速度と前後方向の減速度との関係である第二の関係に基づき判定される(S60)。
(もっと読む)
オートバイに対して働く左右方向の力の削減のための方法及び装置
【課題】オートバイのカーブ走行の際に、後輪の横滑り、オートバイは棒立ち(ハイサイダー)を防ぐ制御装置及び方法を提供する。
【解決手段】カーブ走行の間にオートバイの後輪が左右方向にスリップする不安定な状態を後輪のスリップ角、操舵角、車体の傾斜状態、加速度、後輪のホイールスリップ等の変化度により検知して、ハイサイダーの危険が検知されると、ドライバーがその様な状況でエンジントルクを絞っても、エンジントルクの低下が自動的に制限される。
(もっと読む)
道路形状検出装置、走行制御装置、及び道路形状検出方法
【課題】認識しているカーブ数のハンチングを抑制する。
【解決手段】各カーブ区間の入口補間点について、演算周期における前回の演算結果と比較し、カーブ区間数が変動しているか否かを判定し(ステップS5)、カーブ区間数が変動していたら、前回のカーブ情報と自車両の移動量とに基づいて、今回のカーブ情報を補正する(ステップS6)。先ず、カーブ区間が減少しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ増加させる。一方、カーブ区間が増加しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ減少させる。すなわち、今回のカーブ情報を、前回の配列に戻す補正を行うことで、前回のカーブ区間数を保持する(ステップS62)。
(もっと読む)
車両挙動制御装置
【課題】運転者への違和感が小さくできる車両挙動制御装置を得る。
【解決手段】ハンドルの操舵角を検出又は推定する操舵角検出手段と、車両の速度を検出する車速検出手段と、操舵角検出手段の出力である操舵角の0近傍に制御不感帯を有し、操舵角検出手段の出力である操舵角に対して、低車速側では制御不感帯幅を大きく、高車速側では制御不感帯幅を小さく設定し、車速検出手段の出力である車速に応じた制御不感帯幅を出力する制御不感帯幅設定器と、操舵角検出手段の出力である操舵角の絶対値が制御不感帯幅設定器の出力である制御不感帯幅で設定される操舵角の絶対値の上限より大きい場合に車両の減速制御用出力を発生する車両減速制御実施判断器とを備え、車両減速制御実施判断器の前記減速制御用出力により車両の減速制御を実施する
(もっと読む)
ハイブリッド車およびその制御方法
【課題】アクセル開度が所定開度未満の状態から所定開度以上の状態に変更されて排気の吸気系への再循環であるEGRを停止するときに内燃機関の排気を浄化する浄化触媒が過熱されるのをより抑制する。
【解決手段】アクセル開度が所定開度未満の状態から所定開度以上の状態に変更されたときには、エンジンから要求パワーP2が出力されるまでは燃費優先時動作ラインを用いてEGRを伴ってエンジンを運転し(ポイントA→ポイントB)、エンジンから要求パワーP2が出力された以降はエンジンが高トルク要求時動作ライン上で運転されるまでエンジンから要求パワーP2が出力される状態を保持してエンジンの回転数NeおよびトルクTeを高トルク要求時動作ライン上に向けて変更する(ポイントB→ポイントC)。
(もっと読む)
走行支援装置
【課題】追従走行制御を行う際、自車両の無駄な加減速を低減し、燃費を向上させる。
【解決手段】走行支援装置は、先行車両の走行状態と先先行車両の走行状態とに基づいて、先行車両と先先行車両との間の車間距離が拡大傾向である否かを判定し、車間距離が拡大傾向であると判定した場合には、自車両の車両速度が先行車両の車両速度よりも高くなるように、自車両の加減速度を制御する制御手段(10)を備える。
(もっと読む)
241 - 260 / 1,660
[ Back to top ]