
Fターム[3D041AD47]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 車両外部状況 (949) | 道路状態 (548)
Fターム[3D041AD47]に分類される特許
121 - 140 / 548
車両の周辺地上高を検出して作動する安全装置及び周辺地上高検出装置
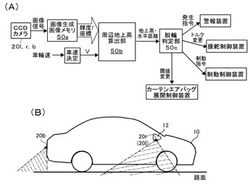
【課題】 車体の大きな揺れを惹起し得る車両の車輪の脱輪の可能性を事前に検知し、脱輪の予防或いは脱輪時の乗員の早期保護を可能にする装置を提供すること。
【解決手段】 本発明の装置は、走行中の車両の周囲の地面の画像を逐次取得する手段と、少なくとも二つの地面の画像に於いて写っている同一の像の移動量から車両の周辺地上高を算出する手段と、周辺地上高に基づいて車輪が脱輪する可能性の有無を判定する手段とを含み、周辺地上高と現在走行中の路面の高さとの差が所定の高さを越える領域と車両との距離が所定の距離より短くなったときに車輪が脱輪する可能性が有ると判定する。
(もっと読む)
車両制御装置

【課題】 坂路における車速制御の応答性を高めることができる車両制御装置を提供する。
【解決手段】 各車輪FL,FR,RL,RRに制動力を発生させるホイルシリンダW/Cと、路面の勾配を検出するコンバインセンサ33と、路面勾配に応じた駆動力を演算し、設定された制御目標速度になるように前輪FL,FRに対して駆動力を作用させる速度制御中であって、路面勾配とは別の路面状態(路面μ)に応じて演算された制動力を発生させ、車輪の回転速度を制御する液圧ユニット31と、液圧ユニット31をコントロールするブレーキCU32と、を備えた。
(もっと読む)
車両運転支援装置
【課題】擦れや汚れ等のために路面の白線種別を認識できない場合でも、その白線種別を容易に推定して、自律的な車両制御を行えるようにする。
【解決手段】路面状態検出装置1として、リアカメラ6と、自車両の走行車線を区分する白線の種別を認識する白線種別認識部8と、白線種別記憶部9、および白線種別推定部10と、白線種別に基づいて車両制御を行う車両制御装置とを備えている。自車両の現在の走行車線を区分する白線種別を画像処理によりリアルタイムで認識し、その認識した白線種別を走行履歴のかたちで白線種別記憶部9に記憶しておく。白線種別を認識ができないときには、白線種別推定部10が白線種別記憶部9に記憶されている過去の白線種別を現在の白線の種別として推定し、それに基づいて速度制御を行う。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、リスクポテンシャル算出手段が、自車両の状態と、自車両周囲の障害物の状態とに基づいて、自車両周囲に存在する障害物に対するリスクポテンシャルを算出し、擬似車両挙動発生手段が、前記リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、前記サスペンション装置を制御することによって擬似的に発生させる。
(もっと読む)
走行環境認識装置および車両制御装置
【課題】 道路形状を精度よく予測できる走行環境認識装置および車両制御装置を提供する。
【解決手段】 車両制御装置は、自車前方走行路の状態を検出する走行路状態検出部9と、走行路状態検出部9の検出結果から少なくとも走行路上の物体の存在を認識する物体認識部10と、物体認識部10の認識結果に基づいて自車前方走行路の道路形状を予測する道路形状予測部8と、自車の走行軌跡を予測する走行軌跡予測部2と、道路形状予測部8により予測された道路の道路端と走行軌跡予測部2により予測された軌跡との交点を演算する交点演算部3と、交点演算部3により演算された交点を目標地点(衝突点)として車両の速度を制御する車両制御部5と、を備える。
(もっと読む)
車両用制御装置
【課題】この発明は、ヨーレートセンサの値を学習補正する場合において、精度の高い学習補正を常に実施でき、学習補正の精度を高めることで、精度の高い自車線の推定が可能な車両用制御装置を提供することを目的とする。
【解決手段】この発明は、ヨーレートセンサの値を、車両の走行安定性を保つための制御に利用する第1の制御装置と、前記ヨーレートセンサの値を、車両の制御に利用する第2の制御装置とを備えた車両用制御装置において、前記ヨーレートセンサが計測した値を、学習補正した値に補正する学習手段を備え、前記学習手段により学習補正した値を用いて、前記二つの制御装置はそれぞれの制御を行い、前記学習手段は、車両の状態に応じて、前記第1の制御装置、あるいは第2の制御装置のどちらか一方を用いて学習補正を実施することを特徴とする。
(もっと読む)
動力伝達装置
【課題】トルクコンバータを具備した車両に適用されるとともに、アイドルストップ後のエンジン始動時におけるクラッチ手段に対するオイル供給を瞬時且つ十分に行わせて電動オイルポンプを不要とし、コストを低減させることができる動力伝達装置を提供する。
【解決手段】エンジン制御手段22でアイドルストップ後のエンジンEを始動させる際、オイルポンプ31によるトルクコンバータ1に対するオイルの供給量を制限又は禁止し、クラッチ手段3に対するオイルの供給を優先させ得る調整手段23を備えたものである。
(もっと読む)
車両用走行支援装置
【課題】提供されたアドバイスを、運転者がより容易に実現できるように補助することが可能な車両用走行支援装置を提供すること。
【解決手段】車両の走行状態及び/又は運転操作量についてアドバイスを行なうアドバイス出力手段と、車両の走行状態及び/又は運転操作量を検出する検出手段と、車両の位置を特定する車両位置特定手段と、過去に同一位置において前記検出手段により検出された走行状態及び/又は運転操作量に基づく統計値を算出する統計値算出手段と、を備え、前記検出手段により直近に検出された走行状態及び/又は運転操作量の、前記統計値算出手段により算出された統計値からの乖離が所定程度以内である場合に、前記統計値算出手段により算出された統計値を目標値とする自動制御を行なうこと特徴とする車両用走行支援装置。
(もっと読む)
走行支援装置
【課題】本発明は、移動体の適切な上限速度を設定する走行支援装置を提供することを課題とする。
【解決手段】移動体の移動速度の上限速度に基づいて走行支援を行う走行支援装置1であって、移動体の周辺に存在する物体を検出する周辺物体検出手段10,31と、周辺物体検出手段で検出した周辺物体が移動体の進路上の領域に存在する場合と当該進路上の領域の側方領域に存在する場合とで異なる上限速度を設定する上限速度設定手段32とを備えることを特徴とする。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】より運転者の意図に整合する運転操作支援を行うこと。
【解決手段】本発明に係る自動車では、制御仮値設定手段が、自車両のリスクが縮小する方向に車両制御手段における車両制御の仮値を設定し、仮値に基づいて車両制御手段が実行した車両制御に対する運転者の応答操作を応答検出手段が検出する。制御本値設定手段は、応答検出手段によって検出された運転者の応答操作に基づいて、車両制御の本値を設定する。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】マイクロプロセッサ9が、ステレオカメラ2a,2b、加速度センサ3、ヨーレートセンサ4、車輪速センサ5a,5b,5c,5d、及び操舵角センサ6から入力された情報に基づいて、操舵操作入力の時系列データδSR*に関する評価重みwfを相対的に変更する。これにより、車両1の外界環境や車両状態に応じた適切な操舵操作量が算出されることにより、回避制御に対し運転者が感じる違和感を低減できる。
(もっと読む)
車両の制振制御装置
【課題】 車両の制振制御等に於いて、参照される車輪トルクを推定する際にその推定が良好に実行できない事情を考慮して制御を実行すること。
【解決手段】 本発明の車両の駆動力を制御することにより車両のピッチ又はバウンス振動を抑制する制振制御装置は、車輪と路面との接地個所に於いて発生する車輪に作用する車輪トルク推定値を取得する車輪トルク推定値取得部と、車輪トルク推定値に基づいてピッチ又はバウンス振動振幅を抑制するよう車両の駆動力を制御する駆動力制御部とを含み、更に、車輪のスリップ状態を示す車輪スリップ状態量を取得するスリップ状態量取得部が設けられ、車輪スリップ状態量が表すスリップの程度が大きいほど駆動力の制御量を小さく補正することを特徴とする。
(もっと読む)
車両挙動制御装置
【課題】路面状況に応じて車両のヨー運動とサスペンションの減衰力の制御を行うことで、車両挙動特性と乗心地性を向上する車両挙動制御装置を提供する。
【解決手段】本発明にかかる車両挙動制御装置は、車両の車体と前輪および後輪との間に介装され、減衰力可変機構を備えたサスペンション装置と、前輪または該後輪の少なくとも一方における該左右輪の駆動力を調整する第1のヨー運動調整手段と、輪間での差動制限度合を調整する第2のヨー運動調整手段と、路面の状況に応じて第1及び第2のヨー運動調整手段を制御して車両のヨー運動を制御するとともに、減衰力可変機構を制御して減衰力可変機構の減衰力を調整する制御手段とを有する。
(もっと読む)
車両運転支援装置
【課題】道路インフラ側の整備や交信機能の普及向上を要することなく、逆光によって運転者に見え難くなった交通信号機や道路標識などの交通情報を認識可能にして、その交通情報に従った対応を行なうことで、運転者が交通情報を見落として重大な事故を引き起こすことを未然に且つ確実に防止する。
【解決手段】車両前方画像から交通情報の存在する領域が分割され、その領域の明度分散が算出され、明度分散が所定値を超える領域が候補領域として認識される。候補領域が認識されると、その候補領域における交通情報の認識が可能になる絞り値が、その候補領域の明度分散に基づいて算出され、その絞り値で車両前方画像が再撮像される。
(もっと読む)
運転操作支援装置および運転操作支援方法
【課題】ドライバに極力違和感を与えずに、回避支援することが可能な運転操作支援装置および運転操作支援方法を提供する。
【解決手段】ドライバがとる回避操作を特定するドライバ回避操作特定部106がブレーキ操作のみを特定し、且つ、回避支援をする制御方法を選択する回避制御選択部107が制動制御と操舵制御との双方の実行を選択したときには、回避制御支援量算出部108が、回避制御開始地点(時点T1)から時間経過と共に操舵制御の支援量を増加させることにより、例えば、障害物である歩行者の動きの変化の可能性が少なくなるに連れて操舵制御の支援量を漸増させる操舵介入を行い、回避制御支援の介入時におけるドライバの違和感を低減する。
(もっと読む)
走行支援装置
【課題】運転者の意思に応じた走行制御を実行できる走行支援装置を提供する。
【解決手段】走行支援装置1は、自車両周辺の環境情報から特定された制御に基づいて自車両が実行可能な走行制御が抽出され、その走行制御が複数存在する場合にその制御因子及び制御内容が運転者に対して表示される。そして、運転者が意図する一の走行制御の選択を受け付け、その一の走行制御が自車両において優先的に実行される。これにより、例えば追従対象や信号機等といった制御因子が複数存在する場合であっても、追従対象の変更や速度の変更等といった走行制御が自動で実行されずに、運転者の意思を確認してから実行されることになる。従って、運転者が不測の車両挙動に違和感を覚えることなく、運転者の意思に応じた走行制御の実行が可能となる。
(もっと読む)
車両横転防止制御装置および車両横転防止制御方法
【課題】 横転判断精度を高めることができる車両横転防止制御装置および車両横転防止制御方法を提供する。
【解決手段】 車両挙動を制御するために作動するブレーキ装置と、ドライバの操舵に基づいて車両に対し所定のロールが発生することを予測すると共に、ドライバによる操舵の切戻しを検出する操舵入力判断部23と、操舵の切戻しが検出されたときに横転判断を行うARP制御介入判断部29と、操舵入力判断部23により所定のロールが発生すると予測され、かつ、ARP制御介入判断部29により横転判断された場合、アクチュエータであるブレーキ装置を制御し横転防止制御を行うARP制御部22と、を備えた。
(もっと読む)
車両の駆動力制御装置
【課題】低負荷時に求められる車速変動に対し駆動力段差の無いスムーズさと高負荷時に求められる変速に伴って駆動力が変化するリズム感を併せて実現することができる車両の駆動力制御装置を提供すること。
【解決手段】トルク制御可能なエンジンEng、モータ/ジェネレータMGと、変速比を有限な段数で制御可能な自動変速機ATの組み合わせにより左右後輪RL,RRに伝達する駆動力を制御する。このFRハイブリッド車両の駆動力制御装置において、要求駆動力を示す負荷を検出するアクセル開度センサ16を設ける。そして、駆動力制御手段(図6)は、アクセル開度と車速に応じてタイヤの駆動力の目標値を割り付ける「駆動力デマンド制御」と、アクセル開度と動力源の回転速度に応じて動力源の出力軸トルクの目標値を割り付ける「トルクデマンド制御」を、検出された負荷に応じて切り替える。
(もっと読む)
車両用運転支援装置
【課題】自動的に急な横移動回避が行われることによるオートメーションサプライズを抑えることができる車両用運転支援装置を提供する。
【解決手段】自車100の運動状態を検出する自車状態検出手段と、前方の障害物を検出する前方障害物検出手段としてのカメラ1と、ミリ波レーダ2と、前方障害物と接触しない自車100の第1制駆動力範囲を演算する第1制駆動力演算手段13と、後方障害物と接触しない自車100の第2制駆動力範囲を演算する第2制駆動力演算手段12と、第1及び第2制駆動力範囲を満たす自車制駆動力が存在する場合は、自車100はその制駆動力を実現して前方障害物、後方障害物との接触を回避し、存在しない場合は操舵も使用して前方障害物、後方障害物、側方障害物との接触を回避する車両操作量決定手段14と、を備える。
(もっと読む)
駆動力制御装置
【課題】運転者の操作遅れ等も加味して各輪に駆動力を配分することができる駆動力制御装置を提供することを課題とする。
【解決手段】本装置は、地図情報から、現在と先方のコーナー曲率を得て各々で規範ヨーレートを演算し、運転者のハンドル操作から運転者が望むヨーレートを演算し、現在車両で発生しているヨーレートを求め、これら3つのヨーレートの各々の差分から必要ヨーモーメントを求め、当該必要ヨーモーメントに現在の車両状態を引数として決定した重み係数を掛けたものの和を駆動力差による要求ヨーモーメントとし、当該要求ヨーモーメントより各輪の駆動力を求める。
(もっと読む)
121 - 140 / 548
[ Back to top ]